TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024104958
公報種別
公開特許公報(A)
公開日
2024-08-06
出願番号
2023009423
出願日
2023-01-25
発明の名称
動作制御システム、追従ロボット
出願人
ノリテックデザイン株式会社
,
国立大学法人信州大学
代理人
弁理士法人綿貫国際特許・商標事務所
主分類
G05D
1/43 20240101AFI20240730BHJP(制御;調整)
要約
【課題】同行者と動作制御システムの間に入り込んだ非同行者を同行者と誤認させることのない信頼性の高い動作制御システムを提供すること。
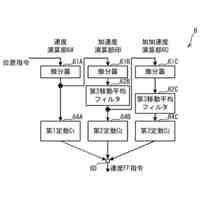
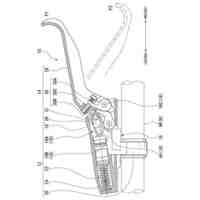
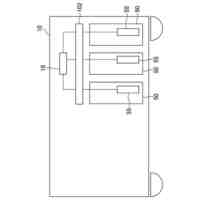
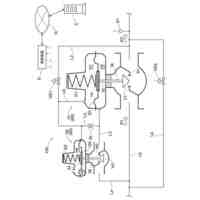
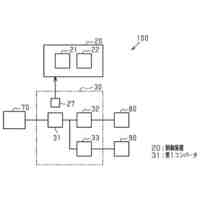
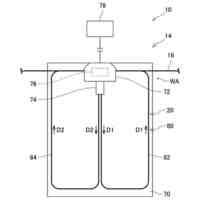
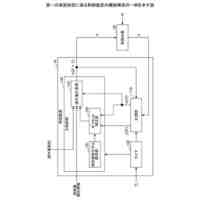
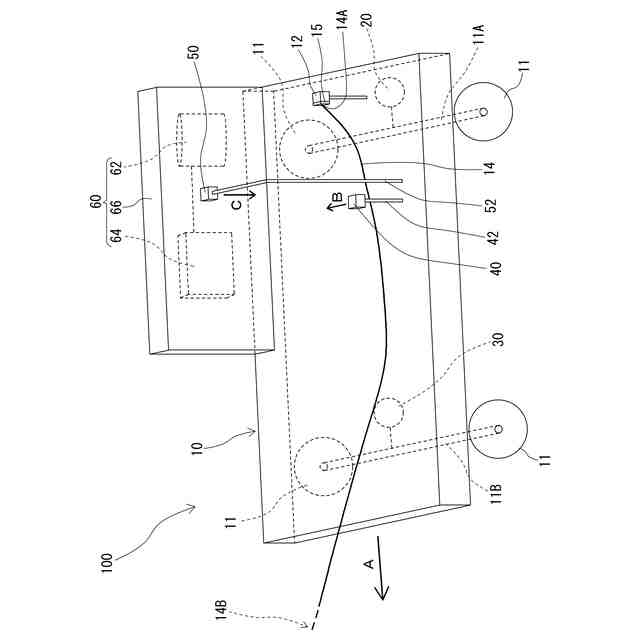
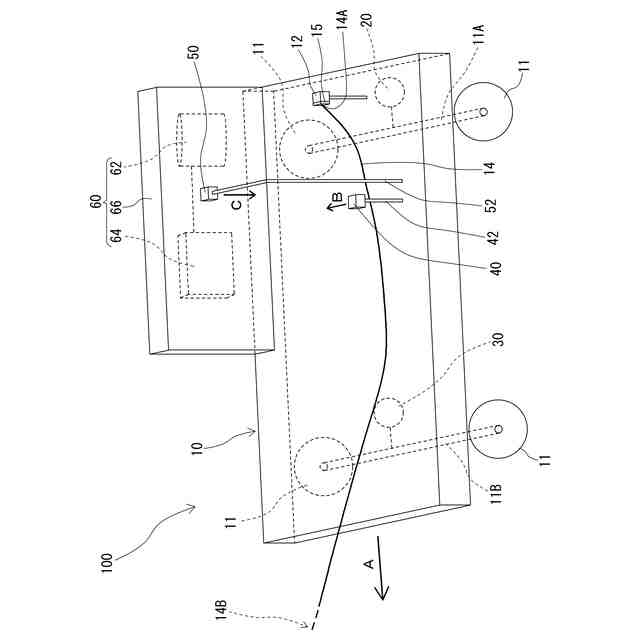
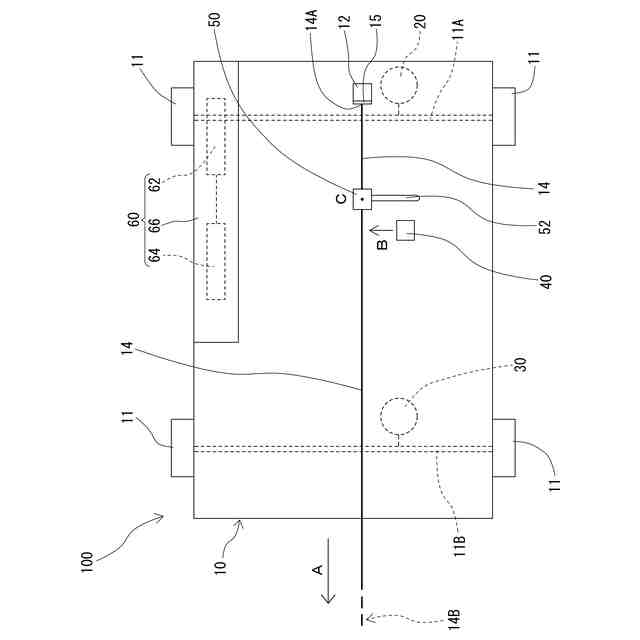
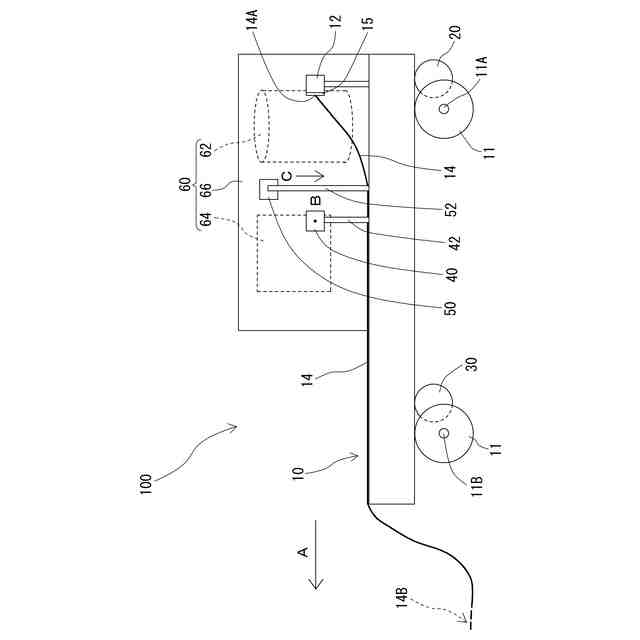
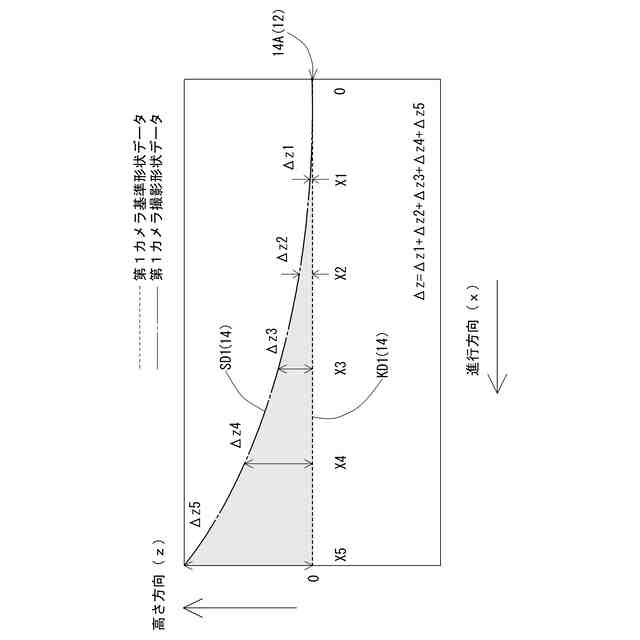
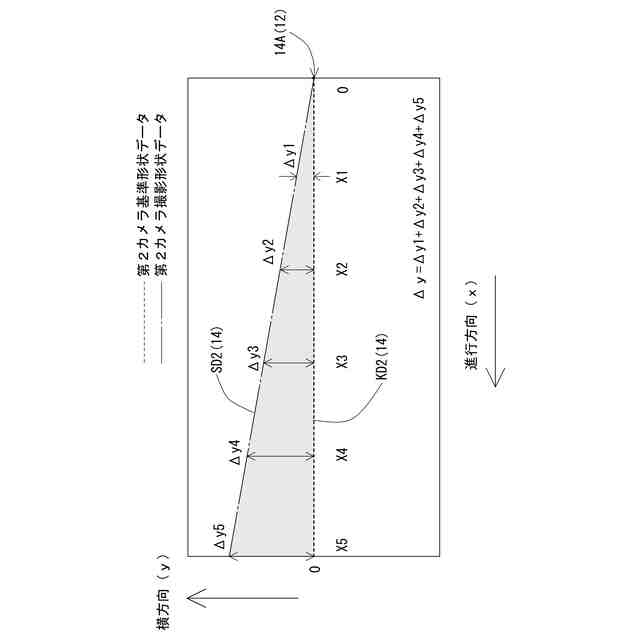
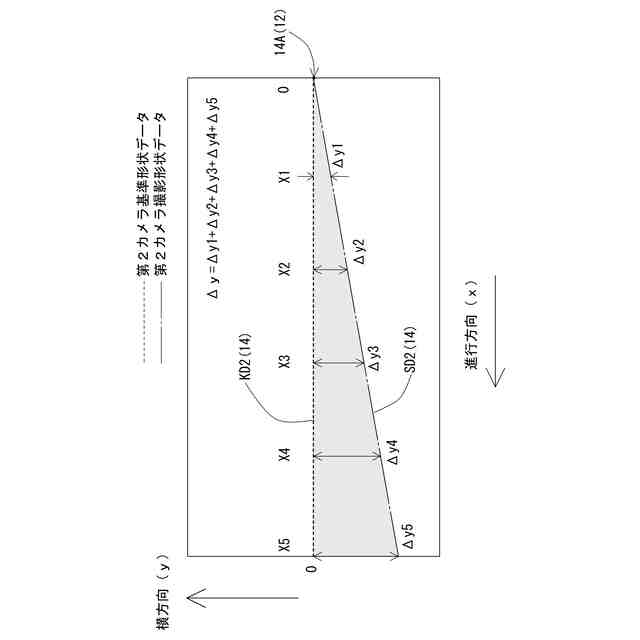
【解決手段】紐状体14と、紐状体14の第1端部14Aが係合される係合部12と係合部12に係合された紐状体14の基準位置における形状に対し、紐状体14の第2端部14Bの側が移動した際における紐状体14の第1方向から紐状体14を臨んだ際の紐状体14の形状変化および紐状体14の第2方向から紐状体14を臨んだ際の紐状体14の形状変化をそれぞれ計測する第1カメラ40および第2カメラ50と、第1方向から紐状体14を臨んだ際の紐状体14の形状変化に基づいて第1モータ20の動作制御信号を生成すると共に第2方向から紐状体14を臨んだ際の紐状体14の形状変化に基づいて第2モータ30の動作制御信号を生成する演算手段64と、を具備する動作制御部(動作制御システム)60である。
