TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024118194
公報種別
公開特許公報(A)
公開日
2024-08-30
出願番号
2023024485
出願日
2023-02-20
発明の名称
ロボットシステム、キャリブレーションツール、及びキャリブレーション方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
H01L
21/677 20060101AFI20240823BHJP(基本的電気素子)
要約
【課題】キャリブレーションを容易に行うことができるロボットシステムを提供する。
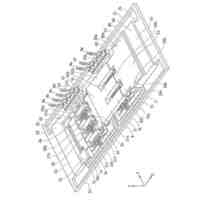
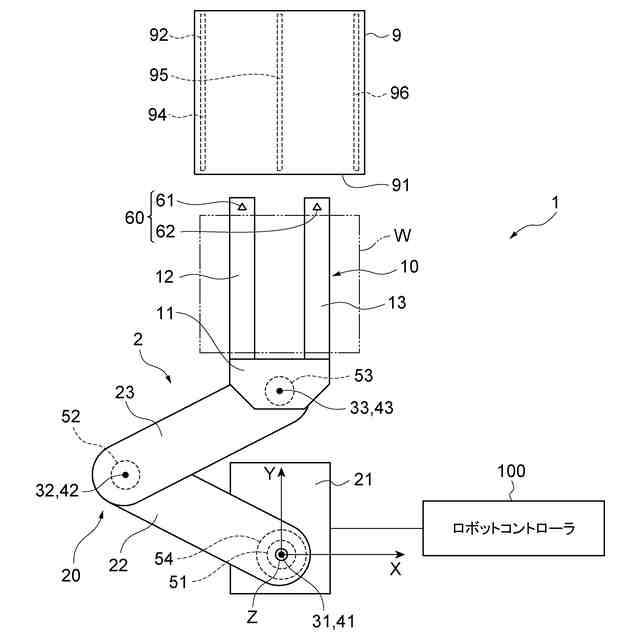
【解決手段】ロボットシステム1は、基板Wをハンド10により支持して搬送するロボット2と、基板Wの代わりに配置可能なターゲット320,420と、ハンド10に設けられ、ターゲット320,420に対向し非接触でターゲット320,420を検出するセンサ60と、第1方向に沿ってターゲット320,420に対向したセンサ60の検出結果と、センサ60の位置とに基づいて、第1方向におけるターゲット320,420の位置を検出する第1検出部113と、第1方向に垂直な第2方向に沿ってセンサ60を移動させるようにロボット2を制御し、第2方向に沿った移動によるセンサ60の検出結果の変化と、センサ60の位置とに基づいて、第2方向におけるターゲット320,420の位置を検出する第2検出部114と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
基板をハンドにより支持して搬送するロボットと、
前記ロボットによる搬送前又は搬送後の前記基板が配置される基板支持部に、前記基板の代わりに配置可能なターゲットと、
前記ハンドに設けられ、前記ターゲットに対向し非接触で前記ターゲットを検出するセンサと、
第1方向に沿って前記センサを前記ターゲットに対向させるように前記ロボットを制御し、前記第1方向に沿って前記ターゲットに対向した前記センサの検出結果と、前記センサの位置とに基づいて、前記第1方向における前記ターゲットの位置を検出する第1検出部と、
