TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013255
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024110260
出願日
2024-07-09
発明の名称
作業システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20250117BHJP(水工;基礎;土砂の移送)
要約
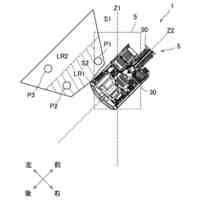
【課題】作業対象物が堆積した堆積体から偏りを取り除くことが可能な作業システムを提供する。
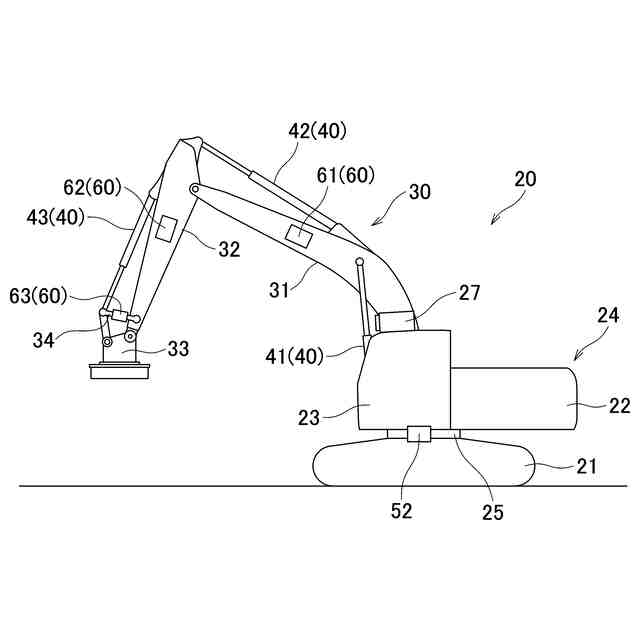
【解決手段】作業を行うアタッチメント30を備える作業機械20と、スクラップ70が堆積したスクラップ70の山75を撮像する撮像装置と、撮像装置の撮像結果に基づいて、スクラップ70の山75の形状情報を取得する取得手段と、取得手段が取得した形状情報に基づいて、アタッチメント30の作業位置を決定する決定手段と、を有する。
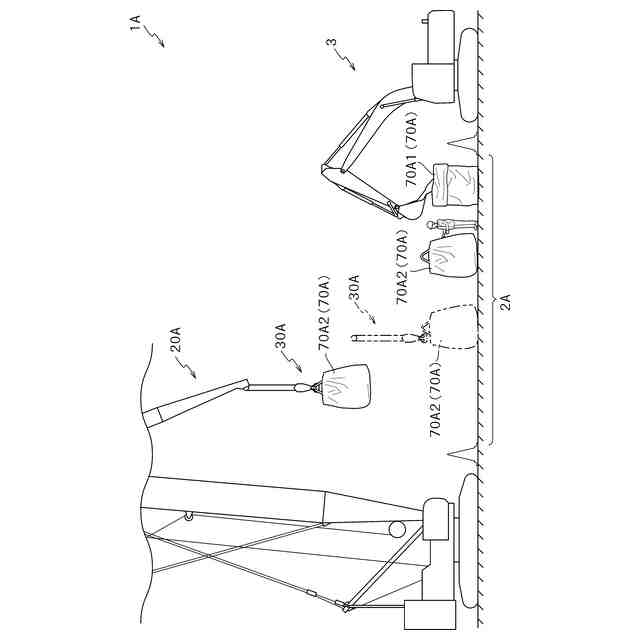
【選択図】図1
特許請求の範囲
【請求項1】
作業を行うアタッチメントを備える作業機械と、
作業対象物が堆積した堆積体を撮像する撮像装置と、
前記撮像装置の撮像結果に基づいて、前記堆積体の形状情報を取得する取得手段と、
前記取得手段が取得した前記形状情報に基づいて、前記アタッチメントの作業位置を決定する決定手段と、を有することを特徴とする作業システム。
続きを表示(約 690 文字)
【請求項2】
前記堆積体に前記作業対象物を供給する供給手段を有することを特徴とする請求項1に記載の作業システム。
【請求項3】
前記堆積体を収容する容器を有することを特徴とする請求項2に記載の作業システム。
【請求項4】
前記決定手段は、前記形状情報が所定情報を含む場合に、前記所定情報に対応する部分を前記作業位置として決定することを特徴とする請求項1~3のいずれか1項に記載の作業システム。
【請求項5】
前記所定情報は、前記堆積体の最も高い部分であることを特徴とする請求項4に記載の作業システム。
【請求項6】
前記所定情報は、前記堆積体の所定高さ以上の部分であることを特徴とする請求項4に記載の作業システム。
【請求項7】
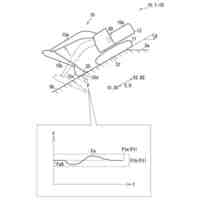
