TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024121735
公報種別
公開特許公報(A)
公開日
2024-09-06
出願番号
2023028993
出願日
2023-02-27
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25F
5/00 20060101AFI20240830BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業性の良い作業機を提供する。
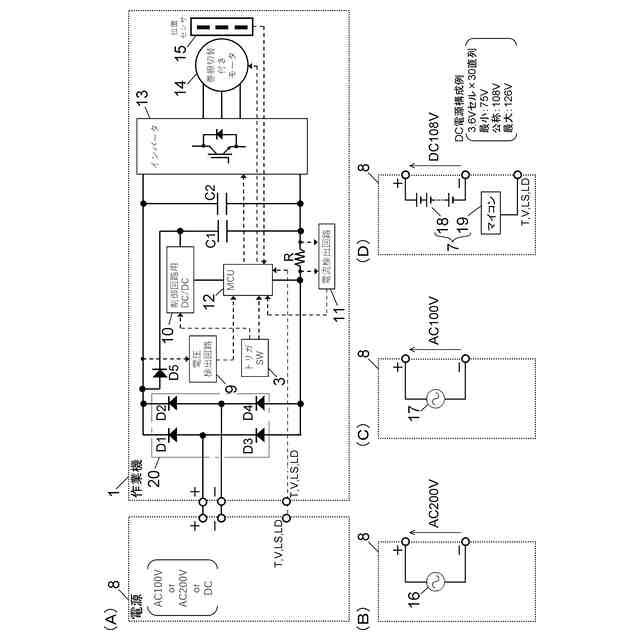
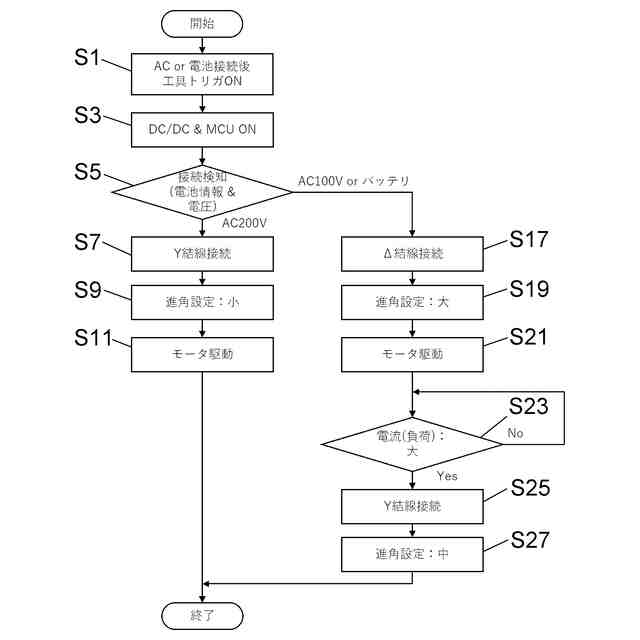
【解決手段】作業機1は、複数種類の電源、すなわち交流200V電源16、交流100V電源17、及び電池パック7(直流108V電源)のいずれによっても駆動可能である。作業機1において、制御部12は、複数種類の電源のいずれによって駆動されるかにより生じるモータ14のトルク対回転数の特性の差を抑えるように、モータ14のステータコイルの結線方式を制御するとともに、モータ14への印加電圧の進角を制御する。
【選択図】図6
特許請求の範囲
【請求項1】
複数種類の電源のいずれによっても駆動可能な作業機であって、
複数のコイルを有するモータと、
前記複数のコイルの結線方式を変更可能に構成された結線変更部と、
前記モータ及び前記結線変更部を制御する制御部と、
を備え、
前記制御部は、前記複数種類の電源のいずれによって駆動されるかにより生じる前記モータのトルク対回転数の特性の差を抑えるように前記結線変更部を制御するよう構成される、
ことを特徴とする作業機。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の作業機であって、
前記制御部は、前記特性の差を抑えるように前記モータに印加する電圧の進角を制御するよう構成される、
ことを特徴とする作業機。
【請求項3】
複数種類の電源のいずれによっても駆動可能な作業機であって、
複数のコイルを有するモータと、
