TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024134308
公報種別
公開特許公報(A)
公開日
2024-10-03
出願番号
2023044543
出願日
2023-03-20
発明の名称
作業管理システム
出願人
株式会社島津製作所
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20240926BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】フォークリフトから得られる稼働情報のみから、フォークリフトを用いた作業の内容をより詳細に把握できるようにする。
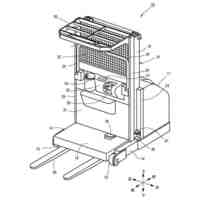
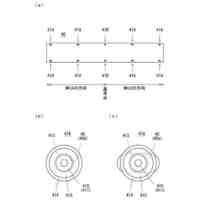
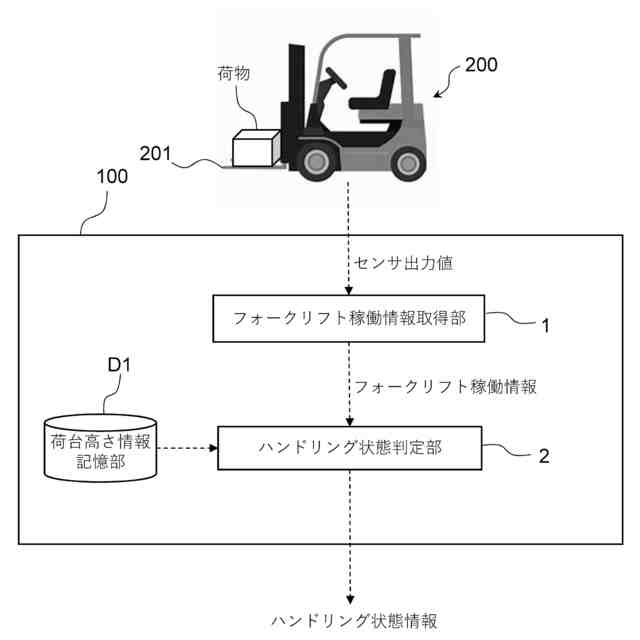
【解決手段】フォークリフト200によって積み降ろしされる荷物が載置される荷台の高さを示す荷台高さ情報を記憶している荷台高さ情報記憶部D1と、フォークリフト200のフォーク高さを示すフォーク高さ情報およびフォーク201に載せられた荷物の重量を示す荷物重量情報を取得するフォークリフト稼働情報取得部1と、荷物重量が変化したタイミングでのフォーク高さを荷台高さと比較することによって、フォークリフト200による荷物のハンドリング状態を判定するハンドリング状態判定部2とを設けた。
【選択図】図1
特許請求の範囲
【請求項1】
フォークリフトによって積み降ろしされる荷物が載置される荷台の高さを示す荷台高さ情報を記憶する荷台高さ情報記憶部と、
フォークリフトのフォーク高さを示すフォーク高さ情報およびフォークに載せられた荷物の重量を示す荷物重量情報を取得するフォークリフト稼働情報取得部と、
荷物重量が変化したタイミングでのフォーク高さを荷台高さと比較することによって、フォークリフトによる荷物のハンドリング状態を判定するハンドリング状態判定部と、を備えることを特徴とする作業管理システム。
続きを表示(約 980 文字)
【請求項2】
前記ハンドリング状態判定部は、
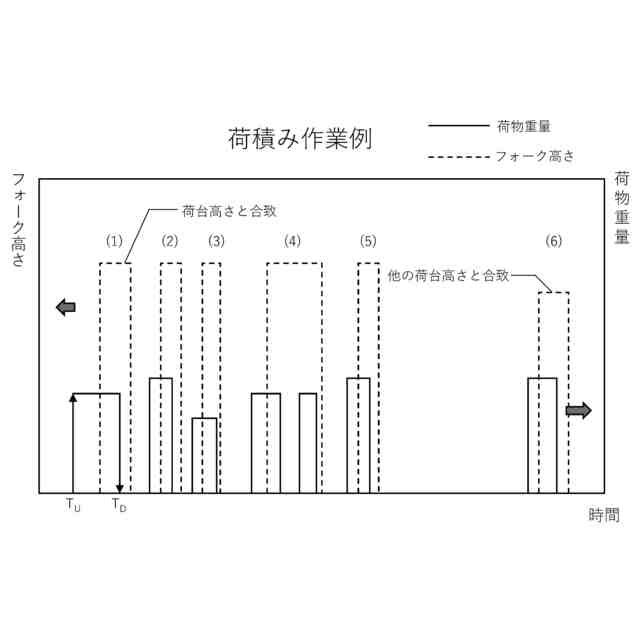
荷物重量が減少したタイミングにおけるフォーク高さが、記憶されている荷台高さに合致すると判断される場合、フォークリフトが当該荷台に荷物を積んだと判定する請求項1に記載の作業管理システム。
【請求項3】
前記ハンドリング状態判定部は、
荷物重量が増大したタイミングにおいて、フォーク高さが、記憶されている荷台高さと合致すると判断される場合、フォークリフトが当該荷台から荷物を降ろすと判定する請求項1に記載の作業管理システム。
【請求項4】
前記ハンドリング状態判定部は、
フォーク高さが、記憶されている荷台高さよりも低く、かつ、荷物重量が一定以上の状態が所定の時間を超えて継続されている場合、フォークリフトが荷物を搬送していると判定する請求項1に記載の作業管理システム。
【請求項5】
荷台高さ情報には、荷台の種類を示す荷台種類情報が紐づけられている請求項1記載の作業管理システム。
【請求項6】
荷台がトラックの荷台である請求項1記載の作業管理システム。
【請求項7】
フォークリフトによって積み降ろしされる荷物が載置される荷台の高さを示す荷台高さ情報を記憶する荷台高さ情報記憶部と、
フォークリフトのフォーク高さを示すフォーク高さ情報およびフォークに載せられた荷物の重量を示す荷物重量情報を取得するフォークリフト稼働情報取得部と、
荷物重量が変化したタイミングでのフォーク高さを荷台高さと比較することによって、フォークリフトによる荷物のハンドリング状態を判定するハンドリング状態判定部と、としての機能をコンピュータに発揮させることを特徴とする作業管理プログラム。
【請求項8】
フォークリフトによって積み降ろしされる荷物が載置される荷台の高さを示す荷台高さ情報を記憶しておき、
フォークリフトのフォーク高さを示すフォーク高さ情報およびフォークに載せられた荷物の重量を示す荷物重量情報を取得し、
荷物重量が変化したタイミングでのフォーク高さを荷台高さと比較することによって、フォークリフトによる荷物のハンドリング状態を判定することを特徴とする作業管理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フォークリフトを用いた荷物の積み降ろし作業を管理するための作業管理システム等に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、例えばウイング型トラック車両の場合、トラックに対する荷物の積み降ろし作業(荷物を積む作業および荷物を降ろす作業のこと)のほとんどまたは全部は、フォークリフトを用いて行われる。
