TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024136884
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023048181
出願日
2023-03-24
発明の名称
ロボットの手首機構
出願人
白山工業株式会社
代理人
個人
,
個人
主分類
B25J
17/02 20060101AFI20240927BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】原子炉などの極限状態においても構成要素が破壊、損傷されることなく信頼性が高く、純粋にメカニカルな構造となっていて、作業を行うロボットの指先を含めた4自由度で柔軟に動作するロボットの手首機構を提供する
【解決手段】グリッパを具備するロボットの手首機構において、根本側からメカニカルな動力伝達系で伝搬される4つの駆動源からの駆動力で、互いに直交する3軸自由度の回転運動と、グリッパを開閉する1自由度の開閉運動を実現する。
【選択図】図1
特許請求の範囲
【請求項1】
グリッパを具備するロボットの手首機構において、根本側からメカニカルな動力伝達系で伝搬される4つの駆動源からの駆動力で、互いに直交する3軸自由度の回転運動と、前記グリッパを開閉する1自由度の開閉運動とを実現することを特徴とするロボットの手首機構。
続きを表示(約 2,400 文字)
【請求項2】
前記3軸自由度の回転運動が、第1回転軸と、前記第1回転軸に直交する第2回転軸と、前記第2回転軸に直交する第3回転軸とで成る請求項1に記載のロボットの手首機構。
【請求項3】
第1回転軸回りに回転自在に支持され、第1の駆動源で回転駆動される第1の傘歯車と、
前記第1回転軸回りに回転自在に支持され、前記第1の傘歯車の軸内を貫通し、第3の駆動源で駆動される第3の傘歯車と、
前記第1回転軸回りに、前記第1の傘歯車及び前記第3の傘歯車と対向して回転自在に支持され、第2の駆動源で駆動される第2の傘歯車と、
前記第2の傘歯車の軸内を貫通して回転自在に支持され、第4の駆動源で駆動される第4の傘歯車と、
前記第1の傘歯車及び前記第2の傘歯車と噛合し、前記第1回転軸と直交する第2回転軸回りに回転自在に支持される第5の傘歯車と、
前記第2回転軸回りに回転自在に支持される前記第5の傘歯車の軸内を貫通して回転自在に支持され、前記第3の傘歯車と噛合する第6の傘歯車と、
前記第2回転軸回りに回転自在に支持される前記第6の傘歯車の軸内を貫通して回転自在に支持され、前記第4の傘歯車と噛合する第7の傘歯車と、
前記第6の傘歯車の軸の他端に連結された第8の傘歯車と、
前記第7の傘歯車の軸の他端に連結された第9の傘歯車と、
前記第2回転軸と直交する第3回転軸の一端に連結され、前記第8の傘歯車と噛合する第10の傘歯車と、
前記第9の傘歯車と噛合し、軸が前記第10の傘歯車の軸内を貫通して前記第3回転軸の一端に連結された第11の傘歯車と、
前記第3回転軸の他端に連結されたグリッパと、
前記第11の傘歯車の他端に連結され、前記グリッパを開閉する減速機構と、
で構成されていることを特徴とするロボットの手首機構。
【請求項4】
前記第1の駆動源による前記第1の傘歯車の駆動と前記第2の駆動源による前記第2の傘歯車の駆動により、前記第2回転軸の前記第1転軸回りの回転角と自分自身の第2回転軸回りの回転角を制御し、前記第3の駆動源による前記第3の傘歯車の駆動により、前記第3回転軸の第2回転軸回りの回転角を制御し、前記第4の駆動源による前記第4の傘歯車の駆動により、前記減速機構を介して前記グリッパを開閉制御する請求項3に記載のロボットの手首機構。
【請求項5】
第1回転軸回りに回転自在に支持され、軸の一端に第1の駆動輪が連結され、他端に第1の回転輪が連結された第1の駆動体と、
前記第1回転軸回りに回転自在に支持され、前記第1の駆動体の軸を貫通した軸の一端に第3の駆動輪が連結され、他端に第3の回転輪が連結された第3の駆動体と、