【選択図】図1
特許請求の範囲
【請求項1】
紐状体と、
前記紐状体の第1端部が係合される係合部と、
前記係合部に係合された前記紐状体の基準位置における形状に対し、前記紐状体の第2端部側が移動した際における前記紐状体の第1方向から前記紐状体を臨んだ際の前記紐状体の形状変化および前記紐状体の第2方向から前記紐状体を臨んだ際の前記紐状体の形状変化をそれぞれ計測する計測手段と、
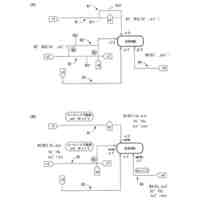
前記第1方向から前記紐状体を臨んだ際の前記紐状体の形状変化に基づいて第1動作制御信号を生成すると共に前記第2方向から前記紐状体を臨んだ際の前記紐状体の形状変化に基づいて第2動作制御信号を生成する動作制御信号生成手段と、を具備することを特徴とする動作制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記第1方向と前記第2方向は、前記紐状体を長さ方向に計測可能であると共に互いに直交していることを特徴とする請求項1記載の動作制御システム。
【請求項3】
前記計測手段は、前記第1方向から前記紐状体の形状変化を計測する第1計測手段と、前記第2方向から前記紐状体の形状変化を計測する第2計測手段と、を有していることを特徴とする請求項1または2記載の動作制御システム。
【請求項4】
前記計測手段と前記紐状体の一部は外乱防止体に収容されていることを特徴とする請求項1または2記載の動作制御システム。
【請求項5】
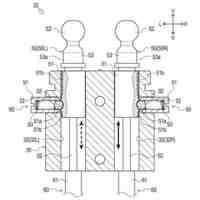
前記外乱防止体は、前記紐状体の前記第2端部の側に開口する有底筒状体に形成されており、
前記紐状体の前記第1端部は、前記有底筒状体の内部空間に配設された前記係合部または前記有底筒状体の内表面に係合されていて、
前記紐状体に所定張力が作用した際に前記係合部または前記内表面と前記紐状体との係合が解除されると共に、前記動作制御信号生成手段は、前記第1動作制御信号および前記第2動作制御信号のうちの少なくとも一方で停止信号を生成することを特徴とする請求項4記載の動作制御システム。
【請求項6】
前記紐状体に所定張力が作用した際に前記係合部と前記紐状体との係合が解除されると共に、前記動作制御信号生成手段は、前記第1動作制御信号および前記第2動作制御信号のうちの少なくとも一方で停止信号を生成することを特徴とする請求項1または2記載の動作制御システム。
