TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024118097
公報種別
公開特許公報(A)
公開日
2024-08-30
出願番号
2023024301
出願日
2023-02-20
発明の名称
把持装置
出願人
株式会社栗本鐵工所
代理人
KEY弁理士法人
主分類
B25J
15/08 20060101AFI20240823BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来の把持装置よりも、精密に把持力を調整または制御することが可能となる把持装置を提供する。
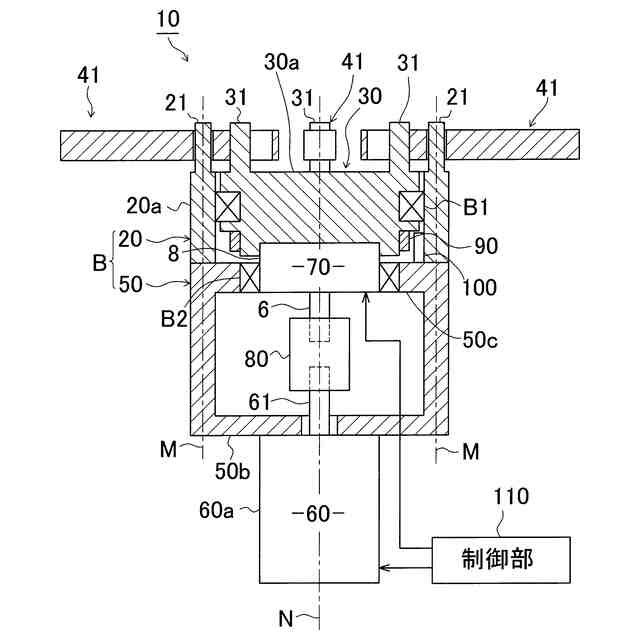
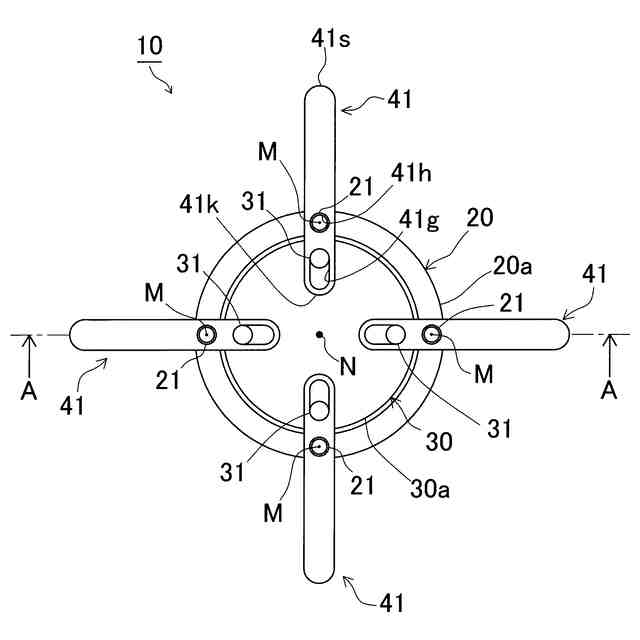
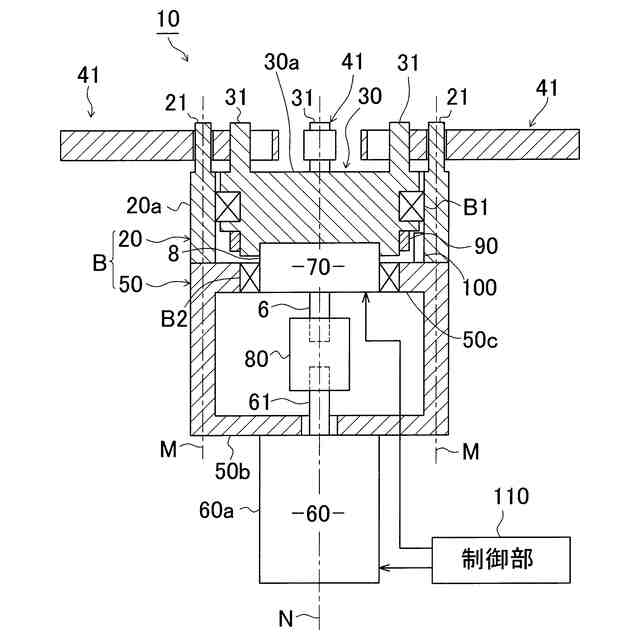
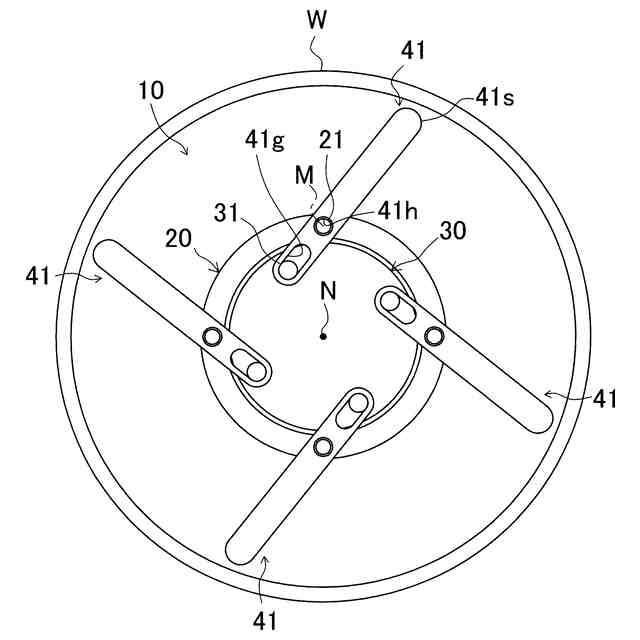
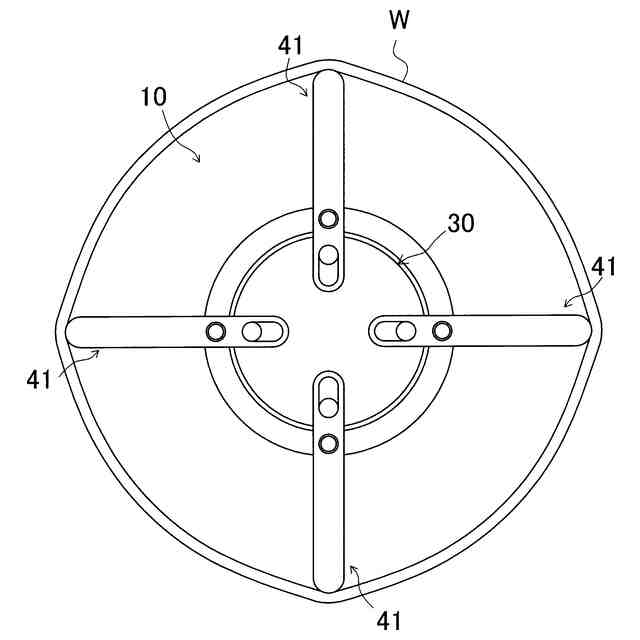
【解決手段】把持装置10は、ベース部20と、回転体30と、回転体の回転軸線Nの周囲に配された回動軸線Mを中心に回動自在にベース部に支持された複数の回動アーム41と、正方向および逆方向の回転動力を出力可能な回転動力出力部60と、回転動力を調整して回転体に出力する磁気粘性流体装置70と、を備える。複数の回動アームは、回転体がベース部に対して回転する際に回動するように回転体に連結されている。そして、磁気粘性流体装置は、回転動力出力部から入力される回転動力によって回転される入力側回転部7と、回転体と一体に回転する出力側回転部8と、入力側回転部と出力側回転部との間に介在する磁気粘性流体14と、磁気粘性流体に磁場を印加する磁場印加部9と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
ベース部と、
前記ベース部に対して回転自在に設けられた回転体と、
前記回転体の回転軸線の周囲に配された回動軸線を中心に回動自在に、前記ベース部に支持された複数の回動アームと、
正方向および逆方向の回転動力を出力可能な回転動力出力部と、
前記回転動力出力部から入力される回転動力を調整して前記回転体に出力する磁気粘性流体装置と、
を備え、
複数の前記回動アームは、前記回転体が前記ベース部に対して回転する際に回動するように前記回転体に連結されており、
前記磁気粘性流体装置は、
前記回転動力出力部から入力される回転動力によって回転される入力側回転部と、
前記回転体と一体に回転する出力側回転部と、
前記入力側回転部と前記出力側回転部との間に介在する磁気粘性流体と、
前記磁気粘性流体に磁場を印加する磁場印加部と、
を有する、
ことを特徴とする把持装置。
続きを表示(約 610 文字)
【請求項2】
請求項1に記載の把持装置であって、
前記回動アームおよび前記回転体の一方に滑子が形成され、前記回動アームおよび前記回転体の他方に前記滑子がスライド自在に連結された滑子案内部が形成されている、ことを特徴とする把持装置。
【請求項3】
請求項1に記載の把持装置であって、
