TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019792
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123612
出願日
2023-07-28
発明の名称
作業機械走行システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/22 20060101AFI20250131BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の走行面に傾斜の変化があっても、作業機械が安定して走行できるようにする。
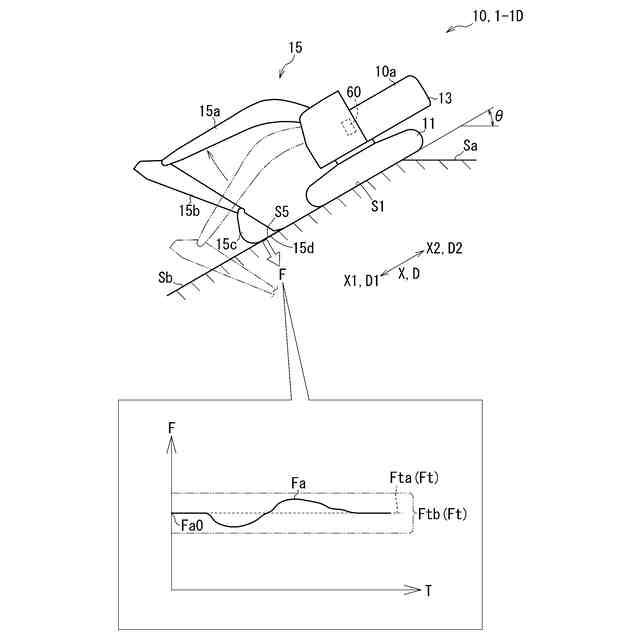
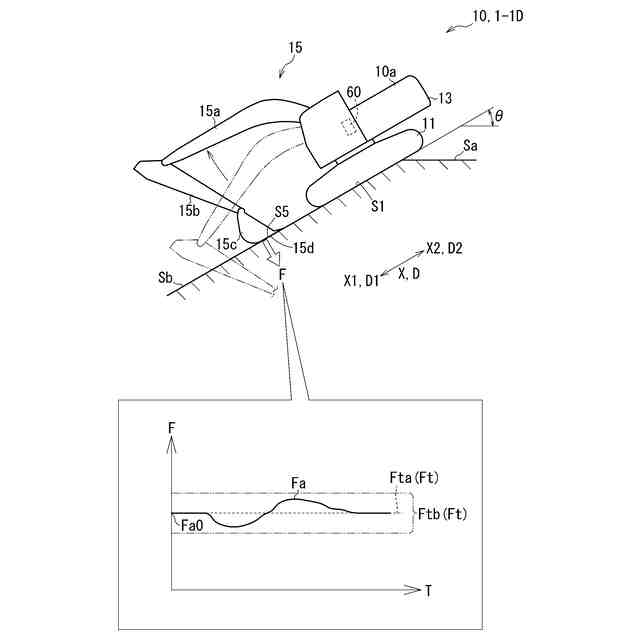
【解決手段】コントローラ60は、走行前支持力Fa0を取得する。走行前支持力Fa0は、アタッチメント15が支持面S5に接した状態、かつ、機械本体10aが走行する前に、支持力センサ31に検出された支持力Fである。コントローラ60は、走行前支持力Fa0に基づいて、目標支持力Ftを設定する。コントローラ60は、アタッチメント15が支持面S5に接するとともに機械本体10aが走行している時に、支持力センサ31に検出される支持力(Fa)が目標支持力Ftに保たれるように、アタッチメント駆動装置23を制御する。
【選択図】図4D
特許請求の範囲
【請求項1】
作業機械の本体部であり、走行可能である機械本体と、
前記機械本体に起伏可能に取り付けられたアタッチメントと、
前記アタッチメントを駆動させるアタッチメント駆動装置と、
前記アタッチメントが支持面に接したときに前記アタッチメントから前記支持面に作用する力である支持力を検出する支持力センサと、
コントローラと、
を備え、
前記コントローラは、
前記アタッチメントが前記支持面に接した状態、かつ、前記機械本体が走行する前に、前記支持力センサに検出された前記支持力である走行前支持力を取得し、
前記走行前支持力に基づいて、目標支持力を設定し、
前記アタッチメントが前記支持面に接するとともに前記機械本体が走行している時に、前記支持力センサに検出される前記支持力が前記目標支持力に保たれるように、前記アタッチメント駆動装置を制御する、