【請求項7】
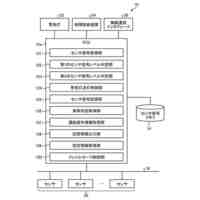
移動手段と、操舵手段と、前記移動手段および前記操舵手段の動作をそれぞれ制御する動作制御部と、を具備する追従ロボットであって、
前記動作制御部は、
紐状体と、
前記紐状体の第1端部が係合される係合部と、
前記係合部に係合された前記紐状体の基準位置における形状に対し、前記紐状体の第2端部側が移動した際における前記紐状体の第1方向から前記紐状体を臨んだ際の前記紐状体の形状変化および前記紐状体の第2方向から前記紐状体を臨んだ際の前記紐状体の形状変化をそれぞれ計測する計測手段と、
前記第1方向から前記紐状体を臨んだ際の前記紐状体の形状変化に基づいて前記移動手段の動作を制御する移動手段動作制御信号を生成すると共に前記第2方向から前記紐状体を臨んだ際の前記紐状体の形状変化に基づいて前記操舵手段の動作を制御する操舵手段動作制御信号を生成する動作制御信号生成手段と、
前記移動手段動作制御信号に基づいて前記移動手段の動作を制御すると共に前記操舵手段動作制御信号に基づいて前記操舵手段の動作を制御する制御手段と、を有していることを特徴とする追従ロボット。
【請求項8】
前記第1方向と前記第2方向は、前記紐状体を長さ方向に計測可能であると共に互いに直交していることを特徴とする請求項7記載の追従ロボット。
【請求項9】
前記計測手段は、
前記第1方向から前記紐状体の形状変化を計測する第1計測手段と、前記第2方向から前記紐状体の形状変化を計測する第2計測手段と、を有していることを特徴とする請求項7または8記載の追従ロボット。
【請求項10】
前記計測手段と前記紐状体の一部は外乱防止体に収容されていることを特徴とする請求項7または8記載の追従ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、動作制御システム、追従ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
工場等において同行者に並走しながら荷物の運搬を行う移動ロボットが知られている。このような移動ロボットとしては、たとえば特許文献1(特開2008-234404号公報)に示すようなものが提案されている。
【0003】
特許文献1には、同行者の動きをカメラで撮影し、撮影データを解析することで同行者の動き等を判断し、移動ロボットの動作制御を行う構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2008-234404号公報(請求項1―3、明細書段落0021―0028、図1―図3等)
