TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024118901
公報種別
公開特許公報(A)
公開日
2024-09-02
出願番号
2023025473
出願日
2023-02-21
発明の名称
生成装置、生成方法、及び生成プログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
9/16 20060101AFI20240826BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多様な対象物の姿勢を精度良く位置決めすることができる生成装置、生成方法、及び生成プログラムを得る。
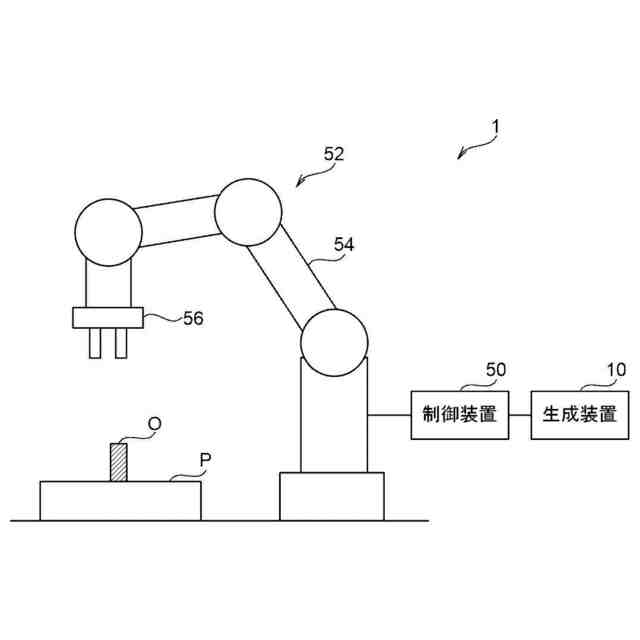
【解決手段】生成装置は、ロボットの把持部により対象物を把持する第1の動作、把持部により把持された対象物を支持面に置く第2の動作、及び把持部により対象物を押す第3の動作のうちの少なくとも1つの動作の2つ以上の組合せからなる動作列であって、対象物の位置決めを行うための動作列を生成する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットの把持部により対象物を把持する第1の動作、前記把持部により把持された前記対象物を支持面に置く第2の動作、及び前記把持部により前記対象物を押す第3の動作のうちの少なくとも1つの動作の2つ以上の組合せからなる動作列であって、前記対象物の位置決めを行うための動作列を生成する生成部
を含む生成装置。
続きを表示(約 880 文字)
【請求項2】
前記動作列の候補に含まれる各動作を行ったと仮定した場合の各動作後の前記対象物の姿勢及び、その姿勢の不確実性を推定する推定部をさらに含み、
前記生成部は、各動作を順次行うたびに前記推定部により推定された姿勢の不確実性が減少する動作列を生成する
請求項1に記載の生成装置。
【請求項3】
前記推定部は、前記不確実性を表すスコアを算出し、
前記生成部は、異なる複数の動作列の候補の中から、最終的な前記スコアが最小となる動作列を選択することによって動作列を生成する
請求項2に記載の生成装置。
【請求項4】
前記第3の動作において、前記把持部が前記対象物に接触する2点以上の点を結ぶ線分又は面に対して、前記対象物の重心から引いた垂線が前記線分内又は前記面内に位置することを条件とする
請求項1から請求項3の何れか1項に記載の生成装置。
【請求項5】
前記生成部は、1つの動作列の中に同じ動作を含む場合、その同じ動作の間では動作条件を異ならせる
請求項1から請求項3の何れか1項に記載の生成装置。
【請求項6】
ロボットの把持部により対象物を把持する第1の動作、前記把持部により把持された前記対象物を支持面に置く第2の動作、及び前記把持部により前記対象物を押す第3の動作のうちの少なくとも1つの動作の2つ以上の組合せからなる動作列であって、前記対象物の位置決めを行うための動作列を生成する
ことを含む処理をコンピュータが実行する生成方法。
【請求項7】
コンピュータを、
ロボットの把持部により対象物を把持する第1の動作、前記把持部により把持された前記対象物を支持面に置く第2の動作、及び前記把持部により前記対象物を押す第3の動作のうちの少なくとも1つの動作の2つ以上の組合せからなる動作列であって、前記対象物の位置決めを行うための動作列を生成する生成部
として機能させるための生成プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、生成装置、生成方法、及び生成プログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、把持部を備えるロボットであって、把持部により対象物を把持し、対象物を組み立てる作業等を行うロボットに関する技術が提案されている。
【0003】
例えば、特許文献1には、作業対象物の複数の作業部位のうちの一部の作業部位に対して、センサにより得られた計測値に基づいて、エンドエフェクタを移動させることにより一部の作業部位に位置決めして作業させるロボット装置が開示されている。このロボット装置は、位置決めしたエンドエフェクタの位置姿勢を基準位置姿勢として設定する。また、このロボット装置は、複数の作業部位のうちの一部の作業部位以外の残部の作業部位に対して、基準位置姿勢から次の作業部位までのオフセット量を算出する。また、このロボット装置は、エンドエフェクタを基準位置姿勢からオフセット量だけずらした位置姿勢に移動させることにより残部の作業部位に位置決めして作業させる。
【0004】
また、特許文献2には、環境内で、物体を保持しているロボットの手を動かすステップと、所定の時点に、物体を保持しているロボットの手の中の姿勢を、先の相互作用情報に基づいて推定するステップとを含む方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2015-000455号公報
WO2021/048598A1
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ロボットによる組み立て作業において、ロボットが備える把持部により対象物の適切な箇所を把持し、精度良く作業を行うためには、対象物の姿勢を精度良く位置決めすることが求められる。
【0007】
しかしながら、特許文献1及び特許文献2に記載の技術では、対象物の形状が限定されてしまい、多様な対象物の姿勢を精度良く位置決めできない場合がある。
【0008】
本開示は、上記の点に鑑みてなされたものであり、多様な対象物の姿勢を精度良く位置決めすることができる生成装置、生成方法、及び生成プログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本開示に係る生成装置は、ロボットの把持部により対象物を把持する第1の動作、前記把持部により把持された前記対象物を支持面に置く第2の動作、及び前記把持部により前記対象物を押す第3の動作のうちの少なくとも1つの動作の2つ以上の組合せからなる動作列であって、前記対象物の位置決めを行うための動作列を生成する生成部を含む。
【0010】
また、本開示に係る生成方法は、ロボットの把持部により対象物を把持する第1の動作、前記把持部により把持された前記対象物を支持面に置く第2の動作、及び前記把持部により前記対象物を押す第3の動作のうちの少なくとも1つの動作の2つ以上の組合せからなる動作列であって、前記対象物の位置決めを行うための動作列を生成することを含む処理をコンピュータが実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
1か月前
個人
関節モジュール
17日前
個人
寸切りボルト回し
13日前
個人
スロットルトリガー
27日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
4か月前
株式会社ツノダ
挟持工具
5か月前
太陽工業株式会社
チャック装置
今日
株式会社ツノダ
挟持工具
7か月前
コクヨ株式会社
補助器具
7日前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
衝撃工具
2か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
動力工具
1か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
6か月前
CKD株式会社
把持装置
27日前
川崎重工業株式会社
罫書用治具
3か月前
学校法人立命館
グリッパ
20日前
学校法人立命館
ロボットハンド
6か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社マキタ
動力工具
3か月前
オムロン株式会社
電動把持工具
6日前
個人
回転工具およびバリ取り部品
1か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
白山工業株式会社
ロボットアーム
24日前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
個人
プーリーキー抜き治具
6か月前
トヨタ自動車株式会社
ハンド構造
3か月前
川崎重工業株式会社
ロボット
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