前記所定情報は、前記堆積体の斜面の傾斜角度が所定角度以上の部分であることを特徴とする請求項4に記載の作業システム。
【請求項8】
前記所定情報は、前記堆積体の麓の部分であって斜面の傾斜角度が所定角度以上の部分であることを特徴とする請求項4に記載の作業システム。
【請求項9】
前記所定情報は、前記堆積体が所定範囲からはみ出している部分であることを特徴とする請求項4に記載の作業システム。
【請求項10】
前記堆積体に前記作業対象物を供給する供給手段を有し、
前記所定情報は、前記供給手段から前記作業対象物が供給される部分であることを特徴とする請求項4に記載の作業システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械を備えた作業システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、センサを用いてスクラップ山の高さ分布を演算する演算装置が開示されている。スクラップ山の高さ分布を検出することで、リフティングマグネットを備えたクレーンを自動運転することが可能になる。
【先行技術文献】
【特許文献】
【0003】
特開平7-76488号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、スクラップピットなどの容器内に外部からスクラップ(作業対象物)が供給されるような場合、容器内のスクラップの山に偏りが生じる。このような場合に、作業機械で容器内のスクラップを万遍なく移動させていたのでは、スクラップが容器から溢れる恐れがある。そこで、適切な作業位置で作業を行うことで、スクラップが堆積した堆積体から偏りを取り除くことが望まれる。
【0005】
本発明の目的は、作業対象物が堆積した堆積体から偏りを取り除くことが可能な作業システムを提供することである。
【課題を解決するための手段】
【0006】
本発明は、作業を行うアタッチメントを備える作業機械と、作業対象物が堆積した堆積体を撮像する撮像装置と、前記撮像装置の撮像結果に基づいて、前記堆積体の形状情報を取得する取得手段と、前記取得手段が取得した前記形状情報に基づいて、前記アタッチメントの作業位置を決定する決定手段と、を有することを特徴とする。
【発明の効果】
【0007】