前記第1回転軸回りに、前記第1の駆動体及び前記第3の駆動体と対向し、軸の一端に第2の駆動輪が連結され、他端に第2の回転輪が連結された第2の駆動体と、
前記第1回転軸回りに、前記第2の駆動体の軸を貫通した軸の一端に第4の駆動輪が連結され、他端に第4の回転輪が連結された第4の駆動体と、
前記第1回転軸と直交して配設された第5の回転輪と、
回転自在に前記第5の回転輪を貫通した軸の一端に連結された第6の回転輪と、他端に連結された第8の回転輪と、
前記第5の回転輪及び前記第6の回転輪の軸を貫通した軸の一端に連結された第7の回転輪と、他端に連結された第9の回転輪と、
前記第2回転軸と直交して配設された第3回転軸の一端に設けられた第10の回転輪と、他端に第1の減速装置を介して連結されたグリッパと、
前記第10の回転輪を貫通した軸の一端に設けられた第11の回転輪と、前記第11の回転輪の他端に設けられた第2の減速装置で駆動される前記グリッパの把持部材と、
第1の方向変換用回転体を介して、前記第1の回転輪、前記第5の回転輪、前記第2の回転輪に懸架された第1の紐状部材と、
第2の方向変換用回転体を介して、前記第3の回転輪、前記第7の回転輪に懸架された第2の紐状部材と、
第3の方向変換用回転体を介して、前記第4の回転輪、前記第6の回転輪に懸架された第3の紐状部材と、
第4の方向変換用回転体を介して、前記第9の回転輪、前記第10の回転輪に懸架された第4の紐状部材と、
第5の方向変換用回転体を介して、前記第8の回転輪、前記第11の回転輪に懸架された第5の紐状部材と、
で構成されていることを特徴とするロボットの手首機構。
【請求項6】
前記第1の駆動源による前記第1の回転輪の駆動及び前記第2の駆動源による前記第2の回転輪の駆動と前記第5の回転輪の係合により、前記第1回転軸回りの第2回転軸の回転と、前記第2回転軸回りの第3回転軸の回転角を制御し、
前記第3の駆動源による前記第3の回転輪の駆動により、前記第3回転軸回りの回転角を前記第1の減速装置を介して制御し、
前記第4の駆動源による前記第4の回転輪の駆動により、前記第2の減速装置を介して前記グリッパを開閉制御する請求項5に記載のロボットの手首機構。
【請求項7】
前記第1の回転輪~前記第11の回転輪がいずれもプーリであり、前記第1の紐状部材~前記第5の紐状部材がいずれもワイヤ若しくはロープである請求項5又は6に記載のロボットの手首機構。
【請求項8】
前記第1の回転輪~前記第11の回転輪がいずれもスプロケットであり、前記第1の紐状部材~前記第5の紐状部材がいずれもチェーンである請求項5又は6に記載のロボットの手首機構。
発明の詳細な説明
【技術分野】
【0001】
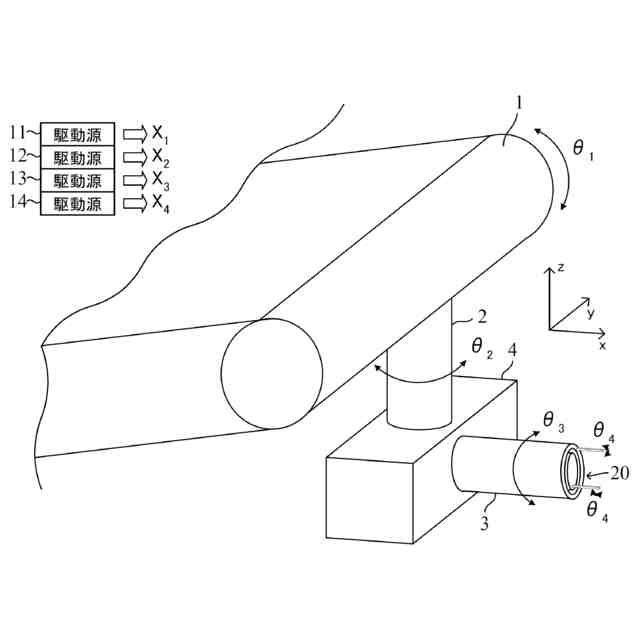
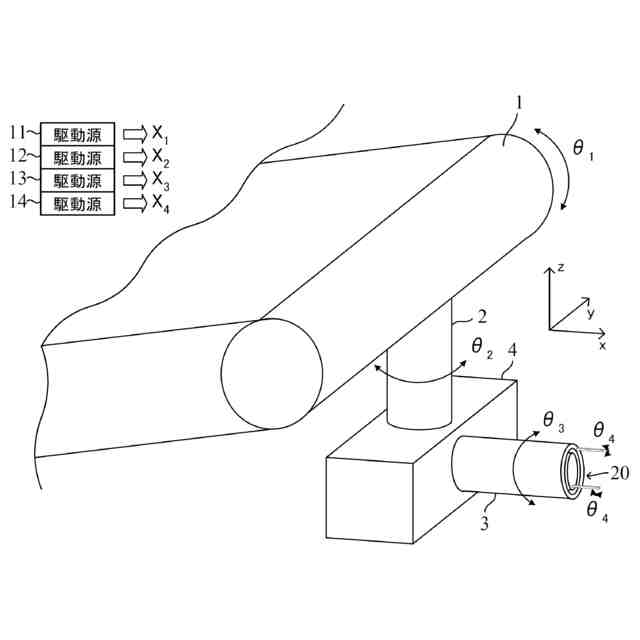
本発明はロボットの手首機構に関し、特に3方向の回転と共に、グリッパの開閉も行い得る4自由度のロボットの手首機構に関する。即ち、本発明は、根本側からメカニカルな動力伝達系で伝搬される4つの駆動源からの駆動力で、互いに直交する3軸自由度の回転運動と、グリッパを開閉する1自由度の開閉運動(回転運動)とを実現するロボットの手首機構に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
ロボットの手首機構は、ロボットアームの先端部のロボットハンドを繋ぐ部分に相当し、手首機構の先端部には、物体を把持するなどの作業を行うグリッパ(指)が設けられている。根元側の駆動源から動力伝達されるように構成される、ロボットの手首機構に関する従来技術を示す文献として、例えば下記文献が挙げられるが、いずれも3自由度以下の動きに留まっている。
【先行技術文献】
【特許文献】
【0003】
特許第6443456号公報
特開昭57-61491号公報
特開平8-141968号公報
特開2006-289534号公報
米国特許出願公開第2012/0067150号明細書
米国特許出願公開第2012/0034022号明細書
【非特許文献】
【0004】
