TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024109318
公報種別
公開特許公報(A)
公開日
2024-08-14
出願番号
2023014046
出願日
2023-02-01
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20240806BHJP(信号)
要約
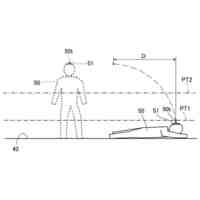
【課題】車両10の運転者に対して適切に安全確認を促す。
【解決手段】運転支援装置(11)は、自車両(10)のユーザに対して報知を行う。当該運転支援装置は、第1時刻から微小時間後の第2時刻の複数の未来位置と、第2時刻に複数の未来位置各々に存在する確率との関係を示す位置ポテンシャル情報に基づいて予測された自車両及び周辺対象物各々の軌道に基づく、自車両と周辺対象物との衝突可能性に応じて報知を行う報知手段(15)を備える。
【選択図】図1
特許請求の範囲
【請求項1】
自車両のユーザに対して報知を行う運転支援装置であって、
前記自車両が第1時刻から微小時間後の第2時刻に存在する可能性がある複数の第1未来位置と、前記第2時刻に前記自車両が前記複数の第1未来位置各々に存在する確率との関係を示す第1位置ポテンシャル情報に基づいて、前記第2時刻に、前記複数の第1未来位置のうち、前記確率が比較的高い一の第1未来位置に前記自車両が存在すると仮定して、前記自車両が前記第2時刻から微小時間後の第3時刻に存在する可能性がある複数の第2未来位置と、前記第3時刻に前記自車両が前記複数の第2未来位置各々に存在する確率との関係を示す第2位置ポテンシャル情報が算出されることによって予測された前記自車両の軌道と、
前記自車両の周辺に存在する周辺対象物が前記第2時刻に存在する可能性がある複数の第3未来位置と、前記第2時刻に前記周辺対象物が前記複数の第3未来位置各々に存在する確率との関係を示す第3位置ポテンシャル情報に基づいて、前記第2時刻に、前記複数の第3未来位置のうち、前記確率が比較的高い一の第3未来位置に前記周辺対象物が存在すると仮定して、前記周辺対象物が前記第3時刻に存在する可能性がある複数の第4未来位置と、前記第3時刻に前記周辺対象物が前記複数の第4未来位置各々に存在する確率との関係を示す第4位置ポテンシャル情報が算出されることによって予測された前記周辺対象物の軌道と、
に基づく前記自車両と前記周辺対象物との接触可能性に応じて、前記報知を行う報知手段を備える
ことを特徴とする運転支援装置。
続きを表示(約 190 文字)
【請求項2】
前記周辺対象物としての第1周辺対象物及び第2周辺対象物が存在する場合、前記報知手段は、前記自車両と前記周辺対象物との接触可能性に加えて、予測された前記第1周辺対象物の軌道と予測された前記第2周辺対象物の軌道とに基づく前記第1周辺対象物と前記第2周辺対象物との接触可能性に応じて、前記報知を行う
ことを特徴とする請求項1に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援装置の技術分野に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
