TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024112523
公報種別
公開特許公報(A)
公開日
2024-08-21
出願番号
2023017600
出願日
2023-02-08
発明の名称
歩行制御方法
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
5/00 20060101AFI20240814BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】外乱が生じた場合であってもロバストに継続歩行することができる歩行制御方法を提供することを目的とする。
【解決手段】実施形態の歩行制御方法は、脚部を有する移動装置を、複数の質点に分解し、分解された前記複数の質点を、第1質点と、それ以外の第2質点とに分解し、前記第1質点と歩行平面上の接触点とを結ぶ直線の長さが一定であるとし、前記第2質点は、前記第1質点のアフィン変換された位置に拘束されるとし、前記第1質点が動かされると、前記拘束に従い、前記第2質点の拘束軌道を生成し、単質点モデルに、遊脚の運動に関する追加質点を加えた多質点モデルを用いて、前記追加質点の重心が前記追加質点の重心位置のアフィン変換となるような前記追加質点の重心の拘束軌道を与え、予想される前記追加質点の重心のピーク位置を前記接触点周りに所定角度だけ回転させた位置にずらす、ことを含む。
【選択図】図14
特許請求の範囲
【請求項1】
歩行制御装置が、
脚部を有する移動装置を、複数の質点に分解し、
分解された前記複数の質点を、注目すべき1つの質点である第1質点と、前記第1質点を除いた残りの質点である第2質点とに分解し、
前記第1質点と歩行平面上の接触点とを結ぶ直線の長さが一定であるとし、
前記第2質点は、前記第1質点のアフィン変換された位置に拘束されるとし、
前記第1質点が動かされると、前記拘束に従い、前記第2質点の拘束軌道を生成し、
単質点モデルに、遊脚の運動に関する追加質点を加えた多質点モデルを用いて、前記追加質点の重心が前記追加質点の重心位置のアフィン変換となるような前記追加質点の重心の拘束軌道を与え、
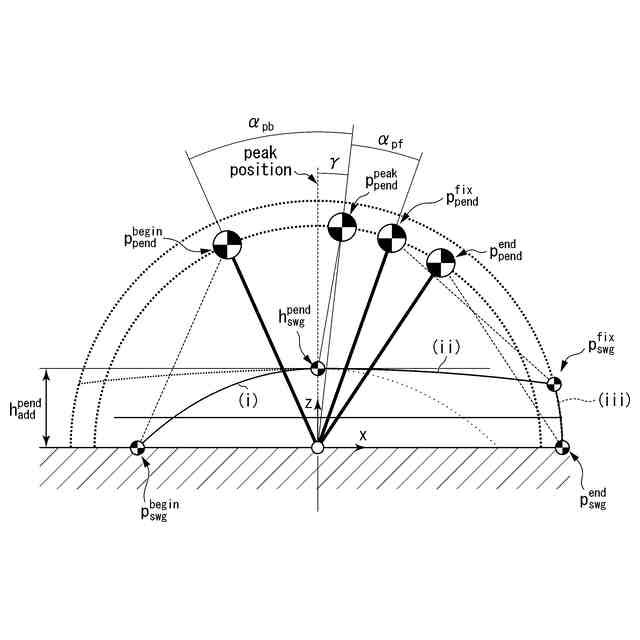
予想される前記追加質点の重心のピーク位置を前記歩行平面上の接触点を原点として所定角度だけ回転させた位置にずらす、
歩行制御方法。
続きを表示(約 810 文字)
【請求項2】
前記所定角度は、前記遊脚を振り始めたときの支持脚の位置に応じた角度である、
請求項1に記載の歩行制御方法。
【請求項3】
前記所定角度をγとしたとき、γは次式で表され、
TIFF
2024112523000017.tif
13
170
ここで、α
gb
は、前記遊脚が前記歩行平面から離れたときの前記支持脚と前記歩行平面とのなす角であり、
α
fe
は、前記遊脚の振り終わりの前記追加質点の重心位置と、前記遊脚が前記歩行平面に接する際の前記追加質点の重心位置とのなす角であり、
α
eg
は、前記遊脚が前記歩行平面に接する際の前記追加質点の重心位置と、前記歩行平面とのなす角であり、
η
swing
は、α
bp
/α
pf
であり、
α
bp
は、(P
pend
)
begin
と、(P
pend
)
peak
とのなす角であり、
(P
pend
)
begin
は、前記歩行平面上の接触点を原点としたときの、前記遊脚の運動が開始された時点における前記第1質点の位置であり、
(P
pend
)
peak
は、前記歩行平面上の接触点を原点としたときの、前記第1質点が前記原点の直上に到達したときの前記第1質点の位置であり、
α
pf
は、(P
pend
)
peak
と、前記遊脚の運動が終了した時点における前記追加質点の重心位置とのなす角である、
請求項2に記載の歩行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、二足歩行ロボットの研究が進められている。ロボットが人間のように歩けるようになるには、特に耐故障性や効率性の面で機能が十分でない。二足歩行ロボットでは、柔らかさを加えることでロボットの耐故障性が向上し、関節のトルク制御が可能なロボットの開発も行われている。
【0003】
例えば、弾性を有する脚式ロボットの歩行の制御方法では、例えば歩行の巨視的な運動に着目した3つの要素(胴体姿勢制御,蹴りだし制御,接地位置制御)に分解して歩行を実現する制御手法がある。例えば非特許文献1では、歩行の要素分解を、人間の歩行動作に着目した巨視的な挙動に分解している。要素は、蹴り、遊脚及び歩幅、状態姿勢維持の3つの能動的な要素である。この手法は、Raibertらが提案した走行制御の手法である(非特許文献1参照)。
【0004】
また、Hodginsが、この手法を歩行に拡張した(非特許文献2参照)。なお、Hodgingsが行った3分割制御は、歩幅制御、高さ制御および姿勢制御の3つの独立した制御則からなる。歩幅制御では、水平速度を目標値に追従させるように歩幅を制御する。ただし、歩幅制御では、定常歩行では不要である。高さ制御では、遊脚着床時に次の片脚支持期の胴体の目標高さを満たすように後ろ脚の蹴りによってエネルギーを印加する。姿勢制御では、胴体の姿勢を鉛直に保つためにフィードバック制御する。