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている移動ロボットによれば、カメラにより撮影した画像データに基づいて同行者の動作識別をしているため、画像データのデータ処理の負荷が高くなり、演算手段が高価になってしまうといった課題を有している。また、同行者を移動ロボットに先行させる場合、同行者の後姿を撮影した画像データに基づいて同行者の動作識別が行われることになる。しかしながら、同行者の後ろ姿を撮影した画像データは、同行者を正面側から撮影した画像データに対し、同行者を特定するための要素が大幅に減少してしまい、先行する同行者と移動ロボットとの間に入り込んだ非同行者を同行者と誤認してしまうおそれがある。
【課題を解決するための手段】
【0006】
そこで本発明は上記課題を解決するためのものであり、その目的は、動作制御システムおよび追従ロボットにおける画像データ処理の負荷を低減することで、制御システムおよび追従ロボットを安価に提供することを第1の目的としている。また、同行者と動作制御システムおよび追従ロボットの間に入り込んだ非同行者を同行者と誤認させることのない信頼性の高い動作制御システムおよび追従ロボットを提供することを第2の目的としている。
【0007】
上記目的を達成するため発明者が鋭意研究した結果、以下の構成に想到した。すなわち本発明は、紐状体と、前記紐状体の第1端部が係合される係合部と、前記係合部に係合された前記紐状体の基準位置における形状に対し、前記紐状体の第2端部側が移動した際における前記紐状体の第1方向から前記紐状体を臨んだ際の前記紐状体の形状変化および前記紐状体の第2方向から前記紐状体を臨んだ際の前記紐状体の形状変化をそれぞれ計測する計測手段と、前記第1方向から前記紐状体を臨んだ際の前記紐状体の形状変化に基づいて第1動作制御信号を生成すると共に前記第2方向から前記紐状体を臨んだ際の前記紐状体の形状変化に基づいて第2動作制御信号を生成する動作制御信号生成手段と、を具備することを特徴とする動作制御システムである。
【0008】
これにより、画像データ処理の負荷を低減することができ、動作制御システムを安価に提供することが可能になる。また、動作制御システムと同行者を紐状体で連結することで、動作制御システムは自らの同行者を常に正しく認識することが可能であって、動作制御システムの信頼性を高めることができる。
