TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024122620
公報種別
公開特許公報(A)
公開日
2024-09-09
出願番号
2023030276
出願日
2023-02-28
発明の名称
産業車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20240902BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】第1減速度制限と第2減速度制限とが干渉し合うことを抑制すること。
【解決手段】制御装置は、高揚高・重量物搬送・離席判定条件が成立した場合に第1減速度上限値を設定する第1減速度制限を実行する。制御装置は、距離条件が成立した場合に第2減速度上限値を設定する第2減速度上限値を設定する。制御装置は、高揚高・重量物搬送・離席判定条件が成立している場合、減速度上限値として第1減速度上限値を第2減速度上限値よりも優先して設定する優先制御を実行する。
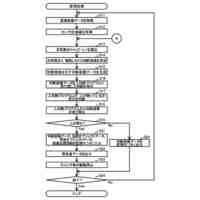
【選択図】図5
特許請求の範囲
【請求項1】
産業車両であって、
設定された減速度上限値以下の減速度で前記産業車両を減速させる制御装置と、
前記産業車両と障害物との相対距離を検知する障害物検知部と、を備え、
前記制御装置は、
前記産業車両が高揚高の状態、荷の重量が閾値以上の状態、離席の検知、のうち少なくともいずれかの場合に成立する高揚高・重量物搬送・離席判定条件が成立した場合に第1減速度上限値を設定する第1減速度制限と、
前記産業車両と前記障害物との相対距離が予め定められた距離閾値未満である場合に成立する距離条件が成立した場合に第2減速度上限値を設定する第2減速度制限と、
前記高揚高・重量物搬送・離席判定条件が成立している場合、前記減速度上限値として前記第1減速度上限値を前記第2減速度上限値よりも優先して設定する優先制御と、を実行する、産業車両。
続きを表示(約 630 文字)
【請求項2】
前記産業車両は、荷役装置を備え、
前記高揚高・重量物搬送・離席判定条件は、前記荷役装置の揚高が予め定められた揚高閾値以上であることを含む、請求項1に記載の産業車両。
【請求項3】
前記産業車両は、
表示器と、
ユーザに操作されることによってアクセルオフ時の減速度上限値、及び前記第2減速度上限値の少なくとも1つを変更可能に構成された操作部と、を備え、
前記第2減速度上限値が前記アクセルオフ時の減速度上限値より高い場合、前記制御装置は、前記表示器に注意喚起表示を行う、請求項1又は請求項2に記載の産業車両。
【請求項4】
前記制御装置は、テレマティクス端末に予め定められた衝撃閾値以上の衝撃が加わった場合に第3減速度上限値を設定する第3減速度制限を実行し、
前記優先制御は、前記距離条件が成立している場合、前記減速度上限値として前記第2減速度上限値を前記第3減速度上限値よりも優先して設定することを含む、請求項1又は請求項2に記載の産業車両。
【請求項5】
前記制御装置は、バッテリが故障した場合に第4減速度上限値を設定する第4減速度制限を実行し、
前記優先制御は、前記距離条件が成立している場合、前記減速度上限値として前記第2減速度上限値を前記第4減速度上限値よりも優先して設定することを含む、請求項1又は請求項2に記載の産業車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、産業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1に開示の産業車両は、障害物検知部と、制御装置と、を備える。障害物検知部は、産業車両と障害物との相対位置を検知する。制御装置は、障害物検知部の検知結果に応じて車速制限を行う。制御装置は、車速制限に合わせて減速度制限を行う。制御装置は、産業車両の減速度が減速度上限値以下になるように制御を行う。
【先行技術文献】
【特許文献】
【0003】
特開2021-93124号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
産業車両では、産業車両の状況に応じて種々の減速度制限が行われる場合がある。この場合、各減速度制限では、異なる減速度上限値が設定され得る。減速度制限が行われる条件が複数成立した場合、減速度制限が干渉し合うおそれがある。