作業機械走行システム。
続きを表示(約 390 文字)
【請求項2】
請求項1に記載の作業機械走行システムであって、
前記目標支持力は、前記走行前支持力である、
作業機械走行システム。
【請求項3】
請求項1に記載の作業機械走行システムであって、
前記コントローラは、前記機械本体が走行している時に、前記アタッチメントのうち前記支持面に接している部分の前記支持面に対する位置が保たれるように、前記アタッチメント駆動装置を制御する、
作業機械走行システム。
【請求項4】
請求項1に記載の作業機械走行システムであって、
前記コントローラは、さらに、前記アタッチメントの姿勢の情報、前記機械本体の走行速度の情報、および、前記機械本体が走行する走行面の傾斜の情報、のうち1つの情報または複数の情報に基づいて、前記目標支持力を設定する、
作業機械走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行可能な機械本体を備える作業機械の作業機械走行システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば特許文献1に、作業機械の姿勢安定度を監視しながら、作業機械をトレーラに積み込む技術が記載されている。同文献に記載の技術では、作業機械の姿勢安定度に基づいて、トレーラへの自動積込制御(走行制御)が中止または継続される(同文献の[0198]参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/101007号
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械が走行する走行面に傾斜の変化があっても、作業機械を安定して走行させることが望まれている。
【0005】
本発明の目的は、作業機械の走行面に傾斜の変化があっても、作業機械が安定して走行できる、作業機械走行システムを提供することである。
【課題を解決するための手段】
【0006】
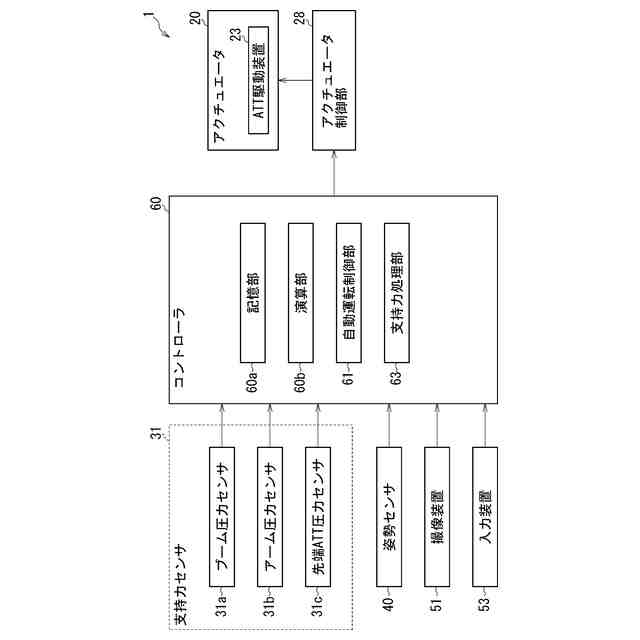