前記第1方向に垂直な第2方向に沿って前記センサを移動させるように前記ロボットを制御し、前記第2方向に沿った移動による前記センサの検出結果の変化と、前記センサの位置とに基づいて、前記第2方向における前記ターゲットの位置を検出する第2検出部と、
を備えるロボットシステム。
続きを表示(約 1,600 文字)
【請求項2】
前記第2検出部は、前記第1検出部により前記第1方向における前記ターゲットの位置が検出された後に、前記第2方向に沿って前記センサを移動させるように前記ロボットを制御する、
請求項1記載のロボットシステム。
【請求項3】
前記第2検出部は、
前記第2方向に沿った移動による前記センサの検出結果の変化に基づいて、前記ターゲットのアウトラインを認識し、
前記アウトラインを認識した際の前記センサの位置に基づいて、前記第2方向における前記ターゲットの位置を検出する、
請求項1記載のロボットシステム。
【請求項4】
前記第1方向に沿って前記ターゲットと対向する視点から見て、前記アウトラインは、互いに非平行でそれぞれが前記第2方向に交差する第1ラインと第2ラインとを有し、
前記第2検出部は、
前記第2方向に沿って移動する前記センサの検出結果に基づいて前記第1ラインと前記第2ラインとを認識し、
前記第1ラインを認識した際の前記センサの位置と、前記第2ラインを認識した際の前記センサの位置とに基づいて、前記第1方向と前記第2方向とに垂直な第3方向における前記ターゲットの位置を更に検出する、
請求項3記載のロボットシステム。
【請求項5】
前記第1検出部と、前記第2検出部とは、同一の平面に沿って前記センサを移動させるように前記ロボットを制御する、
請求項4記載のロボットシステム。
【請求項6】
前記第1方向及び前記第2方向はいずれも水平であり、
前記第1検出部と、前記第2検出部とは、水平な前記平面に沿って前記センサを移動させるように前記ロボットを制御する、
請求項5記載のロボットシステム。
【請求項7】
前記第1検出部と、前記第2検出部とは、前記第1方向における前記ターゲットの位置を検出するための前記センサの移動パスと、前記第2方向における前記ターゲットの位置を検出するための前記センサの移動パスとが連続するように前記ロボットを制御する、
