TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024137253
公報種別
公開特許公報(A)
公開日
2024-10-07
出願番号
2023048700
出願日
2023-03-24
発明の名称
作業車両
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/22 20060101AFI20240927BHJP(水工;基礎;土砂の移送)
要約
【課題】掘削位置や積込位置が変わった場合にも、運搬車両から離脱する後進操作時に、移動距離を再設定する必要が無く、荷役装置の動作を自動制御することができる作業車両を提供する。
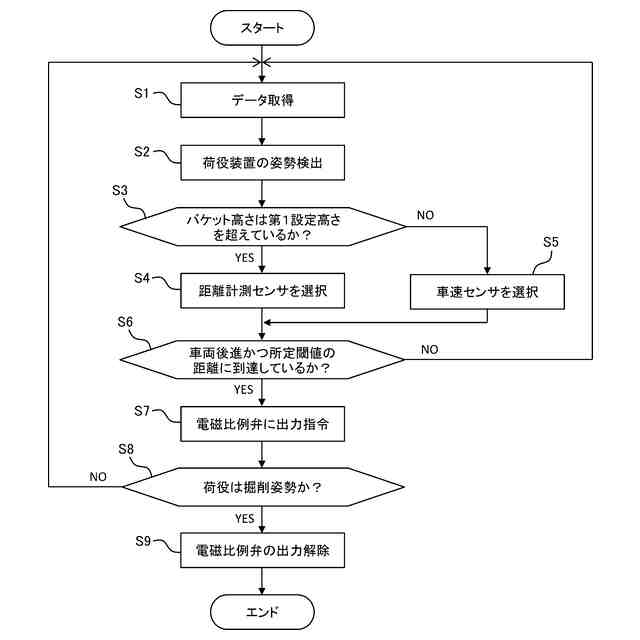
【解決手段】本発明のホイールローダ100は、荷役装置2を制御するコントローラ200を備えており、コントローラ200は、運搬車両からの後進操作時に、バケット10が第1設定高さよりも高い位置にある場合は、距離計測センサ53で計測した移動距離である第1距離計測値に基づいて、バケット10をダンプ位置から第1設定高さまで下げるように制御し、バケット10の高さが第1設定高さまで到達すると、車速センサ52で計測した車速から算出される移動距離である第2距離計測値に基づいて、バケット10を第1設定高さから掘削姿勢である第2設定高さまで下げるように制御する。
【選択図】図6
特許請求の範囲
【請求項1】
車体と、前記車体の前部に上下方向へ回動可能に設けられたリフトアームと、前記リフトアームの先端側にダンプもしくはチルト動作可能に設けられたバケットと、前記リフトアーム及び前記バケットを含む荷役装置の動作を制御するコントローラと、を備えた作業車両において、
前記車体の前部に取り付けられた距離計測センサと、
前記車体の車速を検出する車速センサと、を有し、
前記コントローラは、
前記車体を運搬車両から離脱する後進操作時において、
前記バケットの高さが第1設定高さを超えていると判定した場合に、前記距離計測センサで計測した前記運搬車両からの移動距離である第1距離計測値に基づいて前記バケットをダンプ位置から前記第1設定高さまで下げる第1制御を行い、
前記バケットの高さが前記第1設定高さ以下であると判定した場合に、前記車速センサで計測した車速から算出される移動距離である第2距離計測値に基づいて前記バケットを前記第1設定高さから第2設定高さまで下げる第2制御を行う、
ことを特徴とする作業車両。
続きを表示(約 320 文字)
【請求項2】
請求項1に記載の作業車両において、
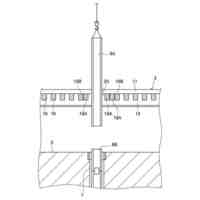
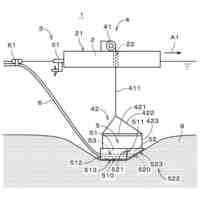