前記複数のコイルの結線方式を変更可能に構成された結線変更部と、
前記モータ及び前記結線変更部を制御する制御部と、
を備え、
前記制御部は、前記複数種類の電源のいずれによって駆動されるかにより生じる前記モータのトルク対回転数の特性の差を抑えるように前記モータに印加する電圧の進角を制御するよう構成される、
ことを特徴とする作業機。
【請求項4】
請求項1又は2に記載の作業機であって、
前記複数種類の電源は、低電圧電源と高電圧電源とを含み、
前記制御部は、前記低電圧電源によって駆動される場合は前記結線方式を高回転用の第1結線方式とし、前記高電圧電源によって駆動される場合は前記結線方式を低回転用の第2結線方式とするよう前記結線変更部を制御するよう構成される、
ことを特徴とする作業機。
【請求項5】
請求項4に記載の作業機であって、
前記制御部は、前記結線方式を前記第1結線方式として前記モータを駆動している状態で前記モータにかかる負荷が結線切替条件を満たすと、前記結線方式を前記第2結線方式に切り替えるよう構成される、
ことを特徴とする作業機。
【請求項6】
請求項4に記載の作業機であって、
前記第1結線方式はデルタ結線であり、前記第2結線方式はスター結線である、
ことを特徴とする作業機。
【請求項7】
請求項2又は3に記載の作業機であって、
前記複数種類の電源は、低電圧電源と高電圧電源とを含み、
前記制御部は、前記低電圧電源によって駆動される場合は前記進角を第1進角とし、前記高電圧電源によって駆動される場合は前記進角を前記第1進角より小さい第2進角とするよう構成される、
ことを特徴とする作業機。
【請求項8】
請求項7に記載の作業機であって、
前記制御部は、前記第1進角として前記モータを駆動している状態で前記モータにかかる負荷が進角切替条件を満たすと、前記進角を前記第1進角より小さく且つ前記第2進角より大きい第3進角に切り替えるよう構成される、
ことを特徴とする作業機。
【請求項9】
請求項2に記載の作業機であって、
前記複数種類の電源は、低電圧電源と高電圧電源とを含み、