作業機械走行システムは、機械本体と、アタッチメントと、アタッチメント駆動装置と、支持力センサと、コントローラと、を備える。前記機械本体は、作業機械の本体部であり、走行可能である。前記アタッチメントは、前記機械本体に起伏可能に取り付けられる。前記アタッチメント駆動装置は、前記アタッチメントを駆動させる。前記支持力センサは、前記アタッチメントが支持面に接したときに前記アタッチメントから前記支持面に作用する力である支持力を検出する。前記コントローラは、走行前支持力を取得する。前記走行前支持力は、前記アタッチメントが前記支持面に接した状態、かつ、前記機械本体が走行する前に、前記支持力センサに検出された前記支持力である。前記コントローラは、前記走行前支持力に基づいて、目標支持力を設定する。前記コントローラは、前記アタッチメントが前記支持面に接するとともに前記機械本体が走行している時に、前記支持力センサに検出される前記支持力が前記目標支持力に保たれるように、前記アタッチメント駆動装置を制御する。
【発明の効果】
【0007】
上記の作業機械走行システムにより、作業機械の走行面に傾斜の変化があっても、作業機械が安定して走行できる。
【図面の簡単な説明】
【0008】
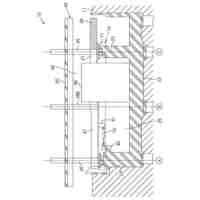
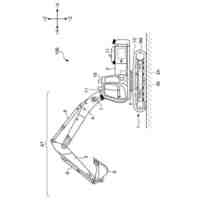
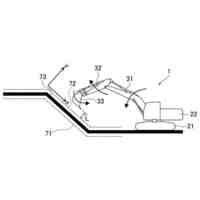
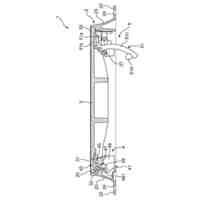
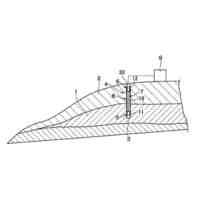
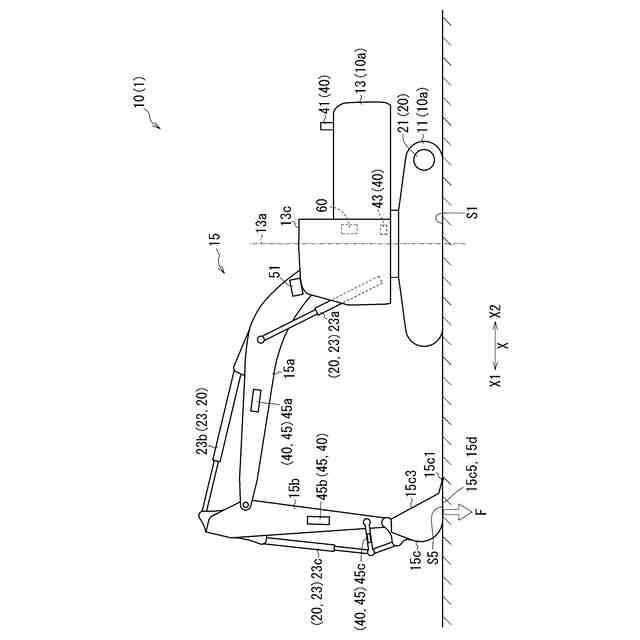
作業機械走行システム1の作業機械10を横から見た図である。
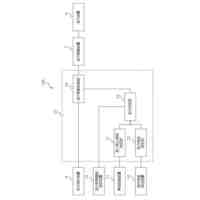
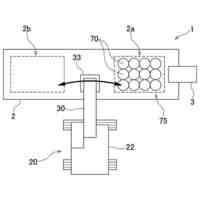
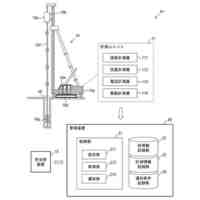
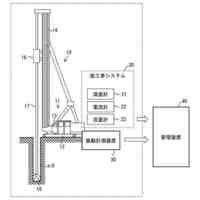
作業機械走行システム1を示すブロック図である。
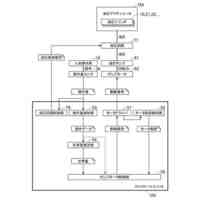
図2に示すコントローラ60の処理のフローチャートである。
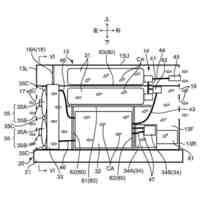
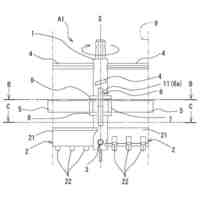