本発明によると、堆積体の形状情報に基づいて、アタッチメントの作業位置が決定される。よって、堆積体の形状情報に基づくことなく、アタッチメントの作業位置が決定される場合に比べて、堆積体のうち作業位置として適切な部分を、アタッチメントの作業位置として決定することができる。適切な作業位置でアタッチメントが作業を行うことで、堆積体から偏りを取り除くことができる。例えば、堆積体の最も高い部分を、アタッチメントの作業位置として決定することができる。この場合、最も高い部分の作業対象物を取り除くようにアタッチメントが作業を行うことで、堆積体の高さを低くすることができる。
【図面の簡単な説明】
【0008】
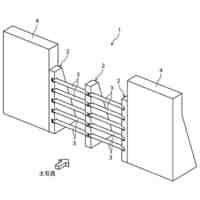
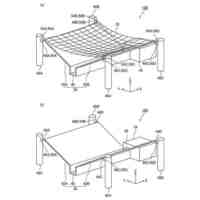
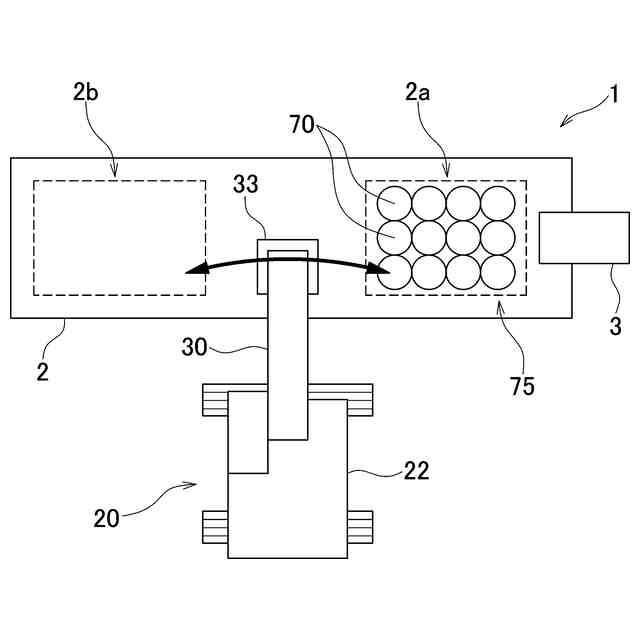
作業システムの上面図である。
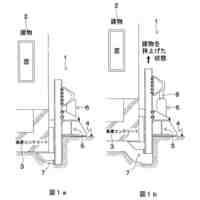
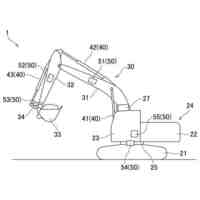
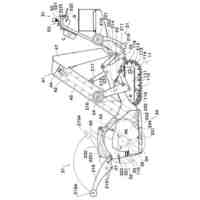
作業機械の側面図である。
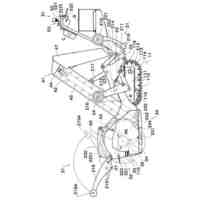
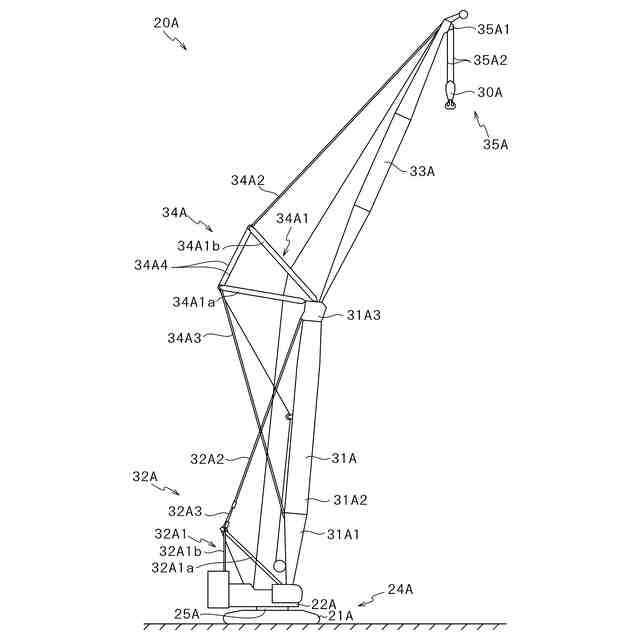
作業機械の変形例の側面図である。
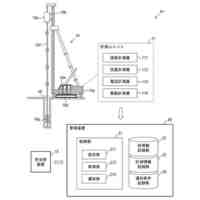
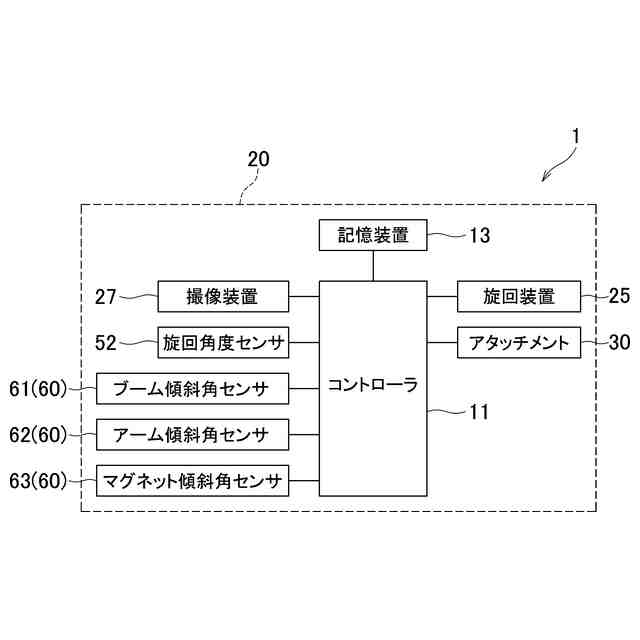
作業システムの機能構成図である。
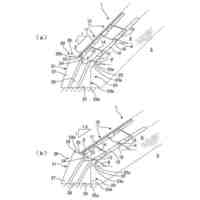
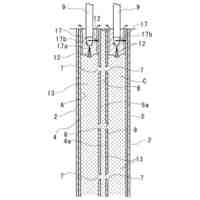
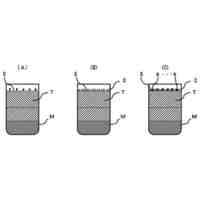
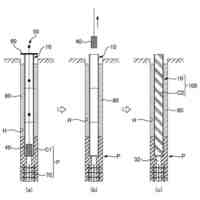
容器の側面断面図であり、スクラップの山の最も高い部分を取り除く作業を示す図である。
容器の側面断面図であり、スクラップの山の麓の部分を取り除く作業を示す図である。
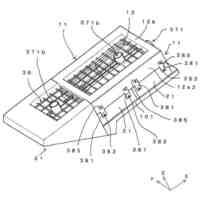
容器の上面図である。
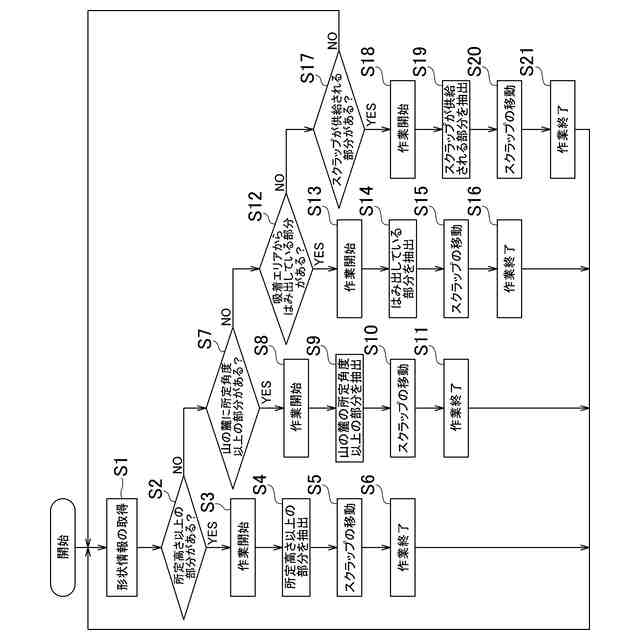
作業処理のフローチャートである。
作業システムの変形例の側面図である。
作業処理の変形例のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0010】