【先行技術文献】
【非特許文献】
【0005】
Marc H. Raibert, ”Legged Robots That Balance (Artificial Intelligence)”, MIT Press, 1986
J. K. Hodgins, “Biped gait transitions,” in Proc. IEEE Int. Conf. Robot. Autom, 1991, pp. 2092-2097.
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、これらの従来技術では、外乱が生じる状況においてロバストに歩行を継続することができない場合があった。
【0007】
本発明は、上記の問題点に鑑みてなされたものであって、外乱が生じた場合であってもロバストに継続歩行することができる歩行制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)本発明の第1の例は、脚部を有する移動装置を、複数の質点に分解し、分解された前記複数の質点を、注目すべき1つの質点である第1質点と、前記第1質点を除いた残りの質点である第2質点とに分解し、前記第1質点と歩行平面上の接触点とを結ぶ直線の長さが一定であるとし、前記第2質点は、前記第1質点のアフィン変換された位置に拘束されるとし、前記第1質点が動かされると、前記拘束に従い、前記第2質点の拘束軌道を生成し、単質点モデルに、遊脚の運動に関する追加質点を加えた多質点モデルを用いて、前記追加質点の重心が前記追加質点の重心位置のアフィン変換となるような前記追加質点の重心の拘束軌道を与え、予想される前記追加質点の重心のピーク位置を前記歩行平面上の接触点を原点として所定角度だけ回転させた位置にずらす、歩行制御方法である。
【0009】
(2)本発明の第2の例は、第1の例の歩行制御方法において、前記所定角度は、前記遊脚を振り始めたときの支持脚の位置に応じた角度である。
【0010】
(3)本発明の第3の例は、第2の例の歩行制御方法において、前記所定角度をγとしたとき、γは後述の数式(15)で表される。ここで、α
gb
は、前記遊脚が前記歩行平面から離れたときの前記支持脚と前記歩行平面とのなす角であり、α
fe
は、前記遊脚の振り終わりの前記第4質点の重心位置と、前記遊脚が前記歩行平面に接する際の前記第4質点の重心位置とのなす角であり、α
bp
は、(P
pend
)
begin
と、(P
pend
)
peak
とのなす角であり、(P
pend
)
begin
は、前記歩行平面上の接触点を原点としたときの、前記遊脚運動が開始された時点における前記第1質点の位置であり、(P
pend
)
peak
は、前記歩行平面上の接触点を原点としたときの、前記第1質点が前記原点の直上に到達したときの前記第1質点の位置であり、α
pf
は、(P
pend
)
peak
と、前記遊脚の運動が終了した時点における前記追加質点の重心位置とのなす角であるである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
29日前
個人
関節モジュール
16日前
個人
寸切りボルト回し
12日前
個人
スロットルトリガー
26日前
個人
ねじ締め装置
9か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
7か月前
コクヨ株式会社
補助器具
6日前
株式会社ツノダ
挟持工具
5か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
衝撃工具
2か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
個人
ロボットシステム
9か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
6か月前
株式会社不二越
ロボット
9か月前
CKD株式会社
把持装置
26日前
学校法人立命館
グリッパ
19日前
トヨタ自動車株式会社
ロボット
1か月前
学校法人立命館
ロボットハンド
6か月前
トヨタ自動車株式会社
関節機構
9か月前
オムロン株式会社
電動把持工具
5日前
株式会社マキタ
動力工具
3か月前
川崎重工業株式会社
罫書用治具
3か月前
トヨタ自動車株式会社
関節機構
9か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
株式会社ダイヘン
搬送装置
3か月前
白山工業株式会社
ロボットアーム
23日前
個人
プーリーキー抜き治具
6か月前
株式会社ハーモ
開閉チャック装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































