TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024117710
公報種別
公開特許公報(A)
公開日
2024-08-29
出願番号
2023208614
出願日
2023-12-11
発明の名称
打ち込み工具
出願人
株式会社マキタ
代理人
弁理士法人岡田国際特許事務所
主分類
B25C
1/00 20060101AFI20240822BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡便な構成で適切なタイミングで打ち込み具を送る打ち込み工具を提供すること。
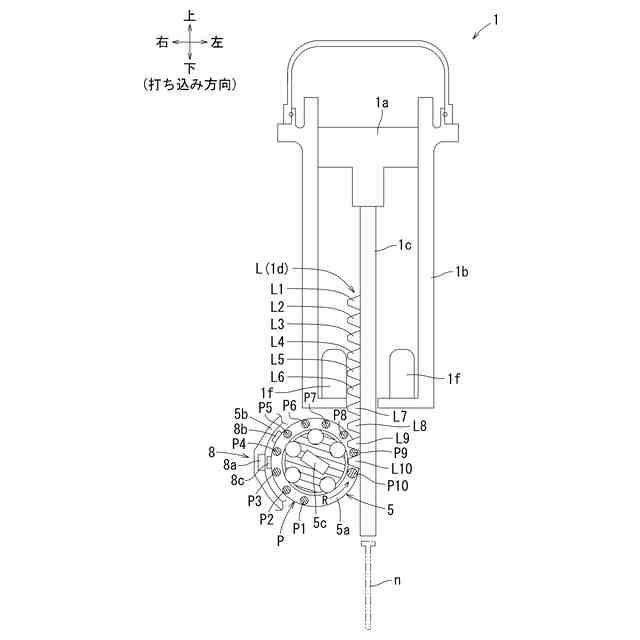
【解決手段】打ち込み工具10は、打ち込み具nを順にセット位置に送るフィーダ70を有する。ドライバ1cがセット位置の打ち込み具nを前進して打撃する。打ち込み具nは可撓性部材で連結される。リフタ5がドライバ1cに係合し、ドライバ1cを後退させる。位置検出センサがドライバ1c又はリフタ5の位置を検出する。制御部4cが位置検出センサからの信号に基づいてドライバ1cの前端がセット位置より後方に位置することを決定する。制御部4cがフィーダ70により打ち込み具nを送る。
【選択図】図1
特許請求の範囲
【請求項1】
打ち込み工具であって、
可撓性部材で連結された打ち込み具を順にセット位置に送るフィーダと、
前記セット位置の前記打ち込み具を前進して打撃するドライバと、
前記ドライバに係合して前記ドライバを後退させるリフタと、
前記ドライバまたは前記リフタの位置を検知する位置検出センサと、
前記位置検出センサからの信号に基づいて前記ドライバの前端が前記セット位置より後方に位置することを決定して前記フィーダによって前記打ち込み具を送る制御部を有する打ち込み工具。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の打ち込み工具であって、
操作部に連動するスイッチを有し、
前記制御部は、前記スイッチの信号に基づいて前記操作部が操作されたことを決定し、かつ前記位置検出センサからの信号に基づいて前記ドライバの前端が前記セット位置より後方に位置することを決定して前記フィーダにより前記打ち込み具を送る打ち込み工具。
【請求項3】
請求項1又は2に記載の打ち込み工具であって、
