TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024134471
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023044788
出願日
2023-03-20
発明の名称
搬送システム、ステーション、制御システム、配車方法、およびプログラム
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20240926BHJP(制御;調整)
要約
【課題】荷物がステーションに置かれてからの経過時間を管理することができる、搬送システム、ステーション、制御システム、配車方法、およびプログラムを提供する。
【解決手段】本発明は、ステーションと、搬送車の制御システムと、を有する搬送システムであって、前記ステーションは、前記ステーションの所定領域における荷物を検知する検知部と、前記制御システムに対して、前記検知部で前記荷物を検知した検知時刻を通知する通知部と、を備え、前記制御システムは、前記荷物を識別可能とする荷物情報と、前記検知時刻と、を紐づけた時刻管理情報を取得する時刻管理部、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ステーションと、搬送車の制御システムと、を有する搬送システムであって、
前記ステーションは、
前記ステーションの所定領域における荷物を検知する検知部と、
前記制御システムに対して、前記検知部で前記荷物を検知した検知時刻を通知する通知部と、
を備え、
前記制御システムは、
前記荷物を識別可能とする荷物情報と、前記検知時刻と、を紐づけた時刻管理情報を取得する時刻管理部、
を備える、搬送システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御システムは、
前記時刻管理情報に基づいて、前記ステーションへの前記荷物の回収に前記搬送車を配車する制御部をさらに備える請求項1に記載の搬送システム。
【請求項3】
前記時刻管理部は、前記荷物情報と、複数の前記ステーションのそれぞれから通知される前記検知時刻と、を紐づけた前記時刻管理情報を取得する、請求項1または2に記載の搬送システム。
【請求項4】
前記時刻管理情報が含む前記検知時刻から所定時間経過しても前記荷物が回収されない場合、当該荷物が回収されないことを報知する報知部を備える、請求項1に記載の搬送システム。