【0009】
また、前記第1方向と前記第2方向は、前記紐状体を長さ方向に計測可能であると共に互いに直交していることが好ましい。また、前記計測手段は、前記第1方向から前記紐状体の形状変化を計測する第1計測手段と、前記第2方向から前記紐状体の形状変化を計測する第2計測手段と、を有していることが好ましい。
【0010】
これらにより、第1動作制御信号と第2動作制御信号が正しく生成され、動作制御対象物を正しく動作制御することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
株式会社丸和製作所
入力機器
1か月前
スター精密株式会社
工作機械
4日前
株式会社豊田自動織機
荷役車両
1か月前
株式会社フジキン
流量制御装置
1か月前
株式会社シンテックホズミ
搬送ロボット
19日前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
物品搬送設備
23日前
国立大学法人広島大学
モデル誤差抑制補償器
9日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
トヨタ自動車株式会社
自律走行装置
9日前
チームラボ株式会社
走行システム及び走行路
2日前
日本精工株式会社
制御システムおよび制御方法
9日前
ローム株式会社
半導体装置
9日前
ミツミ電機株式会社
電源回路及びその起動方法
9日前
ブラザー工業株式会社
調整方法及び数値制御装置
1か月前
株式会社FUJI
工作機械
1か月前
ローム株式会社
定電圧生成回路
23日前
株式会社マキタ
作業ロボット
3日前
株式会社シマノ
人力駆動車の操作装置
1か月前
アズビル株式会社
保全システム
1か月前
株式会社エイトノット
情報処理システム
13日前
株式会社デジタルカレッジKAGA
物体搬送システム
23日前
トヨタ自動車株式会社
管理システム
23日前
大阪瓦斯株式会社
二次圧制御機構、及び制御方法
16日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
3日前
株式会社マキタ
自律移動システム
3日前
富士電機株式会社
制御装置、制御方法、及びプログラム
17日前
株式会社クボタ
フロントローダの操作機構及び作業車両
27日前
富士通株式会社
演算プログラム、演算方法、および情報処理装置
9日前
ダイハツ工業株式会社
車両用診断装置
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