前記制御部は、前記低電圧電源によって駆動される場合は前記結線方式を高回転用の第1結線方式とし、前記高電圧電源によって駆動される場合は前記結線方式を低回転用の第2結線方式とするよう前記結線変更部を制御するよう構成され、かつ、前記低電圧電源によって駆動される場合は前記進角を第1進角とし、前記高電圧電源によって駆動される場合は前記進角を前記第1進角より小さい第2進角とするよう構成される、
ことを特徴とする作業機。
【請求項10】
請求項9に記載の作業機であって、
前記制御部は、前記結線方式を前記第1結線方式として前記モータを駆動している状態で前記モータにかかる負荷が結線切替条件を満たすと、前記結線方式を前記第2結線方式に切り替えるよう構成され、かつ、前記第1進角として前記モータを駆動している状態で前記モータにかかる負荷が進角切替条件を満たすと、前記進角を前記第1進角より小さく且つ前記第2進角より大きい第3進角に切り替えるよう構成される、
ことを特徴とする作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、電池パックと交流電源のいずれでも駆動可能な電動工具を開示する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/079725号
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数種類の電源のいずれによっても駆動可能な作業機の場合、いずれの電源によって駆動されるかによりモータのトルク対回転数の特性が大きく異なると、作業性が悪いという課題があった。
【0005】
本発明の目的は、作業性の良い作業機を提供することである。
【課題を解決するための手段】
【0006】
本発明のある態様は、作業機である。この作業機は、
複数種類の電源のいずれによっても駆動可能な作業機であって、
複数のコイルを有するモータと、
前記複数のコイルの結線方式を変更可能に構成された結線変更部と、
前記モータ及び前記結線変更部を制御する制御部と、
を備え、
前記制御部は、前記複数種類の電源のいずれによって駆動されるかにより生じる前記モータのトルク対回転数の特性の差を抑えるように前記結線変更部を制御するよう構成される、ことを特徴とする。
【0007】