前記距離計測センサは、前記車体の前部における前記リフトアームの回動支点の近傍位置よりも低い位置に設置されている、
ことを特徴とする作業車両。
【請求項3】
請求項1に記載の作業車両において、
前記コントローラは、前記バケットが積荷を放出した状態であると判定した場合に限り、前記荷役装置の前記第1制御及び前記第2制御を行う、
ことを特徴とする作業車両。
【請求項4】
請求項1に記載の作業車両において、
前記距離計測センサは、ミリ波レーダ、ライダー、ステレオカメラの何れかである、
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ホイールローダ等の作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
作業車両の一例であるホイールローダの一般的な作業として、掘削作業後に掘削した積荷をダンプトラック等の運搬車両に積み込む作業がある。この作業では、運搬車両にバケットの積荷を投入した後、運搬車両から離脱する後進時に、バケットやリフトアーム等で構成される荷役装置を投入姿勢から掘削姿勢に変更する操作が行われる。その際に、オペレータは、ホイールローダの後進操作と荷役装置の姿勢操作という異なる2種類の操作を必要とするため、荷役装置の動作を一部自動化してオペレータの負担を低減するという技術が知られている。
【0003】
例えば特許文献1には、ホイールローダの作業状態を検出する作業状態検出手段と、作業状態検出手段で検出された作業状態に応じて、作業機の目標位置及びホイールローダの移動距離との関係を設定する目標設定手段と、ホイールローダの移動距離を検出する移動距離検出手段と、移動距離検出手段で検出された移動距離に応じて求められた作業機の目標位置にブーム及びバケットを移動させる作業機制御手段と、を備えたホイールローダが記載されている。
【0004】
特許文献1に記載のホイールローダでは、車体から運搬車両(ダンプトラック)までの移動距離を設定すると共に、設定された移動距離と作業機(荷役装置)の目標位置との関係を設定しておき、積荷の投入後に車体を運搬車両から起点位置まで離脱させる後進操作時に、車速センサ(移動距離検出手段)で検出される距離に応じて、作業機のバケット及びブームを自動制御して目標位置に移動させるようにしている。
【先行技術文献】
【特許文献】
【0005】
国際公開2015/129932号
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載のホイールローダは、運搬車両とホイールローダ間の移動距離を事前に設定して自動制御するという技術であるため、運搬車両に対するホイールローダの起点位置が変わると、その都度、移動距離の設定を変える必要がある。特に、掘削現場では作業の進捗に応じて掘削位置が変化する。また、運搬車両毎に運搬車両の停止位置が異なると、掘削した積荷を積み込む積込位置が変化する。そのため、特許文献1に記載の技術では、掘削位置や積込位置を設定し直す必要に迫られる。