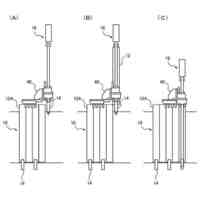
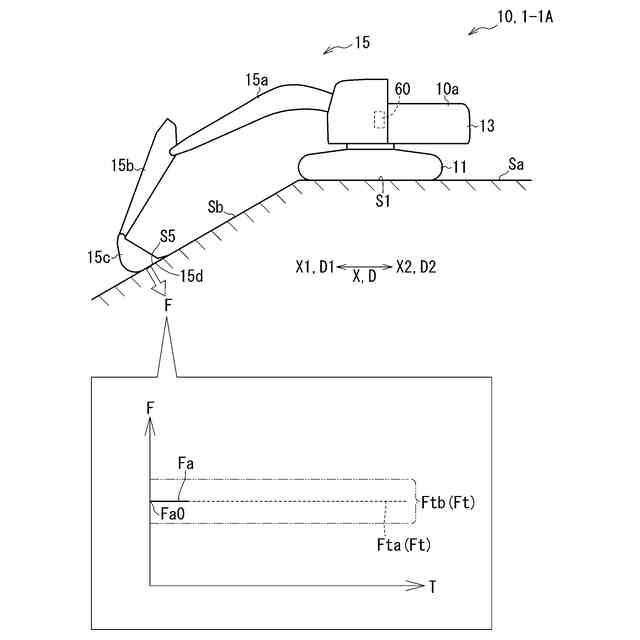
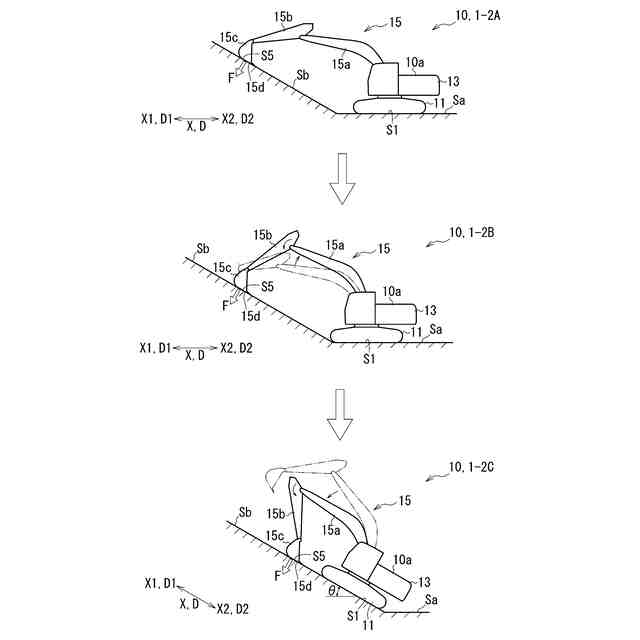
図1に示す作業機械10が平地Saで停止しているときの、作業機械10および検出支持力Faなどを示す図である。
図4Aに示す作業機械10が、図4Aに示す状態から前進した状態を示す図4A相当図である。
図4Bに示す作業機械10が、図4BAに示す状態からさらに前進した状態を示す図4A相当図である。
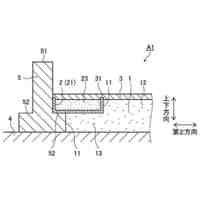
図4Cに示す作業機械10が、斜面Sbを走行する状態を示す図4A相当図である。
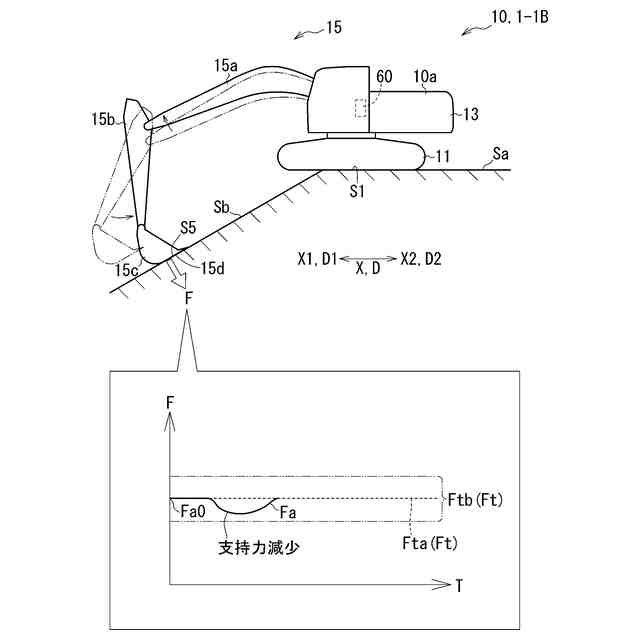
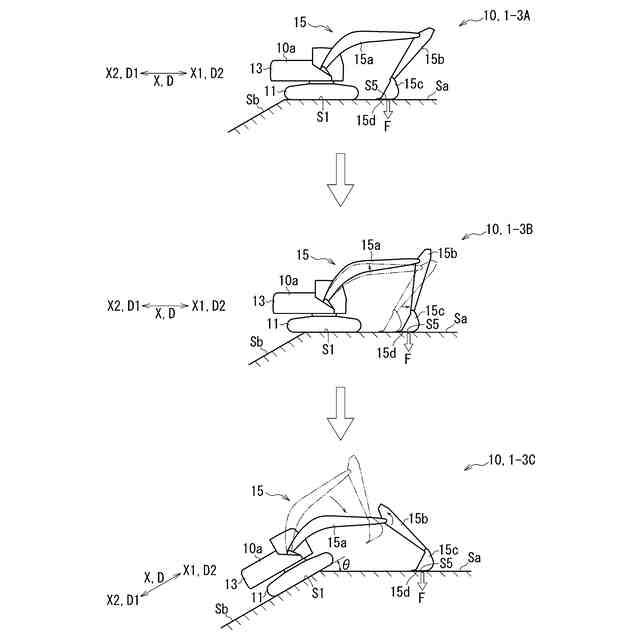
図1に示す作業機械10が、前進し、斜面Sbを上るときの作業機械10などを示す図である。
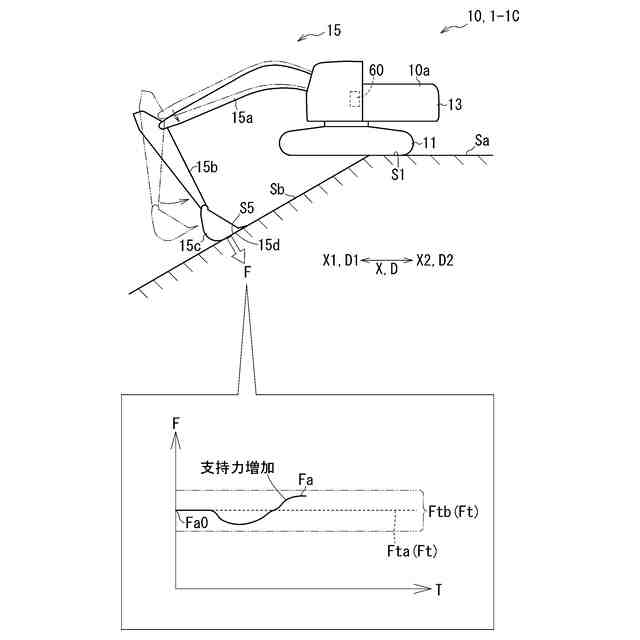
図1に示す作業機械10が、後進し、斜面Sbを下るときの、作業機械10などを示す図である。
図1に示す作業機械10が、後進し、斜面Sbを上るときの、作業機械10などを示す図である。
図1に示す支持面S5に対する支持面接触部15dの位置を保持しながら、機械本体10aが走行するときの、作業機械10などを示す図である。
図1に示すアタッチメント15の重心、および、作業機械10の転倒支点11tなどを示す図である。
図1に示すアタッチメント15の自重による転倒モーメントMと、目標支持力Ftと、の関係を示すグラフである。
図1に示す機械本体10aの走行速度Vと、目標支持力Ftと、の関係を示すグラフである。
【発明を実施するための形態】
【0009】
図1~図11を参照して、作業機械走行システム1について説明する。
【0010】
作業機械走行システム1は、図1に示す作業機械10を安定して走行させるためのシステムである。作業機械走行システム1は、作業機械10が走行する走行面S1(走行路)の傾斜が変化したときの作業機械10の揺動および転倒を抑制する。作業機械走行システム1は、作業機械10と、図2に示す撮像装置51と、入力装置53と、コントローラ60と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