請求項6記載のロボットシステム。
【請求項8】
前記ターゲットは、前記第2方向に沿って並び、それぞれが前記第1方向に交差する第1表面と第2表面とを有し、
前記第1ラインと前記第2ラインとは、前記第1表面と前記第2表面との間に位置している、
請求項4記載のロボットシステム。
【請求項9】
前記ロボットは、前記ハンドに接続された多関節アームを有し、
前記多関節アームは、
前記第1方向における前記ハンドの位置と、
前記第2方向における前記ハンドの位置と、
前記第1方向及び前記第2方向に垂直な軸線まわりの前記ハンドの姿勢と、
を1以上の関節の回転により変更し得るように構成されている、
請求項1~8のいずれか一項記載のロボットシステム。
【請求項10】
前記センサは、前記ターゲットまでの距離が所定距離よりも大きい場合には第1信号を出力し、前記ターゲットまでの距離が前記所定距離よりも小さい場合には第2信号を出力するように構成されており、
前記第1検出部は、
前記所定距離よりも大きい距離にて前記センサを前記ターゲットに対向させた後、前記第1方向に沿って前記センサを前記ターゲットに近付けるように前記ロボットを制御し、
前記センサの出力が前記第1信号から前記第2信号に切り替わったときの前記センサの位置に基づいて、前記第1方向における前記ターゲットの位置を検出する、
請求項1~8のいずれか一項記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム、キャリブレーションツール、及びキャリブレーション方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1には、ワークピースハンドリングロボットをステーションに対して校正するロボット校正装置が開示されている。ワークピースハンドリングロボットは、エンドエフェクタに取り付けられたセンサを含む。ロボット校正装置は、目標物を含む。目標物の片側には黒の領域と白の領域とを含むパターンが設けられる。ロボット校正装置は、エンドエフェクタを移動させ、センサは黒の領域と白の領域との切り替わりに基づいて目標物の中心を決定する。