【0007】
本発明は、このような従来技術の実情からなされたもので、その目的は、掘削位置や積込位置が変わった場合にも、運搬車両から離脱する後進操作時に、移動距離を再設定する必要が無く、荷役装置の動作を自動制御することができる作業車両を提供することにある。
【課題を解決するための手段】
【0008】
上記の目的を達成するために、代表的な本発明は、車体と、前記車体の前部に上下方向へ回動可能に設けられたリフトアームと、前記リフトアームの先端側にダンプもしくはチルト動作可能に設けられたバケットと、前記リフトアーム及び前記バケットを含む荷役装置の動作を制御するコントローラと、を備えた作業車両において、前記車体の前部に取り付けられた距離計測センサと、前記車体の車速を検出する車速センサと、を有し、前記コントローラは、前記車体を運搬車両から離脱する後進操作時において、前記バケットの高さが第1設定高さを超えていると判定した場合に、前記距離計測センサで計測した前記運搬車両からの移動距離である第1距離計測値に基づいて前記バケットをダンプ位置から前記第1設定高さまで下げる第1制御を行い、前記バケットの高さが前記第1設定高さ以下であると判定した場合に、前記車速センサで計測した車速から算出される移動距離である第2距離計測値に基づいて前記バケットを前記第1設定高さから第2設定高さまで下げる第2制御を行う、ことを特徴とする。
【発明の効果】
【0009】
本発明に係る作業車両よれば、掘削位置や積込位置が変わった場合にも、運搬車両から離脱する後進操作時に、移動距離を再設定する必要が無く、荷役装置の動作を自動制御することができる。なお、前述した以外の課題、構成、及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
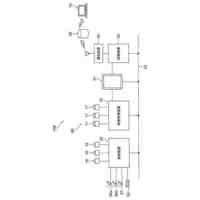
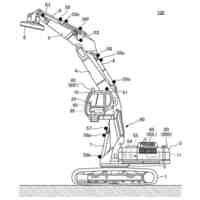
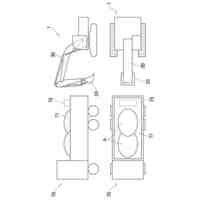
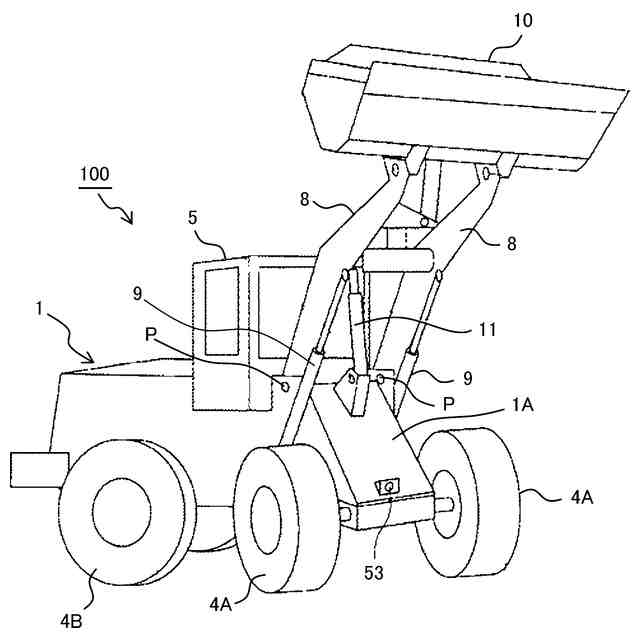
本発明の実施形態に係るホイールローダの側面図である。
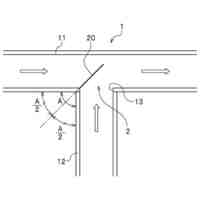
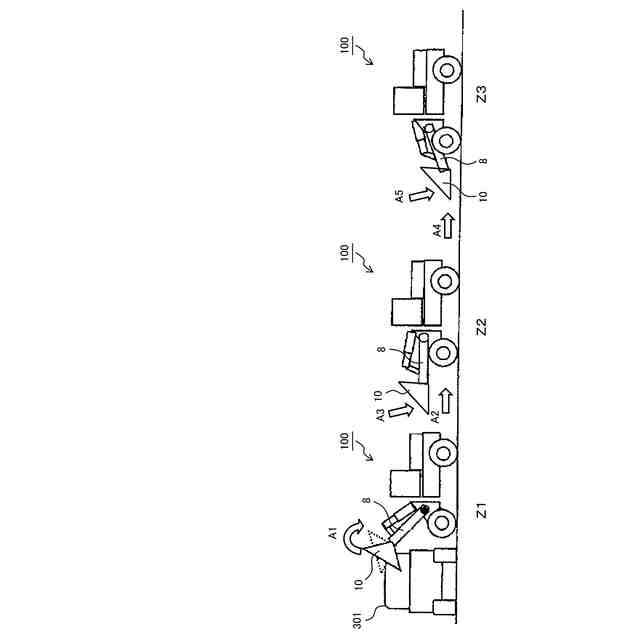
ホイールローダのVシェイプ作業を示す説明図である。
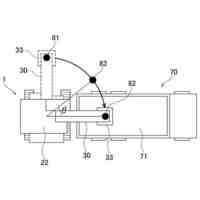
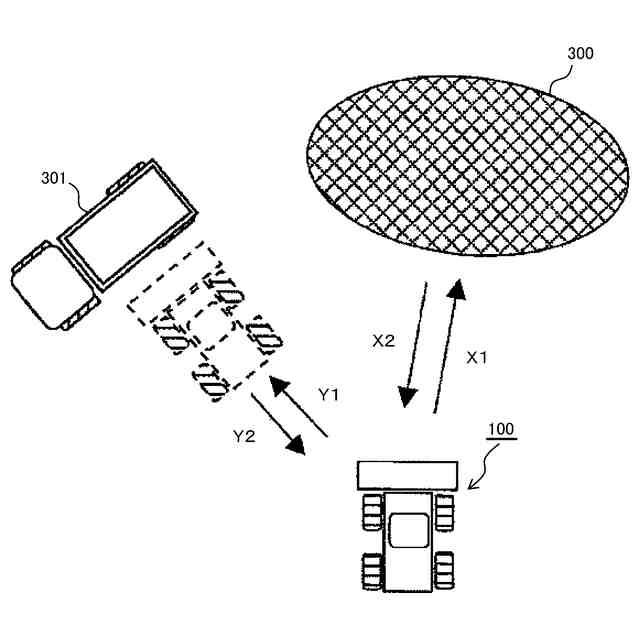