操作部に連動するスイッチを有し、
前記スイッチからの信号に基づいて前進した前記ドライバを前記セット位置より後方の待機位置へ移動するように前記制御部が前記リフタを動作させ、
前記位置検出センサは、前記ドライバの前記待機位置を検出する打ち込み工具。
【請求項4】
請求項1~3のいずれか1つに記載の打ち込み工具であって、
前記位置検出センサは、マグネットと、前記マグネットの磁気を検知するホールICを備える打ち込み工具。
【請求項5】
請求項1~4のいずれか1つに記載の打ち込み工具であって、
前記位置検出センサは、前記リフタの位置を検出する打ち込み工具。
【請求項6】
請求項5に記載の打ち込み工具であって、
前記リフタは、モータによって回転し、
前記位置検出センサは、前記リフタに設けられたマグネットと、前記リフタを収容するハウジングに設けられて前記マグネットの磁気を検知するホールICを有する打ち込み工具。
【請求項7】
請求項6に記載の打ち込み工具であって、
前記マグネットは、前記リフタに設けられて前記リフタの回転と同期して回転する回転部材に設けられる打ち込み工具。
【請求項8】
請求項6又は7に記載の打ち込み工具であって、
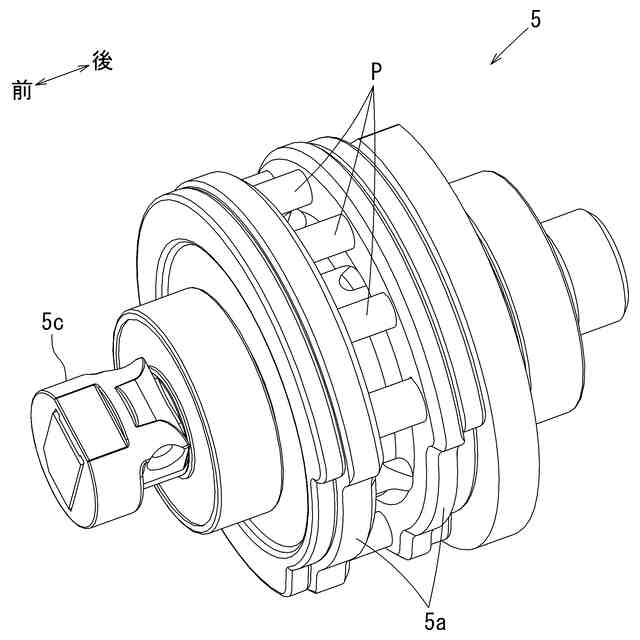
前記リフタは、ホイールと、前記ホイールの回転軸の周りに間隔をおいて配置される複数のピンを有し、
前記マグネットが前記ホイールに設けられる打ち込み工具。
【請求項9】
請求項1~8のいずれか1つに記載の打ち込み工具であって、
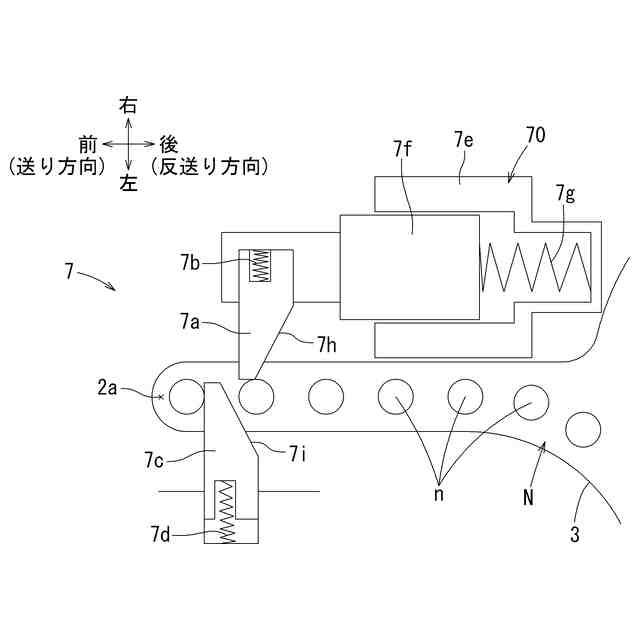
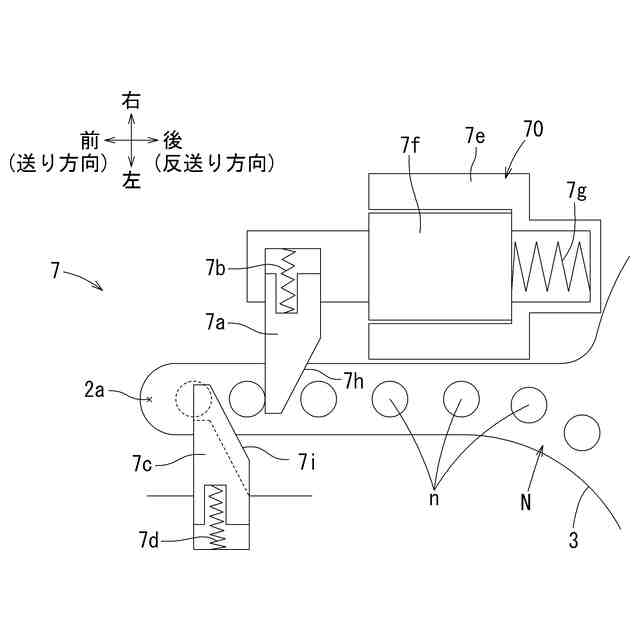
前記フィーダは、爪と、前記爪を移動させるソレノイドを備える打ち込み工具。
【請求項10】
請求項9に記載の打ち込み工具であって、
前記フィーダは、前記爪を前記セット位置に向けて付勢するばねを有し、
前記ソレノイドが前記ばねに抗して前記爪を移動させる打ち込み工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、釘やステープル等の打ち込み具を木材等に打ち込むための打ち込み工具に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1と2の打ち込み工具は、コイルに連結されている複数の釘を順に供給するフィーダを有する。