建築物
26日前
鹿島建設株式会社
漂流物の捕捉構造
19日前
日本車輌製造株式会社
杭打機
23日前
株式会社クボタ
作業機
19日前
コベルコ建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
21日前
株式会社テクアノーツ
通船ゲート装置
23日前
住友重機械工業株式会社
ショベル
26日前
住友重機械工業株式会社
ショベル
26日前
ジーネットワーク株式会社
二重管CFT合成杭
6日前
日本植生株式会社
緑化土嚢袋
19日前
日本車輌製造株式会社
アースドリル
13日前
株式会社地盤リスク研究所
擁壁の補強工法
23日前
有限会社 櫂設計事務所
掘削・撹拌具
19日前
五洋建設株式会社
鋼管矢板の接合方法
5日前
コベルコ建機株式会社
作業機械
20日前
株式会社技研製作所
杭の定着方法
6日前
大和ハウス工業株式会社
建物の建設方法
26日前
日之出水道機器株式会社
地下構造物用蓋
19日前
株式会社大林組
ベントナイト砕石の締固め管理方法
6日前
コベルコ建機株式会社
作業システム
19日前
大和ハウス工業株式会社
浸水推定装置
23日前
個人
ローラー転圧装置を備えた油圧ショベル
13日前
コベルコ建機株式会社
作業システム
23日前
井関農機株式会社
作業車両
20日前
清水建設株式会社
礫材の液状化対策構造
23日前
一般財団法人電力中央研究所
地盤の状況計測装置
26日前
株式会社宮本組
大深度掘削機の作業支援システム
12日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
23日前
株式会社竹中土木
堤体補強構造
6日前
コベルコ建機株式会社
建設機械
22日前
株式会社大林組
施工支援システム及び施工支援方法
6日前
株式会社大林組
判定支援システム及び判定支援方法
26日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
6日前
株式会社SAICON
設備機器設置台及び設備機器設置構造
12日前
株式会社高知丸高
水陸両用浚渫機
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