この種の装置として、例えば、車両の周辺状況を監視する周辺監視センサにより得られた周辺状況のデータに基づいて求められた方向別のリスクレベルと、車内カメラにより撮影した映像に基づく運転者の方向別の注視割合とに基づいて、リスクの見落としを検知する装置が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-114104号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術には改善の余地がある。本発明は、該事情に鑑みてなされたものであり、車両の運転者に対して適切に安全確認を促すことができる運転支援装置を提供することを課題とする。
【課題を解決するための手段】
【0005】
本発明の一態様に係る運転支援装置は、自車両のユーザに対して報知を行う運転支援装置であって、前記自車両が第1時刻から微小時間後の第2時刻に存在する可能性がある複数の第1未来位置と、前記第2時刻に前記自車両が前記複数の第1未来位置各々に存在する確率との関係を示す第1位置ポテンシャル情報に基づいて、前記第2時刻に、前記複数の第1未来位置のうち、前記確率が比較的高い一の第1未来位置に前記自車両が存在すると仮定して、前記自車両が前記第2時刻から微小時間後の第3時刻に存在する可能性がある複数の第2未来位置と、前記第3時刻に前記自車両が前記複数の第2未来位置各々に存在する確率との関係を示す第2位置ポテンシャル情報が算出されることによって予測された前記自車両の軌道と、前記自車両の周辺に存在する周辺対象物が前記第2時刻に存在する可能性がある複数の第3未来位置と、前記第2時刻に前記周辺対象物が前記複数の第3未来位置各々に存在する確率との関係を示す第3位置ポテンシャル情報に基づいて、前記第2時刻に、前記複数の第3未来位置のうち、前記確率が比較的高い一の第3未来位置に前記周辺対象物が存在すると仮定して、前記周辺対象物が前記第3時刻に存在する可能性がある複数の第4未来位置と、前記第3時刻に前記周辺対象物が前記複数の第4未来位置各々に存在する確率との関係を示す第4位置ポテンシャル情報が算出されることによって予測された前記周辺対象物の軌道と、に基づく前記自車両と前記周辺対象物との接触可能性に応じて、前記報知を行う報知手段を備えるというものである。
【図面の簡単な説明】
【0006】
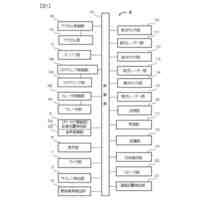
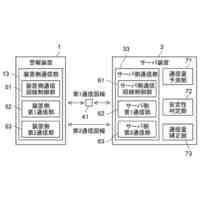
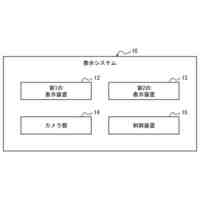
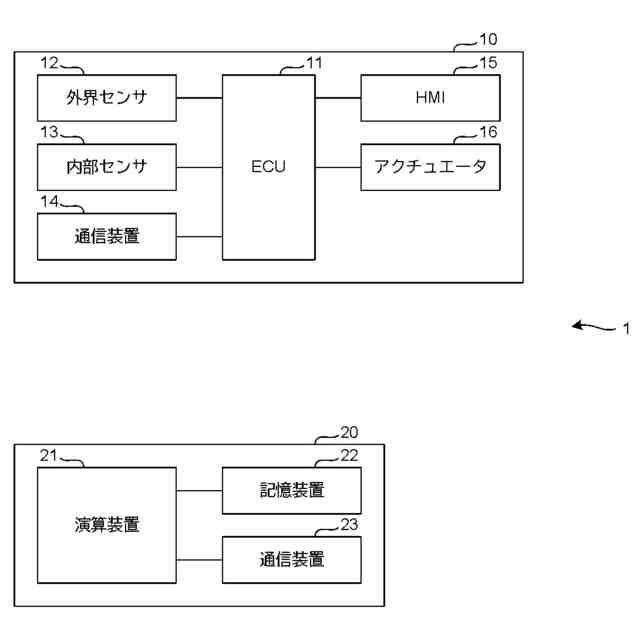
実施形態に係る運転支援システムの構成を示すブロック図である。
演算モデルの一例を示す概念図である。
位置ポテンシャルの一例を示す概念図である。
予測された軌道の一例を示す概念図である。
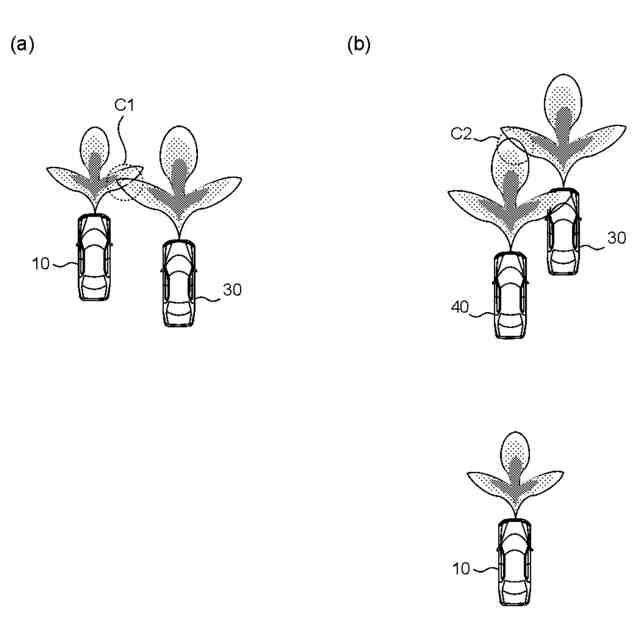
接触可能性の概念を示す図である。
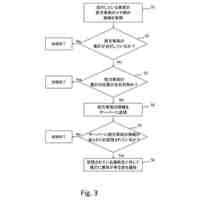
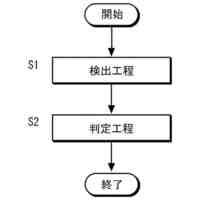
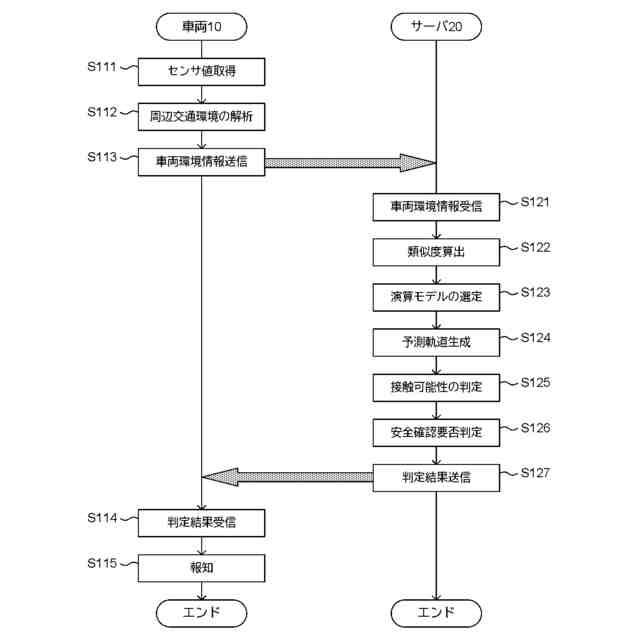
実施形態に係る運転支援システムの動作を示すフローチャートである。
【発明を実施するための形態】
【0007】
運転支援装置に係る実施形態について図1乃至図6を参照して説明する。以下の実施形態では、運転支援装置の一例として運転支援システム1を挙げる。
【0008】