【請求項5】
前記時刻管理情報を表示する表示部をさらに備える、請求項1に記載の搬送システム。
【請求項6】
搬送車により回収される荷物が置かれる荷物載置部と、
前記荷物載置部に置かれた前記荷物を検知する検知部と、
搬送車の制御システムに対して、前記検知部で前記荷物を検知した検知時刻を通知する通知部と、
を備えるステーション。
【請求項7】
前記荷物載置部は、前記搬送車により前記荷物が回収される回収位置に向かって傾斜している、請求項6に記載のステーション。
【請求項8】
ステーションの所定領域における荷物を検知する検知部を有するステーションから通知される前記検知部による前記荷物の検知時刻と、前記荷物を識別可能とする荷物情報と、を紐づけた時刻管理情報を取得する時刻管理部、
を備える、制御システム。
【請求項9】
ステーションと、搬送車の制御システムと、を有する搬送システムで実行される配車方法であって、
前記ステーションは、
前記ステーションの所定領域における荷物を検知する工程と、
前記制御システムに対して、前記荷物を検知した検知時刻を通知する工程と、
を含み、
前記制御システムは、
前記荷物を識別可能とする荷物情報と、前記検知時刻と、を紐づけた時刻管理情報を取得する工程、
を含む、配車方法。
【請求項10】
コンピュータを、
ステーションの所定領域における荷物を検知する検知部を有するステーションから通知される前記検知部による前記荷物の検知時刻と、前記荷物を識別可能とする荷物情報と、を紐づけた時刻管理情報を取得する時刻管理部、
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送システム、ステーション、制御システム、配車方法、およびプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ピッキング作業者がピックした部品を入れるコンテナ等の荷物の一例の運搬手段としてコンベアを使用せず、レイアウトに柔軟性を持たせた搬送システムで荷物を搬送する手段が開発されている。