複数の前記回動アームの回動軸線は、前記回転軸線方向から視て、前記回転体の回転軸線を中心とする円周上に存在する、ことを特徴とする把持装置。
【請求項4】
請求項1に記載の把持装置であって、
複数の前記回動アームは、それらが何れの回動位置にあっても、前記回転体の回転軸線と該回転軸線から最も離れた部分との距離が、互いに略同値となるように構成されている、ことを特徴とする把持装置。
【請求項5】
請求項1に記載の把持装置であって、
複数の前記回動アームは、互いに周方向に均等に離れて配置されている、ことを特徴とする把持装置。
【請求項6】
請求項1~5の何れか1項に記載の把持装置であって、
前記回転体の回転位置を検知する回転位置検知部と、
前記回転位置検知部から入力された回転位置の情報に基づいて、前記磁気粘性流体装置の磁場印加部に供給する電流値を制御する制御部と、を更に備える、
ことを特徴とする把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持対象物を把持する把持装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば、特許文献1には、円筒状の被把持物(9)を把持する把持装置が開示されている。同文献の把持装置は、複数の把持爪(2,2a~2c)と、エアシリンダ(5,5a~5c)と、を備えている。複数の把持爪(2,2a~2c)は、被把持物(9)の内側の空間に挿入され、先端部が径方向に拡がるように移動することによって被把持物(9)を内側から把持する。エアシリンダ(5,5a~5c)は、複数の把持爪(2,2a~2c)の基端側を径方向に押圧することによって、複数の把持爪(2,2a~2c)の先端側を径方向に移動させる。
【先行技術文献】
【特許文献】
【0003】
特許第2872383号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の把持装置では、圧縮性流体である気体を用いるエアシリンダを把持爪の駆動源として用いるので、把持力を精密に調整または制御することが難しいという問題があった。
【0005】
本発明は、上記の課題に鑑みて創案されたものであり、従来の把持装置よりも、精密に把持力を調整または制御することが可能な把持装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様に係る把持装置は、ベース部と、前記ベース部に対して回転自在に設けられた回転体と、前記回転体の回転軸線の周囲に配された回動軸線を中心に回動自在に、前記ベース部に支持された複数の回動アームと、正方向および逆方向の回転動力を出力可能な回転動力出力部と、前記回転動力出力部から入力される回転動力を調整して前記回転体に出力する磁気粘性流体装置と、を備える。複数の前記回動アームは、前記回転体が前記ベース部に対して回転する際に回動するように前記回転体に連結されている。前記磁気粘性流体装置は、前記回転動力出力部から入力される回転動力によって回転される入力側回転部と、前記回転体と一体に回転する出力側回転部と、前記入力側回転部と前記出力側回転部との間に介在する磁気粘性流体と、前記磁気粘性流体に磁場を印加する磁場印加部と、を有する。