Makoto Jinno, “Proof of concept for a wrist mechanism for articulated forceps for use in robot-assisted laparoscopic surgery”, ROBOMECH Journal 5, Article number. 5 (2018)
【発明の概要】
【発明が解決しようとする課題】
【0005】
廃炉作業を行うロボットの指先や手首は、高放射性物質に直接触れたり、すぐ傍らに近づくため、放射線に弱い半導体部品やセンサを搭載しないことが望ましい。即ち、モータ(アクチュエータ)やモータドライバはアーム機構の基台部に搭載し、手先機構は純粋にメカニカルな機構駆動系のみで構成して、根元から遠隔駆動することが望ましい。そして、手首機構には3方向の回動と共に、グリッパの開閉も含めると合計4自由度の運動を遠隔操作できることが必要である。
【0006】
しかしながら、従来のロボットの手首機構では、根元からの動力伝達でもって4自由度の運動(回動)をするものは存在していなかった。
【0007】
本発明は上述のような事情よりなされたものであり、本発明の目的は、原子炉などの極限状態においても構成要素が破壊、損傷されることなく信頼性が高く、純粋にメカニカルな構造となっていて、作業を行うロボットの指先を含めた4自由度で柔軟に動作するロボットの手首機構を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、グリッパを具備するロボットの手首機構に関し、本発明の上記目的は、根本側からメカニカルな動力伝達系で伝搬される4つの駆動源からの駆動力で、互いに直交する3軸自由度の回転運動と、前記グリッパを開閉する1自由度の開閉運動を実現することにより達成される。
【0009】
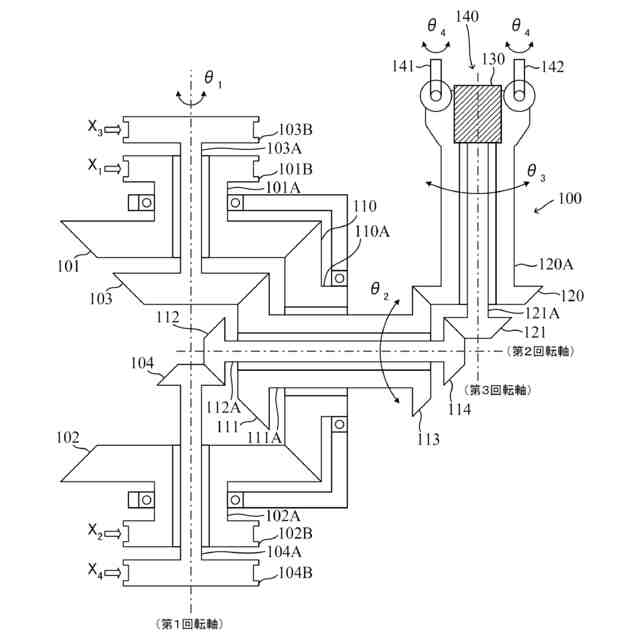
また、本発明の上記目的は、第1回転軸回りに回転自在に支持され、第1の駆動源(X
1
)で回転駆動される第1の傘歯車(101)と、前記第1回転軸回りに回転自在に支持され、前記第1の傘歯車(101)の軸内を貫通し、第3の駆動源(X
3
)で駆動される第3の傘歯車(103)と、前記第1回転軸回りに、前記第1の傘歯車(101)及び前記第3の傘歯車(103)と対向して回転自在に支持され、第2の駆動源(X
2
)で駆動される第2の傘歯車(102)と、前記第2の傘歯車(102)の軸内を貫通して回転自在に支持され、第4の駆動源(X
4
)で駆動される第4の傘歯車(104)と、前記第1の傘歯車(101)及び前記第2の傘歯車(102)と噛合し、前記第1回転軸と直交する第2回転軸回りに回転自在に支持される第5の傘歯車(110)と、前記第2回転軸回りに回転自在に支持される前記第5の傘歯車(110)の軸内を貫通して回転自在に支持され、前記第3の傘歯車(103)と噛合する第6の傘歯車(111)と、前記第2回転軸回りに回転自在に支持される前記第6の傘歯車(111)の軸内を貫通して回転自在に支持され、前記第4の傘歯車(104)と噛合する第7の傘歯車(112)と、前記第6の傘歯車(111)の軸の他端に連結された第8の傘歯車(113)と、前記第7の傘歯車(112)の軸の他端に連結された第9の傘歯車(114)と、前記第2回転軸と直交する第3回転軸の一端に連結され、前記第8の傘歯車(113)と噛合する第10の傘歯車(120)と、前記第9の傘歯車(114)と噛合し、軸が前記第10の傘歯車(121)の軸内を貫通して前記第3回転軸の一端に連結された第11の傘歯車(121)と、前記第3回転軸の他端に連結されたグリッパ(140)と、前記第11の傘歯車(121)の他端に連結され、前記グリッパ(140)を開閉する減速機構(130)とで構成されていることにより達成される。
【0010】