特許文献1には、荷物台と、荷物台に載置された物体を搬送する走行体と、を備える搬送システムであって、荷物台は、指標を備え、走行体は、荷物台の位置を含む地図情報と、走行体の位置を示す自己位置情報と、を記憶する記憶部と、指標を検出して、指標と走行体との相対位置を示すデータを取得する環境認識部と、相対位置と地図情報とに基づいて、自己位置情報を更新する自己位置更新部と、を備える搬送システムが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら、上記の搬送システムでは、ステーションに荷物が置かれた時間が不明なため、荷物がステーションに置かれた荷物が適切に回収されないという課題がある。
【0004】
本発明は、上記に鑑みてなされたものであって、荷物がステーションに置かれてからの経過時間を管理することができる、搬送システム、ステーション、制御システム、配車方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上述した課題を解決し、目的を達成するために、本発明は、ステーションと、搬送車の制御システムと、を有する搬送システムであって、前記ステーションは、前記ステーションの所定領域における荷物を検知する検知部と、前記制御システムに対して、前記検知部で前記荷物を検知した検知時刻を通知する通知部と、を備え、前記制御システムは、前記荷物を識別可能とする荷物情報と、前記検知時刻と、を紐づけた時刻管理情報を取得する時刻管理部、を備える。
【発明の効果】
【0006】
本発明によれば、荷物がステーションに置かれてからの経過時間を管理することができる、という効果を奏する。
【図面の簡単な説明】
【0007】
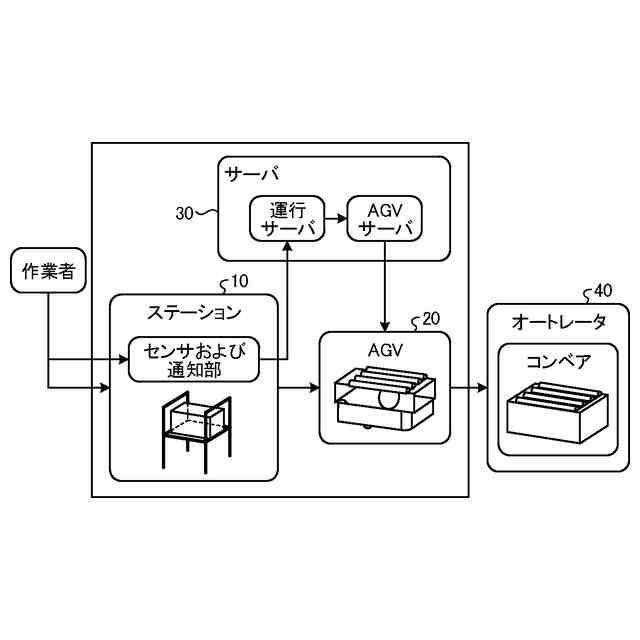
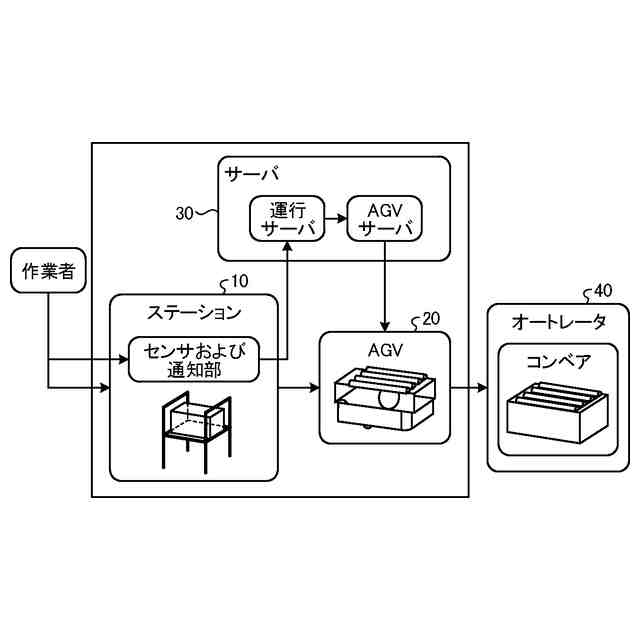
図1は、第1の実施の形態にかかるバケット搬送システムの全体構成の一例を示す図である。
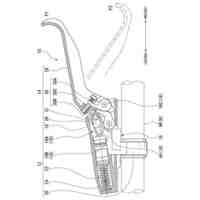
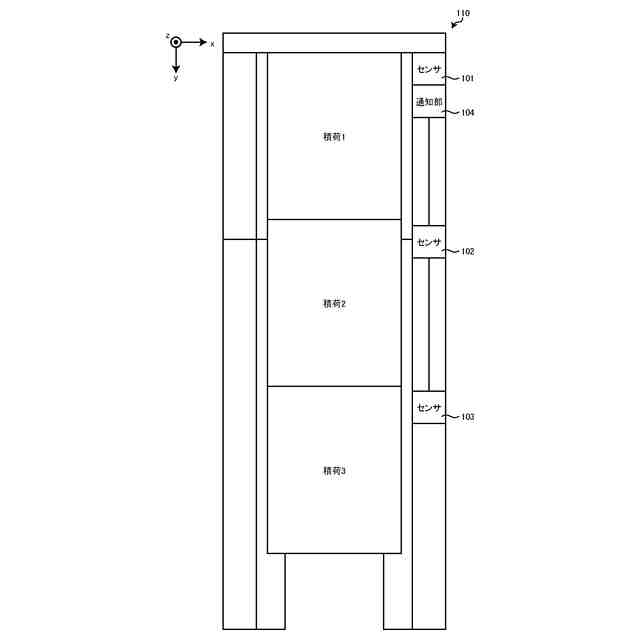
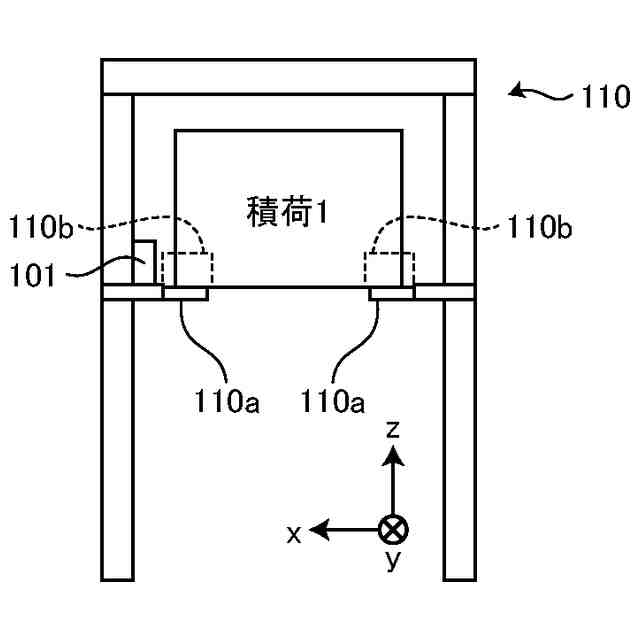
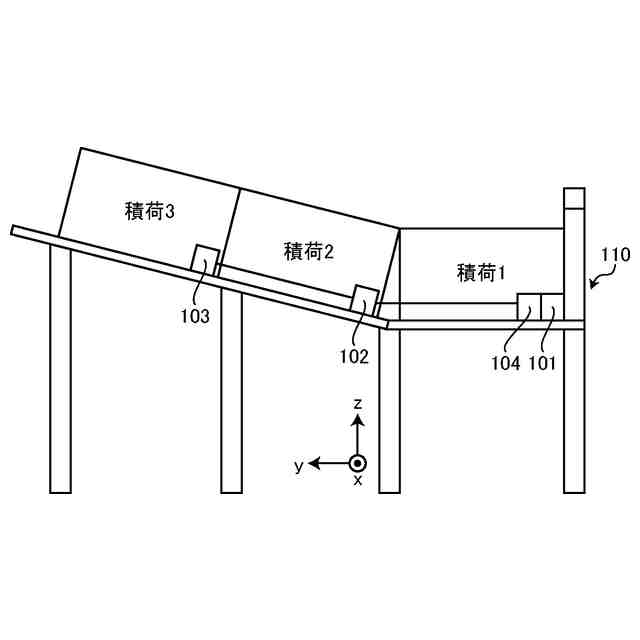
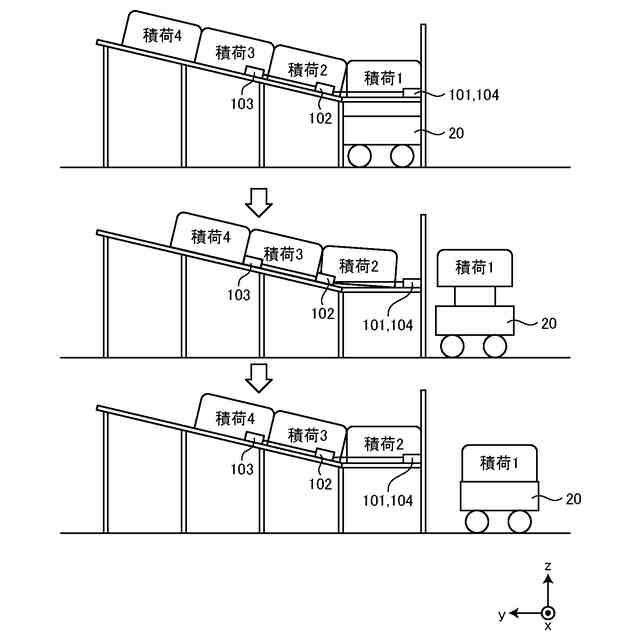
図2は、第1の実施の形態にかかるバケット搬送システムが有するステーションの構成の一例を説明するための図である。
図3は、第1の実施の形態にかかるバケット搬送システムが有するステーションの構成の一例を説明するための図である。