フィーダは、先頭の釘に係合する爪と、爪を往復動させるソレノイドを有する。フィーダによって供給された釘は、射出装置のセット位置にセットされる。射出装置のドライバがセット位置の釘を打ち出す。ドライバがリフタによって待機位置に戻される。ドライバが待機位置に戻るタイミングでソレノイドが爪を移動させる。しかし打ち込み工具のバッテリ残量が減ると、リフタに供給される電圧が降下する。これによりドライバの戻りが遅くなる場合がある。この場合、ドライバが待機位置へ戻る前にフィーダが釘を送る。これにより射出装置内で釘が詰まる。
【0003】
特許文献3の打ち込み工具も射出装置に装着されるフィーダを有する。フィーダはリフタと複数の部材を経て連結される。したがってリフタがドライバを待機位置へ戻す際、リフタに連動してフィーダが釘を送る。しかしフィーダとリフタが機械的に係合すると構成が複雑になる場合がある。この場合ロバスト性が弱く、釘送り動作の精度にばらつきが生じる懸念がある。あるいはメカニカルロスが大きくなりやすい、あるいは工具が高価になりやすい。
【先行技術文献】
【特許文献】
【0004】
米国特許第11224960号明細書
米国特許出願公開第2022/0161404号明細書
米国特許第11446801号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
従って簡便な構成で適切なタイミングで打ち込み具を送る打ち込み工具が従来、必要とされている。
【課題を解決するための手段】
【0006】
本開示の1つの局面によると、打ち込み工具は、打ち込み具を順にセット位置に送るフィーダを有する。ドライバがセット位置の打ち込み具を前進して打撃する。打ち込み具は可撓性部材で連結される。リフタがドライバに係合し、ドライバを後退させる。位置検出センサがドライバ又はリフタの位置を検出する。制御部が位置検出センサからの信号に基づいてドライバの前端がセット位置より後方に位置することを決定する。制御部がフィーダにより打ち込み具を送る。
【0007】
従ってフィーダは制御部により動作される。これによりフィーダは、リフタと機械的に係合される必要がない。このため、打ち込み工具の構成を簡便にすることができる。フィーダは、ドライバの前端がセット位置より後方に位置してから制御部により動かされる。これにより、ドライバと干渉させることなく打ち込み具を送ることができる。このように簡便な構成で適切なタイミングで打ち込み具を送ることができる。