更に、本発明の上記目的は、第1回転軸回りに回転自在に支持され、軸の一端に第1の駆動輪(201B)が連結され、他端に第1の回転輪(201C)が連結された第1の駆動体(201)と、前記第1回転軸回りに回転自在に支持され、前記第1の駆動体(201)の軸を貫通した軸の一端に第3の駆動輪(203B)が連結され、他端に第3の回転輪(203C)が連結された第3の駆動体(203)と、前記第1回転軸回りに、前記第1の駆動体(201)及び前記第3の駆動体(203)と対向し、軸の一端に第2の駆動輪(202B)が連結され、他端に第2の回転輪(202C)が連結された第2の駆動体(202)と、前記第1回転軸回りに、前記第2の駆動体(202)の軸を貫通した軸の一端に第4の駆動輪(204B)が連結され、他端に第4の回転輪(204C)が連結された第4の駆動体(204)と、前記第1回転軸と直交して配設された第5の回転輪(210)と、回転自在に前記第5の回転輪(210)を貫通した軸の一端に連結された第6の回転輪(211)と、他端に連結された第8の回転輪(212)と、前記第5の回転輪(210)及び前記第6の回転輪(211)の軸を貫通した軸の一端に連結された第7の回転輪(213)と、他端に連結された第9の回転輪(214)と、前記第2回転軸と直交して配設された第3回転軸の一端に設けられた第10の回転輪(220)と、他端に第1の減速装置(221)を介して連結されたグリッパ(290)と、前記第10の回転輪(220)を貫通した軸の一端に設けられた第11の回転輪(230)と、前記第11の回転輪(230)の他端に設けられた第2の減速装置(231)で駆動される前記グリッパ(290)の把持部材(291,292)と、第1の方向変換用回転体(241,242)を介して、前記第1の回転輪(201C)、前記第5の回転輪(210)、前記第2の回転輪(202C)に懸架された第1の紐状部材(240)と、第2の方向変換用回転体(251)を介して、前記第3の回転輪(203C)、前記第7の回転輪(213)に懸架された第2の紐状部材(250)と、第3の方向変換用回転体(261)を介して、前記第4の回転輪(204C)、前記第6の回転輪(211)に懸架された第3の紐状部材(260)と、第4の方向変換用回転体(271)を介して、前記第9の回転輪(214)、前記第10の回転輪(220)に懸架された第4の紐状部材(270)と、第5の方向変換用回転体(281)を介して、前記第8の回転輪(212)、前記第11の回転輪(230)に懸架された第5の紐状部材(280)とで構成されていることにより達成される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
白山工業株式会社
変形量推定システム
7日前
個人
木製ハンマー
3か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
中国電力株式会社
腰袋
6か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
2か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
川崎重工業株式会社
ロボット
今日
川崎重工業株式会社
罫書用治具
5か月前
株式会社マキタ
打撃工具
20日前
学校法人立命館
グリッパ
3か月前
CKD株式会社
把持装置
3か月前
トヨタ自動車株式会社
ロボット
3か月前
オムロン株式会社
電動把持工具
2か月前
東京計器株式会社
接触検知装置
3か月前
株式会社マキタ
動力工具
6か月前
株式会社ダイヘン
制御装置
28日前
白山工業株式会社
ロボットアーム
3か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
個人
回転工具およびバリ取り部品
3か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
20日前
株式会社エビス
携帯付属物取付具
20日前
株式会社ハーモ
開閉チャック装置
4か月前
株式会社ダイヘン
搬送装置
6か月前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社マキタ
電動ハンマ
1か月前
宮川工機株式会社
板状部品移動装置
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