図4は、第1の実施の形態にかかるバケット搬送システムが有するステーションの構成の一例を説明するための図である。
図5は、第1の実施の形態にかかるバケット搬送システムが有するステーションの構成の一例を説明するための図である。
図6は、第1の実施の形態にかかるバケット搬送システムが有するステーションの構成の一例を説明するための図である。
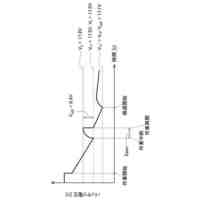
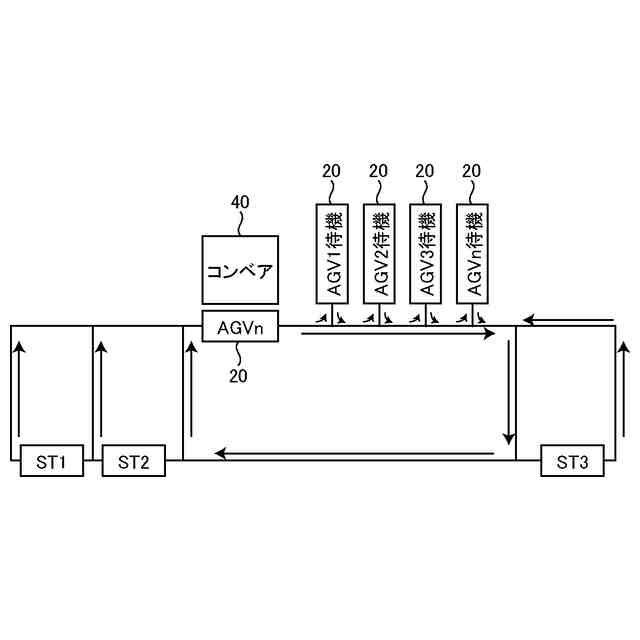
図7は、第1の実施の形態にかかるバケット搬送システムにおけるAGVの経路の一例を示す図である。
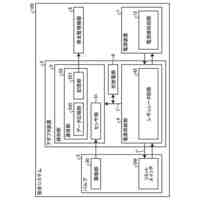
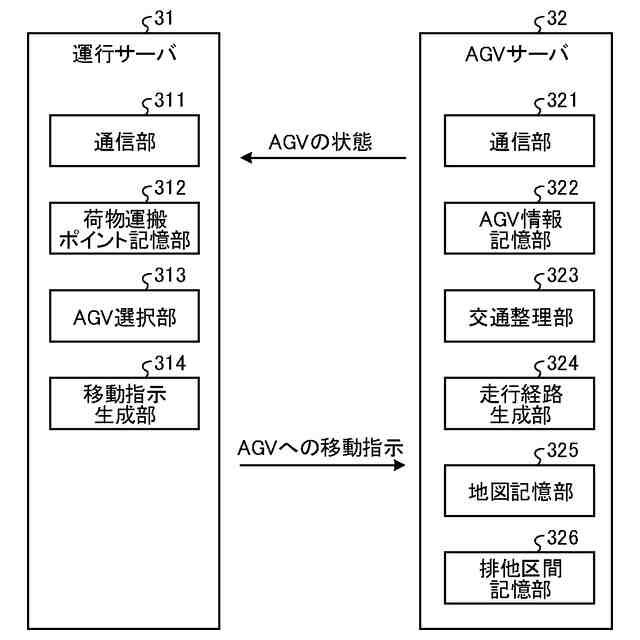
図8は、第1の実施の形態にかかるバケット搬送システムが有するサーバの機能構成の一例を示す図である。
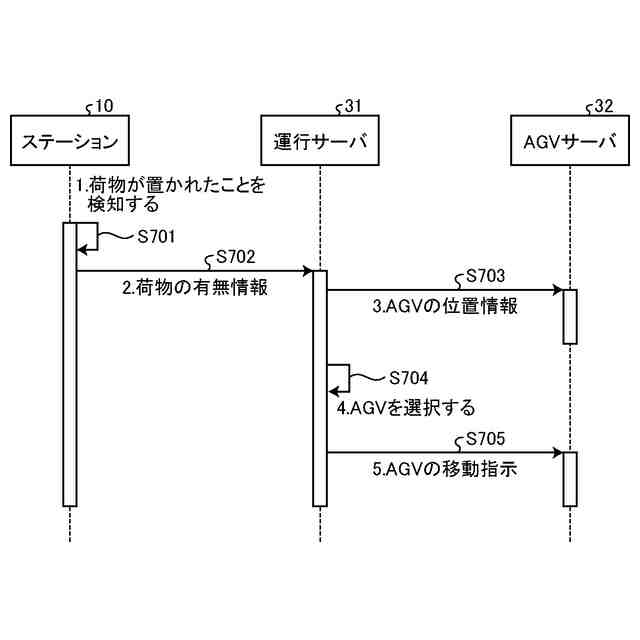
図9は、第1の実施の形態にかかるバケット搬送システムにおけるAGVのステーションへの移動処理の流れの一例を示すシーケンス図である。
図10は、第1の実施の形態にかかるバケット搬送システムにおけるステーションへのAGVの配車処理の一例を説明するための図である。
図11は、第2の実施の形態にかかるバケット搬送システムにおける通知部による検知時刻の通知処理の一例を説明するための図である。
図12は、第2の実施の形態にかかるバケット搬送システムにおける荷物IDの管理処理の一例を説明するための図である。
図13は、第2の実施の形態にかかるバケット搬送システムにおける複数のステーションのバケットに対する荷物IDの管理処理の一例を説明するための図である。
【発明を実施するための形態】
【0008】
以下に添付図面を参照して、搬送システム、ステーション、制御システム、配車方法、およびプログラムを適用したバケット搬送システムの実施の形態を詳細に説明する。
【0009】
(第1の実施の形態)
図1は、第1の実施の形態にかかるバケット搬送システムの全体構成の一例を示す図である。まず、図1を用いて、本実施の形態にかかるバケット搬送システムの全体構成の一例について説明する。
【0010】