【先行技術文献】
【特許文献】
【0003】
特表2004-536443号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、キャリブレーションを容易に行うことができるロボットシステムを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットシステムは、基板をハンドにより支持して搬送するロボットと、ロボットによる搬送前又は搬送後の基板が配置される基板支持部に、基板の代わりに配置可能なターゲットと、ハンドに設けられ、ターゲットに対向し非接触でターゲットを検出するセンサと、第1方向に沿ってセンサをターゲットに対向させるようにロボットを制御し、第1方向に沿ってターゲットに対向したセンサの検出結果と、センサの位置とに基づいて、第1方向におけるターゲットの位置を検出する第1検出部と、第1方向に垂直な第2方向に沿ってセンサを移動させるようにロボットを制御し、第2方向に沿った移動によるセンサの検出結果の変化と、センサの位置とに基づいて、第2方向におけるターゲットの位置を検出する第2検出部と、を備える。
【0006】
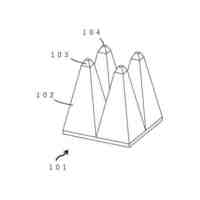
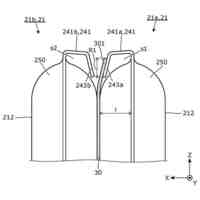
本開示の他の側面に係るキャリブレーションツールは、基板をハンドにより支持し、水平な第1方向に沿って基板収容部に出し入れするロボットのハンドに設けられ、ターゲットに対向し非接触でターゲットを検出するセンサの検出結果に基づいて、ロボットと基板収容部との位置関係を特定するためのキャリブレーションツールであって、第1方向に沿って基板の代わりに基板収容部に出し入れ可能なターゲットベースと、ターゲットベースが基板収容部に収容された状態にて、基板収容部の外からセンサにより検出可能な位置に配置されるようにターゲットベースに設けられたターゲットと、を備え、第1方向に沿ってターゲットと対向する視点から見て、ターゲットのアウトラインは、互いに非平行でそれぞれが水平方向に交差する第1ラインと第2ラインとを有する。
【0007】