(作業システムの構成)
本実施形態による作業システム1は、作業システム1の上面図である図1に示すように、作業機械20を備えている。作業機械20は、作業を行うアタッチメント30を備える。本実施形態において、作業機械20は自動運転される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社高橋監理
不同沈下修正機
19日前
株式会社エスイー
防災構造物
今日
個人
潜水式土運船と土砂降ろし方法
19日前
大和クレス株式会社
斜樋管保護部材
27日前
株式会社大林組
建築物の基礎構造及び方法
5日前
カナデビア株式会社
サクション基礎
19日前
ジーネットワーク株式会社
二重管CFT合成杭
1か月前
埼玉八栄工業株式会社
地盤撹拌装置
12日前
株式会社オーイケ
擁壁および基礎ブロック
19日前
株式会社竹内製作所
作業用車両
5日前
株式会社竹内製作所
作業用車両
9日前
株式会社竹内製作所
作業用車両
9日前
日本国土開発株式会社
堆積物移動装置
26日前
五洋建設株式会社
鋼管矢板の接合方法
1か月前
コベルコ建機株式会社
作業機械
26日前
株式会社加藤建設
固化材の吐出方法
今日
株式会社小松製作所
作業機械
26日前
日本車輌製造株式会社
杭打機の制御システム
26日前
株式会社本久
砂防ソイルセメント材の品質管理方法
9日前
ジャパンパイル株式会社
中空既製杭の吊り下げ装置
今日
株式会社大林組
ベントナイト砕石の締固め管理方法
1か月前
株式会社CSPホールディングス
杭抜き方法
5日前
株式会社みどり工学研究所
上下動抑制埋設支柱及び埋設工法
5日前
日立建機株式会社
建設機械
5日前
アロン化成株式会社
排水設備用蓋
19日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
建設機械
5日前
株式会社大林組
施工支援システム及び施工支援方法
1か月前
株式会社鴻池組
地盤締固め工法
27日前
清水建設株式会社
山留め工法及び山留め構造
5日前
株式会社ササキコーポレーション
除去作業機
6日前
株式会社ササキコーポレーション
除去作業機
6日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
1か月前
株式会社大林組
構真柱の構築方法
26日前
コベルコ建機株式会社
作業機械走行システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