【図面の簡単な説明】
【0008】
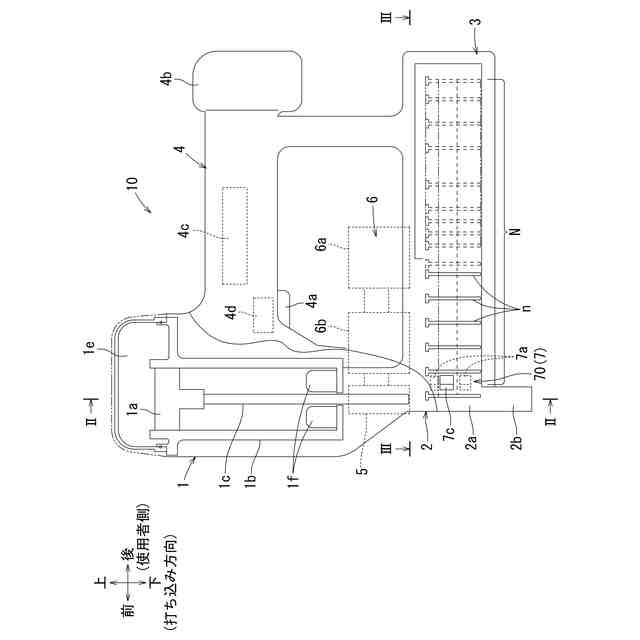
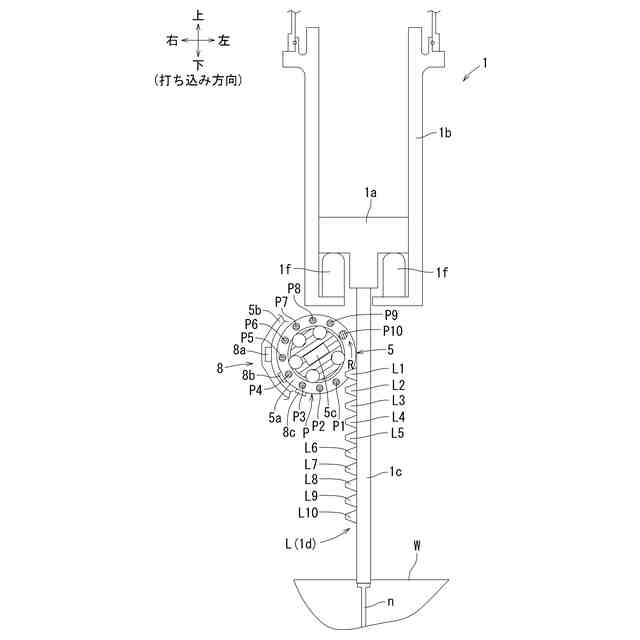
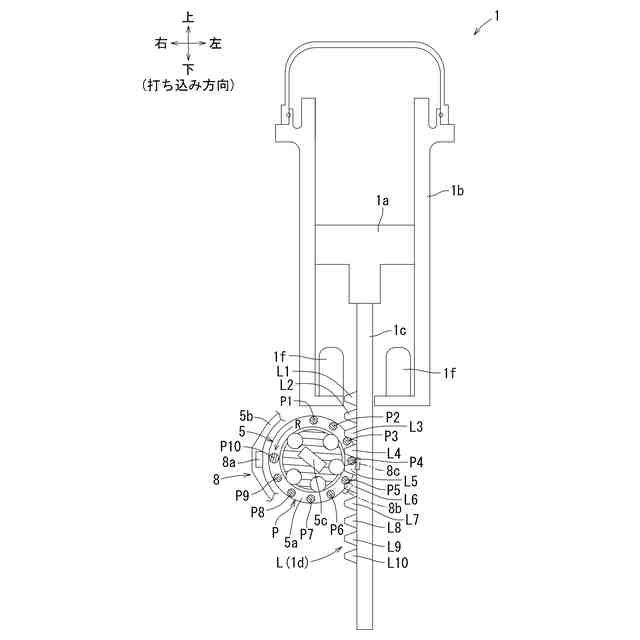
一部断面を含む打ち込み工具の概略側面図である。
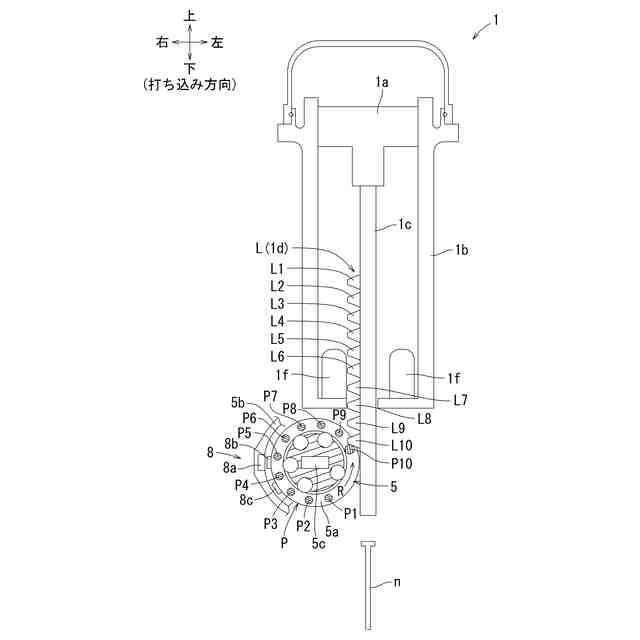
図1のII-II線断面矢視図である。
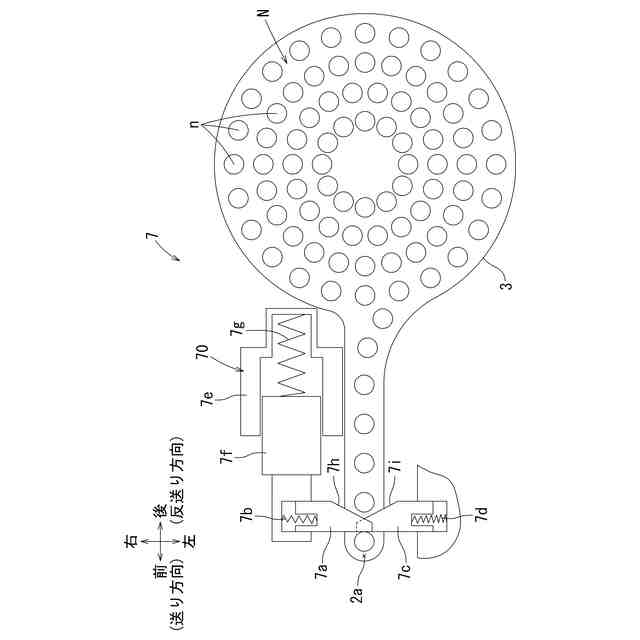
図1のIII-III線断面矢視図である。
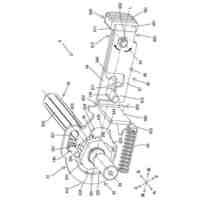
リフタの斜視図である。
ドライバが打ち込み具を打撃した状態における図2に対応する図である。
リフタがドライバを後退させる状態における図2に対応する図である。
ドライバの前端がセット位置より後方に位置する状態における図2に対応する図である。
送り爪が反送り方向に戻される途中の状態における図3に対応する図である。
送り爪が反送り方向に戻された状態における図3に対応する図である。
本開示の第2実施例に係るリフタの斜視図である。
第2実施例に係るドライバが待機位置にセットされた状態における前断面図である。
図11の状態における左断面図である。
ドライバの前端がセット位置より後方に位置する状態における図11に対応する図である。
ドライバが打ち込み具を打撃した状態における図11に対応する図である。
図11のXV矢視部拡大図である。
【発明を実施するための形態】
【0009】
本開示の他の局面によると、打ち込み工具は操作部に連動するスイッチを有する。制御部は、スイッチの信号に基づいて操作部が操作されたことを決定する。制御部は、位置検出センサからの信号に基づいてドライバの前端がセット位置より後方に位置することを決定する。制御部がフィーダにより打ち込み具を送る。従って制御部は、ドライバの前端がセット位置より後方に位置し、かつ操作部が操作された際に打ち込み具を送る。すなわち操作部が操作される前には、打ち込み具がセット位置に送られない。その結果、ドライバが誤作動した際に誤って打ち込み具を打撃することを抑制できる。なお、ドライバの位置の決定と操作部の操作の決定はどちらが先に行われても良い。