本開示の更に他の側面に係るキャリブレーション方法は、基板をハンドにより支持して搬送するロボットのハンドに設けられたセンサの検出結果に基づいて、ロボットによる搬送前又は搬送後の基板が配置される基板支持部と、ロボットとの位置関係を特定する方法であって、基板支持部にターゲットを配置することと、第1方向に沿ってセンサを非接触でターゲットに対向させるようにロボットを制御し、第1方向に沿って非接触でターゲットに対向したセンサの検出結果と、センサの位置とに基づいて、第1方向におけるターゲットの位置を検出することと、第1方向に垂直な第2方向に沿ってセンサを移動させるようにロボットを制御し、第2方向に沿った移動によるセンサの検出結果の変化と、センサの位置とに基づいて、第2方向におけるターゲットの位置を検出することと、を含む。
【発明の効果】
【0008】
本開示によれば、キャリブレーションを容易に行うことができるロボットシステムを提供することができる。
【図面の簡単な説明】
【0009】
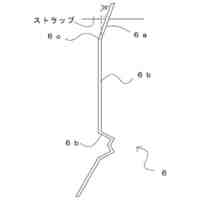
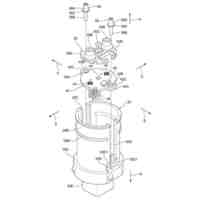
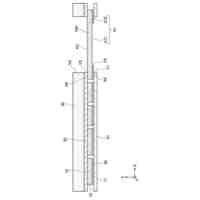
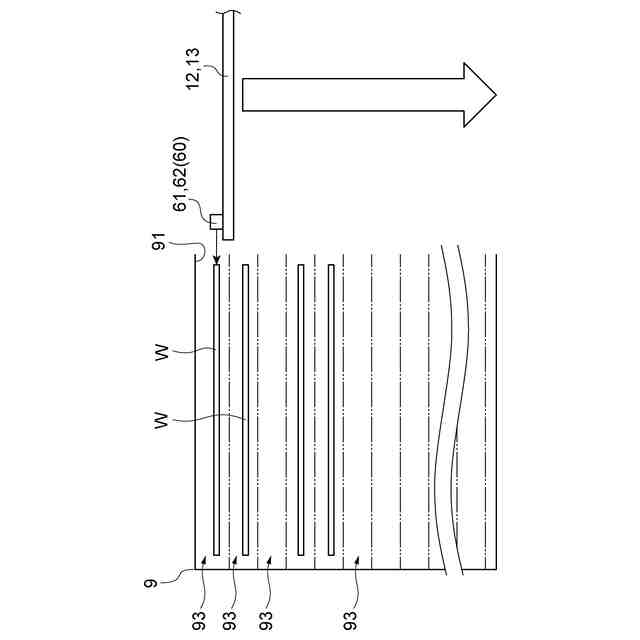
ロボットシステムの構成を例示する模式図である。
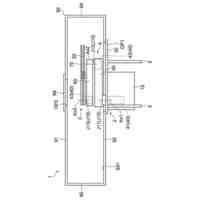
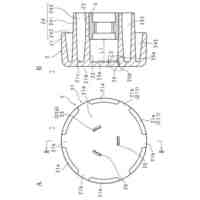
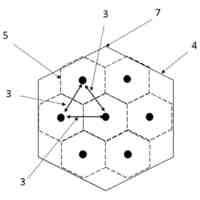
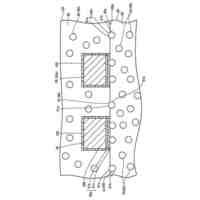
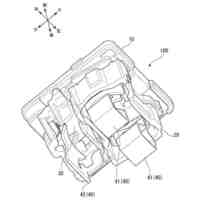
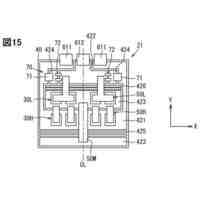
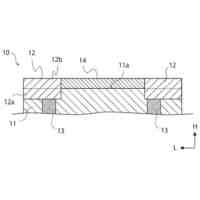
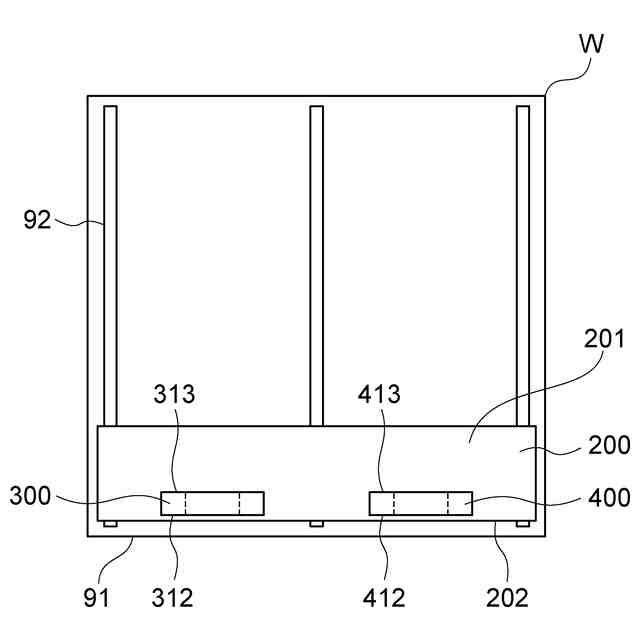