本実施の形態にかかるバケット搬送システムは、AGV(Automatic Guided Vehicle)システムを内包したバケット(荷物の一例)の運搬(搬送)のためのシステムである。本実施の形態では、バケット搬送システムは、図1に示すように、ステーション10と、AGV20(搬送車の一例)と、サーバ30(制御システムの一例)と、オートレータ40と、を有する。すなわち、本実施の形態にかかるバケット搬送システムは、所定の走行経路に沿って走行するAGV20により、ステーション10に置かれたバケットを回収する搬送システムの一例である。ここで、所定の走行経路は、予め設定される走行経路である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
コフロック株式会社
流量制御装置
1か月前
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
1か月前
株式会社豊田自動織機
荷役車両
25日前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社シンテックホズミ
搬送ロボット
14日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
4日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
18日前
株式会社ダイフク
物品搬送設備
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
旭精機工業株式会社
監視データ処理装置
1か月前
トヨタ自動車株式会社
自律走行装置
4日前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
日本精工株式会社
制御システムおよび制御方法
4日前
ミツミ電機株式会社
電源回路及びその起動方法
4日前
ローム株式会社
半導体装置
4日前
ブラザー工業株式会社
調整方法及び数値制御装置
26日前
ローム株式会社
定電圧生成回路
18日前
株式会社FUJI
工作機械
1か月前
ローム株式会社
定電圧生成回路
1か月前
キヤノン株式会社
制御システム及び制御方法
1か月前
株式会社シマノ
人力駆動車の操作装置
25日前
株式会社マキタ
作業ロボット
1か月前
富士電機株式会社
制御システム
1か月前
アズビル株式会社
保全システム
25日前
株式会社エイトノット
情報処理システム
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