【0007】
かかる構成を備える把持装置によれば、回転動力出力部から磁気粘性流体装置に入力された回転動力は、磁気粘性流体装置によって調整されて、回転体に出力される。磁気粘性流体装置は、供給される電流の電流値に応じて、その伝達トルクを精密に変化させることができるため、回転体の回転とともに回動する回動アームの回動力を精密に調整することができる。したがって、本発明の第1の態様に係る把持装置によれば、従来の把持装置よりも、精密に把持力を調整または制御することが可能となる。
【0008】
本発明の第2の態様に係る把持装置は、第1の態様に係る把持装置であって、前記回動アームおよび前記回転体の一方に滑子が形成され、前記回動アームおよび前記回転体の他方に前記滑子がスライド自在に連結された滑子案内部が形成されている。
【0009】
本発明の第3の態様に係る把持装置は、第1または第2の態様に係る把持装置であって、複数の前記回動アームの回動軸線は、前記回転軸線方向から視て、前記回転体の回転軸線を中心とする円周上に存在する。
【0010】
本発明の第4の態様に係る把持装置は、第1乃至第3の何れか1の態様に係る把持装置であって、複数の前記回動アームは、それらが何れの回動位置にあっても、前記回転体の回転軸線と該回転軸線から最も離れた部分との距離が、互いに略同値となるように構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
29日前
個人
関節モジュール
16日前
個人
寸切りボルト回し
12日前
個人
スロットルトリガー
26日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
5か月前
コクヨ株式会社
補助器具
6日前
株式会社ツノダ
挟持工具
7か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
衝撃工具
2か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
CKD株式会社
把持装置
26日前
川崎重工業株式会社
罫書用治具
3か月前
株式会社マキタ
動力工具
3か月前
オムロン株式会社
電動把持工具
5日前
学校法人立命館
グリッパ
19日前
学校法人立命館
ロボットハンド
6か月前
トヨタ自動車株式会社
ロボット
1か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
6か月前
個人
回転工具およびバリ取り部品
1か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
個人
プーリーキー抜き治具
6か月前
白山工業株式会社
ロボットアーム
23日前
トヨタ自動車株式会社
ハンド構造
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
川崎重工業株式会社
ロボット
19日前
東京都公立大学法人
ロボットハンド
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