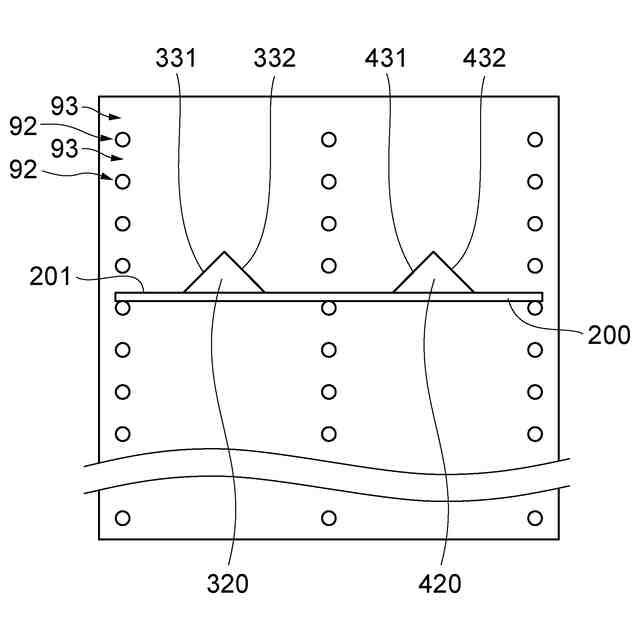
基板支持部に配置されたキャリブレーションツールの正面図である。
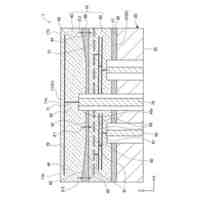
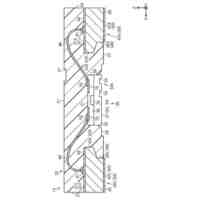
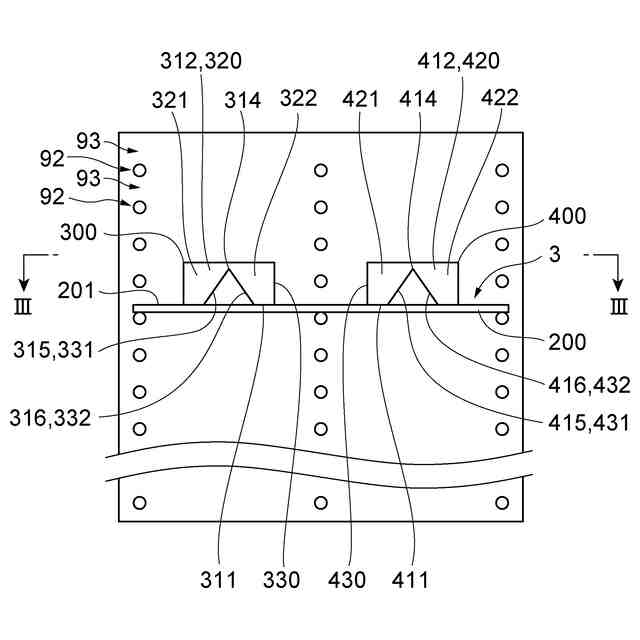
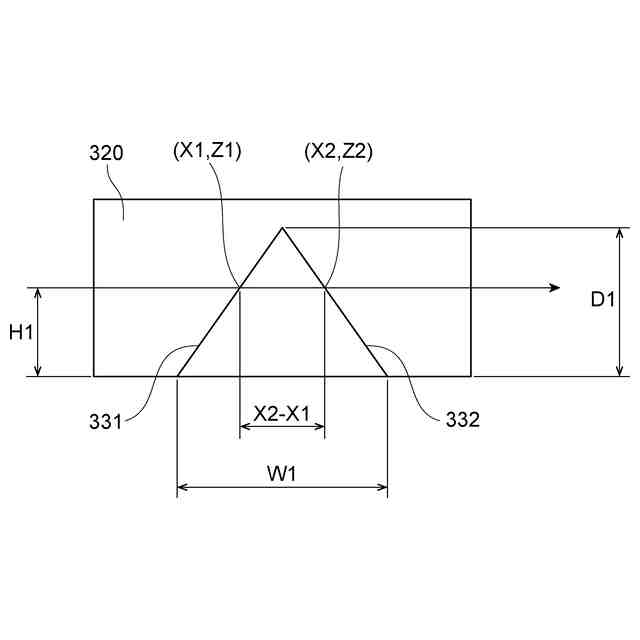
図2中のIII-III線に沿う断面図である。
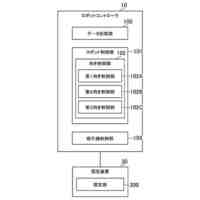
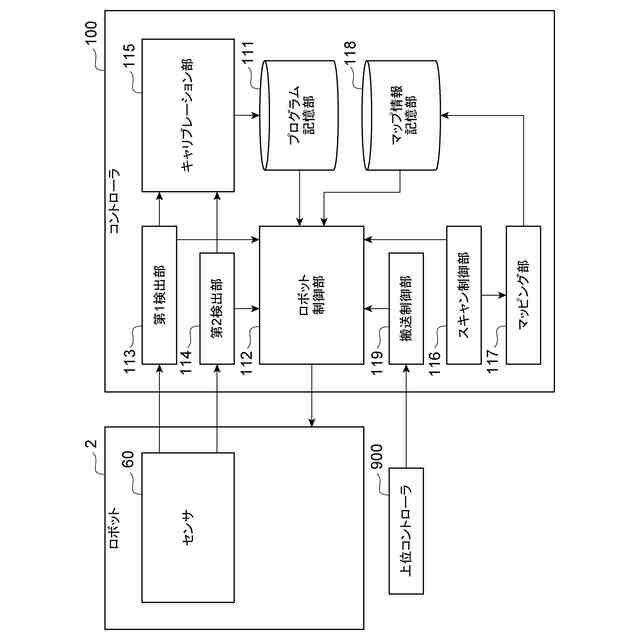
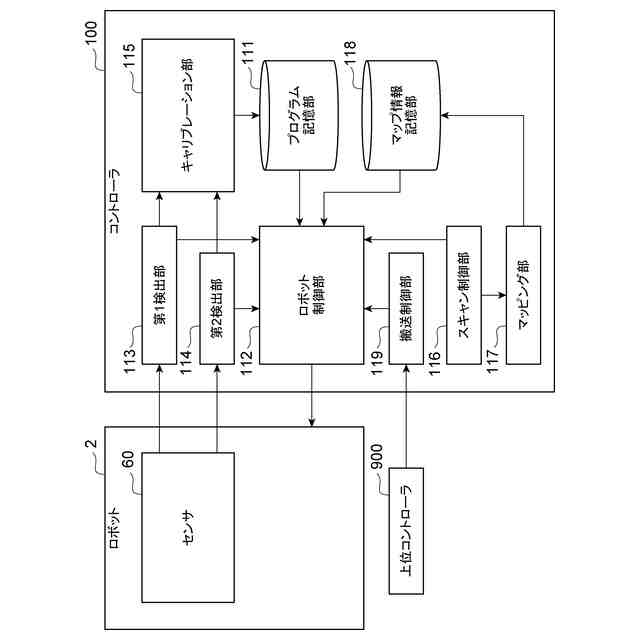
ロボットコントローラの機能的な構成を例示するブロック図である。
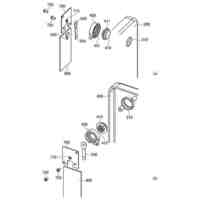
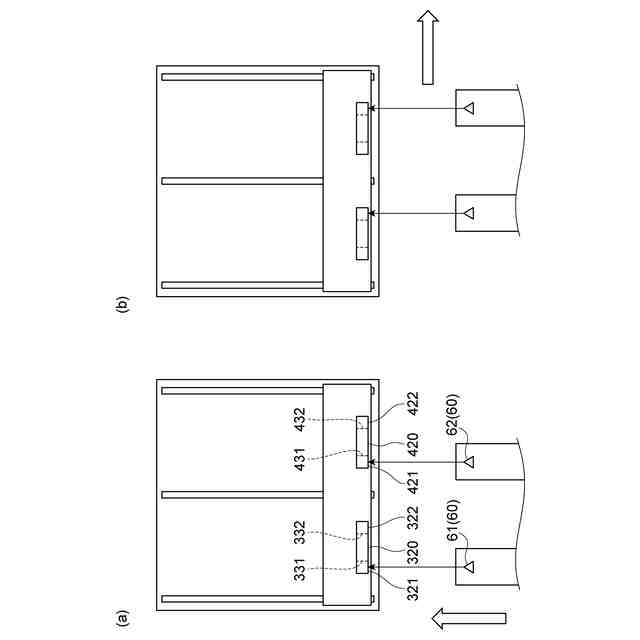
キャリブレーションのための2の動作を例示する模式図である。
第1ライン及び第2ラインの認識結果とセンサの高さとの関係を表す模式図である。
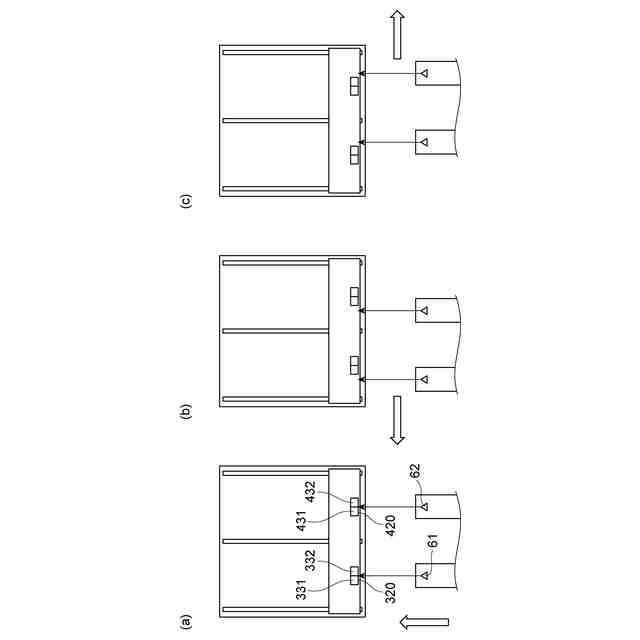
スキャン制御による2の動作を例示する模式図である。
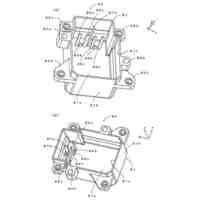
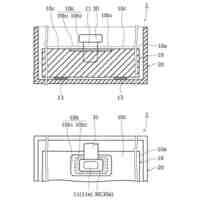
キャリブレーションツールの変形例を示す小メンズである。
図8のキャリブレーションツールに対応する2の動作を例示する模式図である。
1のセンシング部によりキャリブレーションを行うための動作を例示する模式図である。
1のセンシング部によりキャリブレーションを行うための動作の変形例を示す模式図である。
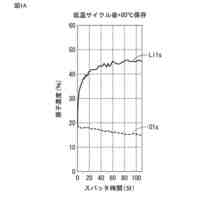
1のセンシング部によりキャリブレーションを行うための動作の変形例を示すグラフである。
ロボットコントローラのハードウェア構成を例示するブロック図である。