【0010】
本開示の他の局面によると、打ち込み工具は操作部に連動するスイッチを有する。制御部は、スイッチからの信号に基づいてリフタを動作させる。リフタは、前進したドライバをセット位置より後方の待機位置へ移動する。位置検出センサは、ドライバの待機位置を検出する。そのためリフタがドライバを待機位置に移動させる動作を位置検出センサが検出する。そのため精度の高いタイミングで打ち込み具をセット位置に送ることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動工具
13日前
株式会社マキタ
長尺定規用位置決め装置
12日前
個人
木製ハンマー
29日前
個人
関節モジュール
16日前
個人
寸切りボルト回し
12日前
個人
スロットルトリガー
26日前
個人
ねじ締め装置
9か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
7か月前
コクヨ株式会社
補助器具
6日前
株式会社ツノダ
挟持工具
5か月前
日東工器株式会社
衝撃工具
2か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
株式会社右川ゴム製造所
把持装置
5か月前
川崎重工業株式会社
ハンド
7か月前
個人
ロボットシステム
9か月前
個人
メンテナンス用スタンド
2か月前
東京計器株式会社
接触検知装置
1か月前
川崎重工業株式会社
罫書用治具
3か月前
CKD株式会社
把持装置
26日前
株式会社不二越
ロボット
9か月前
トヨタ自動車株式会社
関節機構
9か月前
学校法人立命館
グリッパ
19日前
学校法人立命館
グリッパ
6か月前
トヨタ自動車株式会社
関節機構
9か月前
学校法人立命館
ロボットハンド
6か月前
株式会社マキタ
動力工具
3か月前
オムロン株式会社
電動把持工具
5日前
トヨタ自動車株式会社
ロボット
1か月前
株式会社ダイヘン
搬送装置
3か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
株式会社ハーモ
開閉チャック装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