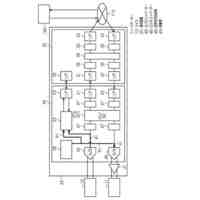
図1において、運転支援システム1は、車両10及びサーバ20を備える。車両10は、ECU(Electronic Control Unit)11、外界センサ12、内部センサ13、通信装置14、HMI(Human Machine Interface)15及びアクチュエータ16を備える。サーバ20は、演算装置21、記憶装置22及び通信装置23を備える。車両10及びサーバ20は、通信装置14及び23を介して通信可能に構成されている。
【0009】
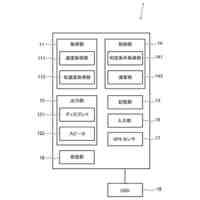
外界センサ12は、車両10の周辺の状況を検出するセンサである。外界センサ12は、車両10の前方を撮像可能に配置されたフロントカメラ、車両10の側方及び後方を夫々撮像可能に配置された複数のカメラを有する全方位カメラ、車両10の前方の物体を検出可能なミリ波レーダ、及び、車両10の近傍且つ車両10の周囲に存在する物体を検出可能なクリアランスソナーを含んでいてよい。外界センサ12は、LiDER(Light Detection and Ranging)を含んでいてもよい。
【0010】
内部センサ13は、車両10の運動状態を検出するセンサである。内部センサ13は、車輪速センサ、加減速度センサ、ヨーレートセンサ、舵角センサ、アクセルセンサ及びブレーキセンサを含んでいてよい。尚、車両10の運動状態は、車両10の挙動と称されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
8日前
個人
火器使用警報装置
2か月前
ニッタン株式会社
煙感知器
1か月前
大阪瓦斯株式会社
警報装置
3か月前
株式会社サンライン
発炎筒携行容器
6日前
ニッタン株式会社
発信機
2か月前
アズビル株式会社
測定システム
2か月前
能美防災株式会社
表示灯カバー
1か月前
株式会社大林組
誘導装置
3か月前
株式会社SUBARU
車載装置
3か月前
ニッタン株式会社
煙感知器
3か月前
株式会社小糸製作所
転倒検知装置
3か月前
大阪瓦斯株式会社
音声出力システム
3か月前
能美防災株式会社
非常放送システム
1か月前
大阪瓦斯株式会社
音声出力システム
3か月前
日本無線株式会社
人物探索システム
1か月前
大阪瓦斯株式会社
音声出力システム
3か月前
大阪瓦斯株式会社
音声出力システム
3か月前
大阪瓦斯株式会社
音声出力システム
3か月前
株式会社ブリッツ
車両情報処理装置
3か月前
綜合警備保障株式会社
警備システム
3か月前
京セラ株式会社
案内システム及び案内方法
1か月前
株式会社SUBARU
運転支援装置
3か月前
日本信号株式会社
情報提供システム
2か月前
株式会社CCT
監視装置及び監視方法
3か月前
ニッタン株式会社
火災感知端末
3か月前
個人
安全に飛び乗りが可能な低速自動運転車
1か月前
ニッタン株式会社
火災感知端末
3か月前
トヨタ自動車株式会社
通信装置
3か月前
トヨタ自動車株式会社
運転支援システム
1か月前
株式会社ユピテル
システムおよびプログラム等
3か月前
シャープ株式会社
表示装置
20日前
トヨタ車体株式会社
運転支援装置
3か月前
株式会社F2Fグループ
疲労度判定方法
1か月前
京セラ株式会社
表示システム
1か月前
日本信号株式会社
遠隔監視システム
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