キャリブレーション手順を例示するフローチャートである。
キャリブレーション手順を例示するフローチャートである。
マッピング手順を例示するフローチャートである。
搬送手順を例示するフローチャートである。
【発明を実施するための形態】
【0010】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
13日前
株式会社安川電機
ロボット
13日前
株式会社安川電機
ロボット
13日前
株式会社安川電機
ロボット及び基板搬送装置
13日前
株式会社安川電機
ロボットシステム及びロボット制御方法
13日前
株式会社安川電機
ロボット制御システム及び梱包資材の切断方法
11日前
株式会社安川電機
ロボット制御システム、ロボット制御方法、及びプログラム
24日前
個人
電波吸収体
16日前
個人
テーブルタップ
13日前
三洋化成工業株式会社
軟磁性材料
3日前
キヤノン株式会社
電子機器
13日前
古河電池株式会社
制御弁式鉛蓄電池
9日前
株式会社ヨコオ
同軸コネクタ
9日前
株式会社ダイヘン
碍子
18日前
株式会社GSユアサ
蓄電装置
13日前
株式会社GSユアサ
蓄電装置
13日前
株式会社ユーシン
スイッチ装置
13日前
株式会社ユーシン
スイッチ装置
13日前
個人
六角形パネル展開アレーアンテナ
13日前
日本特殊陶業株式会社
保持装置
3日前
株式会社半導体エネルギー研究所
電池
2日前
イビデン株式会社
プリント配線板
16日前
三洲電線株式会社
撚線導体
3日前
TDK株式会社
コイル部品
9日前
住友電装株式会社
コネクタ
9日前
ローム株式会社
半導体装置
13日前
富士電機株式会社
半導体装置
13日前
大和電器株式会社
コンセント
9日前
株式会社デンソー
半導体装置
13日前
三洋化成工業株式会社
リチウムイオン電池
3日前
ニチコン株式会社
コンデンサ
9日前
日産自動車株式会社
電子機器
16日前
株式会社村田製作所
二次電池
16日前
オムロン株式会社
リード線整列治具
13日前
太陽誘電株式会社
コイル部品
13日前
日本圧着端子製造株式会社
コネクタ
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