本発明の別の態様は、作業機である。この作業機は、
複数種類の電源のいずれによっても駆動可能な作業機であって、
複数のコイルを有するモータと、
前記複数のコイルの結線方式を変更可能に構成された結線変更部と、
前記モータ及び前記結線変更部を制御する制御部と、
を備え、
前記制御部は、前記複数種類の電源のいずれによって駆動されるかにより生じる前記モータのトルク対回転数の特性の差を抑えるように前記モータに印加する電圧の進角を制御するよう構成される、ことを特徴とする。
【0008】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0009】
本発明によれば、作業性の良い作業機を提供することができる。
【図面の簡単な説明】
【0010】
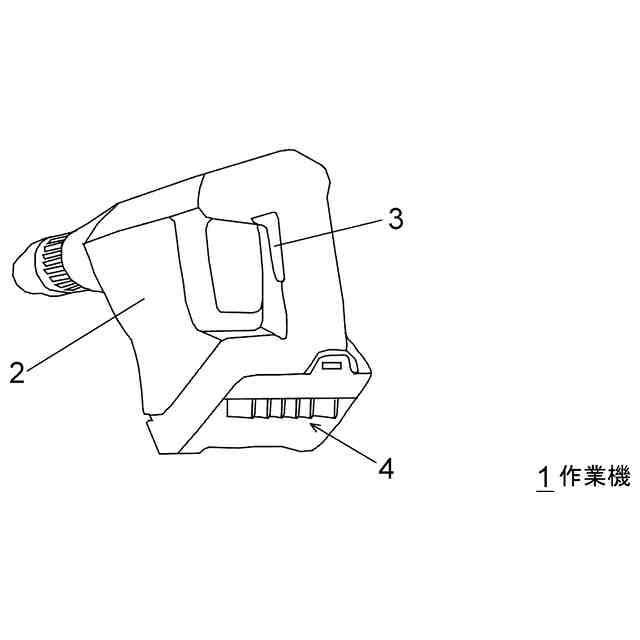
本発明の実施形態に係る作業機1の斜視図。
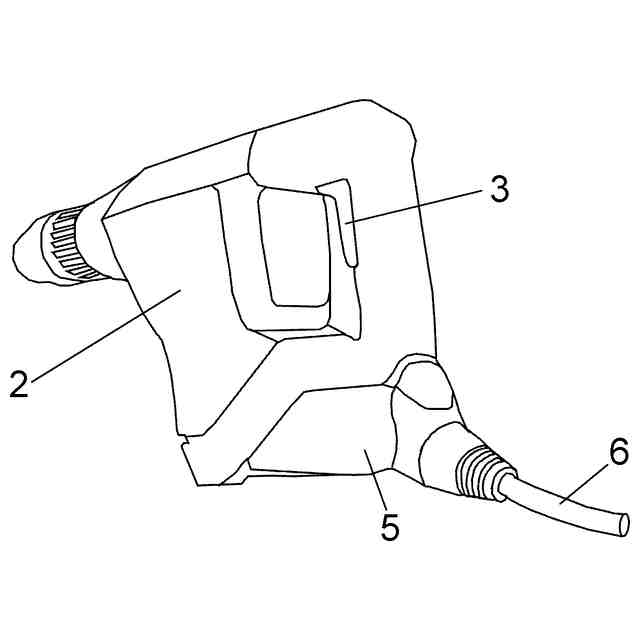
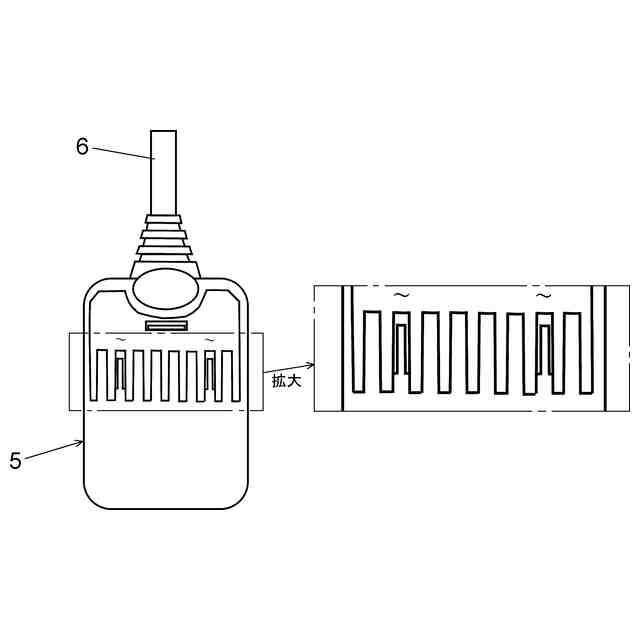
作業機1の電源接続部4に交流入力用のアダプタ5を接続した状態の斜視図。
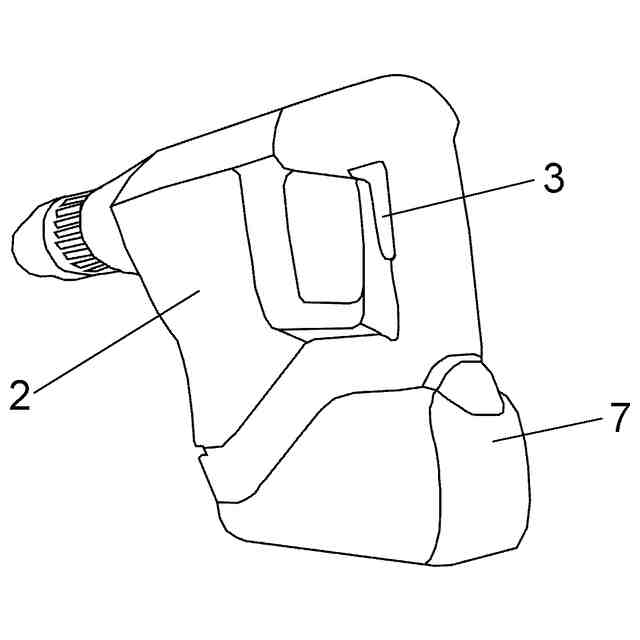
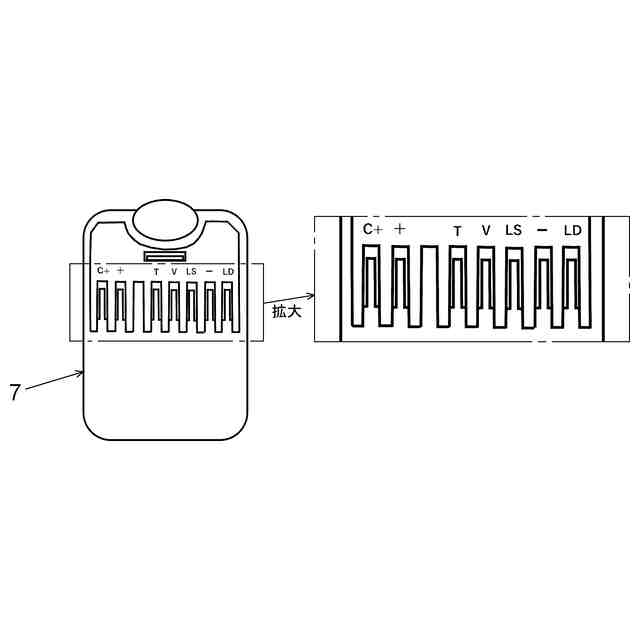
作業機1の電源接続部4に電池パック7を接続した状態の斜視図。
アダプタ5の平面図。
電池パック7の平面図。
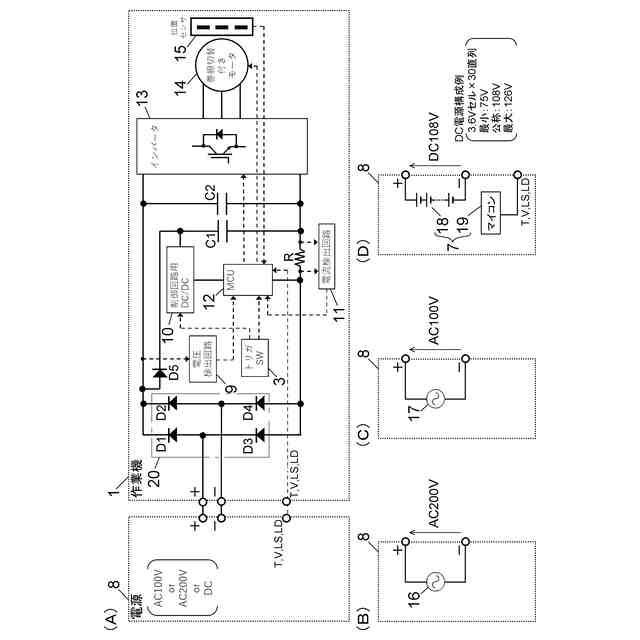
(A)は、作業機1の回路ブロック図。(B)は、図6(A)の電源8の一例である交流200V電源の回路ブロック図。(C)は、図6(A)の電源8の一例である交流100V電源の回路ブロック図。(D)は、図6(A)の電源8の一例である電池パック7の回路ブロック図。
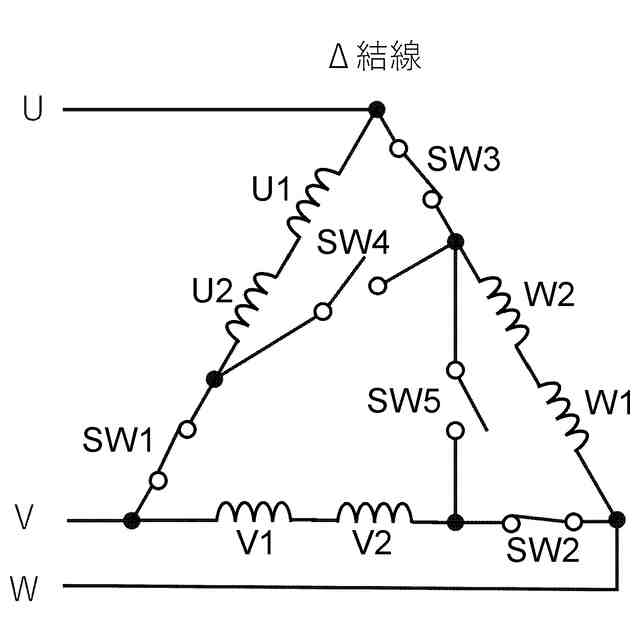
図6(A)に示すモータ14のステータコイルをデルタ結線とした場合の結線説明図。
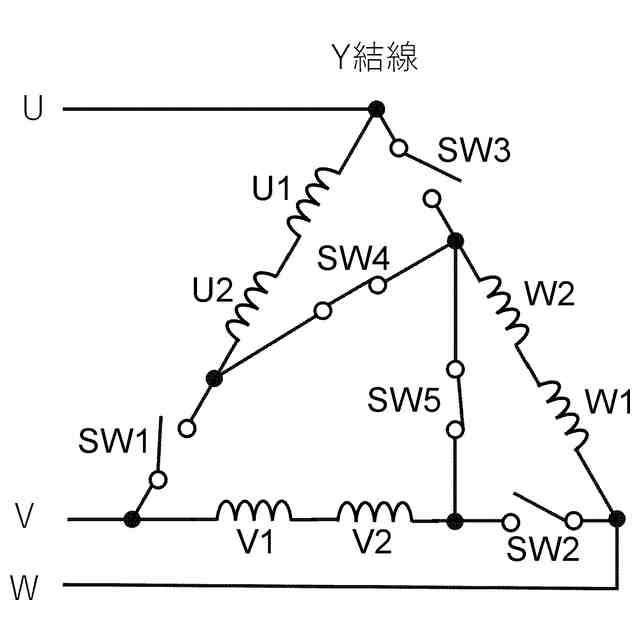