【課題を解決するための手段】
【0005】
上記課題を解決する産業車両は、産業車両であって、設定された減速度上限値以下の減速度で前記産業車両を減速させる制御装置と、前記産業車両と障害物との相対距離を検知する障害物検知部と、を備え、前記制御装置は、前記産業車両が高揚高の状態、荷の重量が閾値以上の状態、離席の検知、のうち少なくともいずれかの場合に成立する高揚高・重量物搬送・離席判定条件が成立した場合に第1減速度上限値を設定する第1減速度制限と、前記産業車両と前記障害物との相対距離が予め定められた距離閾値未満である場合に成立する距離条件が成立した場合に第2減速度上限値を設定する第2減速度制限と、前記高揚高・重量物搬送・離席判定条件が成立している場合、前記減速度上限値として前記第1減速度上限値を前記第2減速度上限値よりも優先して設定する優先制御と、を実行する。
【0006】
制御装置は、高揚高・重量物搬送・離席判定条件が成立している場合、減速度上限値として第1減速度上限値を優先して設定する。このため、第1減速度制限と第2減速度制限とが干渉し合うことを抑制できる。
【0007】
上記産業車両について、前記産業車両は、荷役装置を備え、前記高揚高・重量物搬送・離席判定条件は、前記荷役装置の揚高が予め定められた揚高閾値以上であることを含んでいてもよい。
【0008】
上記産業車両について、前記産業車両は、表示器と、ユーザに操作されることによってアクセルオフ時の減速度上限値、及び前記第2減速度上限値の少なくとも1つを変更可能に構成された操作部と、を備え、前記第2減速度上限値が前記アクセルオフ時の減速度上限値より高い場合、前記制御装置は、前記表示器に注意喚起表示を行ってもよい。
【0009】
上記産業車両について、前記制御装置は、テレマティクス端末に予め定められた衝撃閾値以上の衝撃が加わった場合に前記減速度上限値として第3減速度上限値を設定する第3減速度制限を実行し、前記優先制御は、前記距離条件が成立している場合、前記減速度上限値として前記第2減速度上限値を前記第3減速度上限値よりも優先して設定することを含んでもよい。
【0010】
上記産業車両について、前記制御装置は、バッテリが故障した場合に前記減速度上限値として第4減速度上限値を設定する第4減速度制限を実行し、前記優先制御は、前記距離条件が成立している場合、前記減速度上限値として前記第2減速度上限値を前記第4減速度上限値よりも優先して設定することを含んでもよい。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
8か月前
ユニパルス株式会社
吊具
10か月前
個人
海上コンテナ昇降装置
5か月前
ユニパルス株式会社
荷役装置
4か月前
ユニパルス株式会社
吊具装置
5か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
4か月前
水戸工業株式会社
吊り具
1か月前
株式会社豊田自動織機
荷役車両
3か月前
株式会社日本キャリア工業
昇降機
8か月前
白山工業株式会社
バランサ
1か月前
ユニパルス株式会社
荷役助力装置
20日前
株式会社キトー
タイヤ用吊具
18日前
株式会社ユピテル
システム等
1か月前
個人
建築部材の吊り上げ装置
7か月前
株式会社豊田自動織機
フォークリフト
2か月前
株式会社大林組
養生方法
7か月前
フジテック株式会社
エレベータ
4か月前
新英運輸株式会社
自動車用台車
17日前
株式会社豊田自動織機
フォークリフト
10か月前
白山工業株式会社
腕重量補償機構
7か月前
ウエダ産業株式会社
鋼板保持装置
9か月前
フジテック株式会社
エスカレータ
1か月前
株式会社タダノ
高所作業車
7か月前
有限会社サエキ
玉掛用器具
5か月前
ブラザー工業株式会社
架台
10か月前
ブラザー工業株式会社
架台
10か月前
小野谷機工株式会社
ジャッキ装置
10か月前
株式会社キトー
吊具
8か月前
株式会社スギヤス
車両整備用リフト
5か月前
株式会社慧泉
搬送装置
10か月前
ダイハツ工業株式会社
荷箱移動装置
11か月前
株式会社タダノ
クレーン装置
10か月前
株式会社キトー
巻上機
10か月前
株式会社スギヤス
車両整備用リフト
5か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