【0003】
ところで、このような荷物の積み降ろし作業については、フォークリフト運転者やトラックドライバーが作業の開始及び終了時間を機器に手動入力などして、その作業時間を自己申告する(例えば、する)ことにより情報を得ている程度であり、客観的な作業情報が得られているとはいい難い。
【0004】
例えば、実際の荷物量はどれほどか、作業者の自己申告しているうちの実際の積み降ろし作業に要した時間や回数はどれくらいだったのかはわからない。そのため、人ごとの作業時間(効率)や、荷主ごとの荷物段取りの良さや、荷待ち時間等については作業者個々の感覚によるところが大きく、実態把握が難しく改善活動等も進めにくい状況である。
【0005】
もちろん、トラック、フォークリフトそれぞれの稼働情報を把握することは現在も進められている。
【0006】
例えばトラックには、効率的な運行管理のために、特許文献1に示すように、デジタルタコグラフのような運行管理計が搭載され、走行時間や走行速度、走行ルートなどが自動的に記録されて管理者に送信されるようになっている。
【0007】
しかしながら、フォークリフトに関していえば、その稼働状況は個別に把握できても、トラック側の稼働情報とは連携がとれていないし、また連携するためには新たなシステム構築が必要となるため、現状においては、稼働状況からそれがトラックの荷台に対する荷積みなのか、荷降ろしなのか、それ以外の荷物の積み降ろしなのか、荷物の搬送なのかなどといった荷物のハンドリング情報を把握することはできず、そのために作業効率や作業安全性の改善を進めることが難しい。
【先行技術文献】
【特許文献】
【0008】
特開2021-157819号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、上述した課題に鑑み、フォークリフトのフォーク高さに着目して初めてなされたものであって、フォークリフトから得られる稼働情報のみから、フォークリフトを用いた作業の内容をより詳細に把握できるようにすべく図ったものである。
【課題を解決するための手段】
【0010】
すなわち、本発明に係る作業管理システムは、
フォークリフトによって積み降ろしされる荷物が載置される荷台の高さを示す荷台高さ情報を記憶している荷台高さ情報記憶部と、
フォークリフトのフォーク高さを示すフォーク高さ情報およびフォークに載せられた荷物の重量を示す荷物重量情報を取得するフォークリフト稼働情報取得部と、
荷物重量が変化したタイミングでのフォーク高さを荷台高さと比較することによって、フォークリフトによる荷物のハンドリング状態を判定するハンドリング状態判定部と、を備えることを特徴とする作業管理システム。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
1か月前
ユニパルス株式会社
吊具
8か月前
ユニパルス株式会社
吊具
4か月前
ユニパルス株式会社
吊具
8か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
2か月前
ユニパルス株式会社
荷役助力装置
5か月前
株式会社日本キャリア工業
昇降機
2か月前
株式会社北川鉄工所
吊荷制御方法
7か月前
個人
建築部材の吊り上げ装置
10日前
株式会社ニシキ
可変型吊り天秤
5か月前
フジテック株式会社
エレベータ
8か月前
株式会社大林組
養生方法
28日前
フジテック株式会社
エレベータ
8か月前
大同特殊鋼株式会社
治具
6か月前
株式会社豊田自動織機
フォークリフト
3か月前
フジテック株式会社
エレベータ
9か月前
ウエダ産業株式会社
鋼板保持装置
2か月前
白山工業株式会社
腕重量補償機構
15日前
株式会社タダノ
高所作業車
15日前
ブラザー工業株式会社
架台
4か月前
フジテック株式会社
乗客搬送装置
8か月前
ブラザー工業株式会社
架台
4か月前
株式会社キトー
吊具
1か月前
小野谷機工株式会社
ジャッキ装置
3か月前
株式会社タダノ
クレーン装置
3か月前
ダイハツ工業株式会社
荷箱移動装置
4か月前
株式会社大林組
作業システム
28日前
株式会社慧泉
搬送装置
3か月前
株式会社キトー
巻上機
3か月前
イワフジ工業株式会社
グラップル装置
6か月前
株式会社豊田自動織機
産業車両
4か月前
フジテック株式会社
エレベータ
8か月前
株式会社豊田自動織機
産業車両
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