図6(A)に示すモータ14のステータコイルをスター結線(Y結線)とした場合の結線説明図。
作業機1の制御フローチャート。
作業機1の電源8の電圧、モータ14のステータコイルの結線方式、及びモータ14への印加電圧の進角の組合せに応じたモータ14のトルク対回転数の特性を示すグラフ。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
29日前
個人
関節モジュール
16日前
個人
寸切りボルト回し
12日前
個人
スロットルトリガー
26日前
個人
ねじ締め装置
9か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
7か月前
コクヨ株式会社
補助器具
6日前
株式会社ツノダ
挟持工具
5か月前
日東工器株式会社
衝撃工具
2か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
株式会社右川ゴム製造所
把持装置
5か月前
川崎重工業株式会社
ハンド
7か月前
個人
ロボットシステム
9か月前
個人
メンテナンス用スタンド
2か月前
東京計器株式会社
接触検知装置
1か月前
川崎重工業株式会社
罫書用治具
3か月前
CKD株式会社
把持装置
26日前
株式会社不二越
ロボット
9か月前
トヨタ自動車株式会社
関節機構
9か月前
学校法人立命館
グリッパ
19日前
学校法人立命館
グリッパ
6か月前
トヨタ自動車株式会社
関節機構
9か月前
学校法人立命館
ロボットハンド
6か月前
株式会社マキタ
動力工具
3か月前
オムロン株式会社
電動把持工具
5日前
トヨタ自動車株式会社
ロボット
1か月前
株式会社ダイヘン
搬送装置
3か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
株式会社ハーモ
開閉チャック装置
1か月前
白山工業株式会社
ロボットアーム
23日前
個人
プーリーキー抜き治具
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