ホイールローダのダンプ積込み後の動作を示す説明図である。
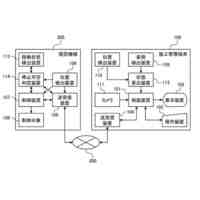
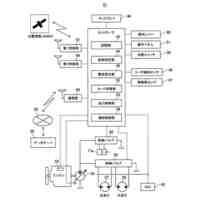
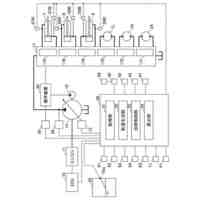
コントローラが有する機能を示すブロック図である。
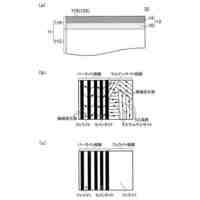
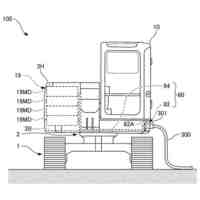
距離計測センサの取り付け位置を示す説明図である。
コントローラで実行される処理の流れを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
6日前
日立建機株式会社
作業機械の稼働現場管理システム
26日前
日立建機株式会社
窒化鋼部品及び窒化鋼部品の製造方法
2か月前
日立建機株式会社
建設機械の動作制御システム
17日前
個人
エア津波緩衝装置
19日前
個人
指示装置
18日前
鹿島建設株式会社
接合構造
25日前
株式会社クボタケミックス
桝蓋
18日前
株式会社不二越
建設機械
25日前
住友建機株式会社
ショベル
12日前
住友建機株式会社
ショベル
25日前
日本車輌製造株式会社
建設機械
1か月前
コベルコ建機株式会社
作業機械
19日前
住友重機械工業株式会社
作業機械
26日前
個人
鋼管杭とその製造方法
18日前
住友重機械工業株式会社
作業機械
18日前
鹿島建設株式会社
建込み方法
4日前
株式会社フジタ
建築物とその施工方法
25日前
株式会社乗富鉄工所
水門開閉装置の設置方法
1か月前
日本車輌製造株式会社
杭打機の制御装置
1か月前
コベルコ建機株式会社
作業機械
18日前
コベルコ建機株式会社
作業機械
18日前
千代田工営株式会社
杭と上部構造物との接合構造
25日前
住友重機械工業株式会社
作業機械の制御装置
18日前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
13日前
株式会社不二越
建設機械用旋回ブレーキ装置
1か月前
個人
アンカーボルト支持装置
13日前
ヤンマーホールディングス株式会社
作業機械
18日前
スーパーレジンクラフト株式会社
防塵板付消波装置
12日前
日立建機株式会社
作業車両
6日前
株式会社JAST
鋼管杭撤去装置
25日前
住友重機械工業株式会社
作業機械の管理システム
1か月前
三陽機器株式会社
作業機の作業部連結構造
6日前
株式会社竹中工務店
山留め工法
18日前
カナデビア株式会社
排砂装置および排砂方法
1か月前
大成建設株式会社
整流構造
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