TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024104072
公報種別
公開特許公報(A)
公開日
2024-08-02
出願番号
2023008093
出願日
2023-01-23
発明の名称
位置決め機構
出願人
ユアサ商事株式会社
代理人
個人
,
個人
,
個人
主分類
B23Q
1/00 20060101AFI20240726BHJP(工作機械;他に分類されない金属加工)
要約
【課題】工場設備機器に対して、低コストで且つ簡単な作業でロボットユニットを位置決めして着脱自在に設置できる位置決め機構を提供する。
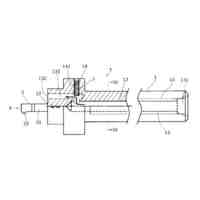
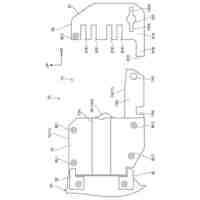
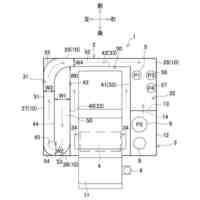
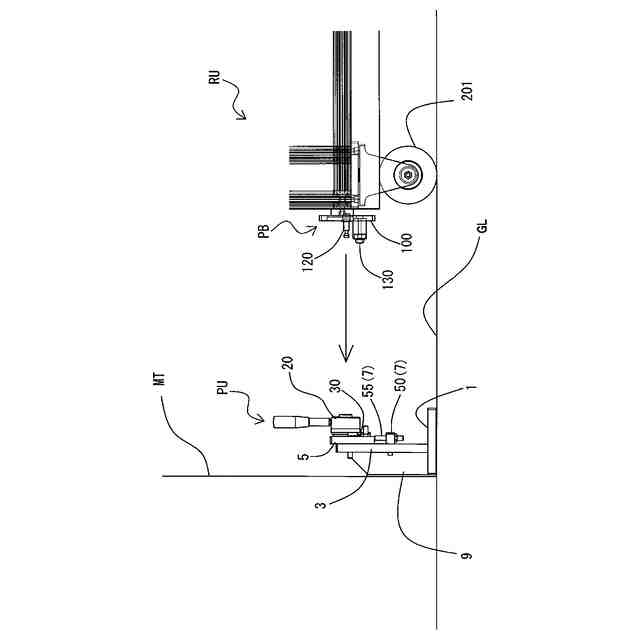
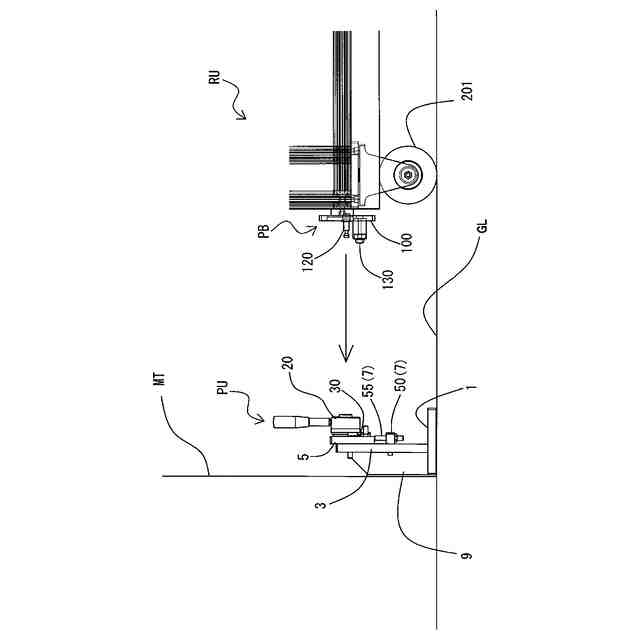
【解決手段】工場設備機器に対してロボットユニットRUを位置決めして設置する位置決め機構であって、ロボットユニットRUは、下端部に移動用キャスター201が設けられ、ロボットユニットRUの下端部に固定して取り付けられた位置決め板PBと、工場設備機器の設置位置に隣接する床面GLに固定して設置される位置決めユニットPUとを有し、位置決め板PBは、基板100と、基板100から突出するプルボルト120と、プルボルトを挟んだ両側の位置から突出する凸130を有し、位置決めユニットPUには、位置決め板PBのプルボルト120を引き込み固定する引き込みクランプ20と、位置決め板の凸部130が挿入されて嵌合する、一対の凹部30とが設けられている。
【選択図】図1
特許請求の範囲
【請求項1】
工場設備機器に対してロボットアームを備えたロボットユニットを位置決めして着脱自在に設置する位置決め機構であって、
前記ロボットユニットは、下端部に移動用キャスターが設けられ任意の位置に移動可能になっており、
前記ロボットユニットの下端部に固定して取り付けられた位置決め板と、
前記工場設備機器の設置位置に隣接する床面に固定して設置される位置決めユニットとを有し、
前記位置決め板は、前記ロボットユニットの下端部に固定され取り付けられる平板状の基板と、該基板の一方面のから突出するプルボルトと、該基板の一方面において該プルボルトを挟んだ両側の位置であって且つ該プルボルトよりも下方の位置から突出する、1対の凸部とを有し、
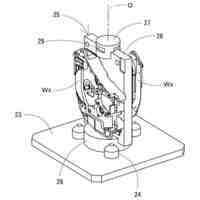
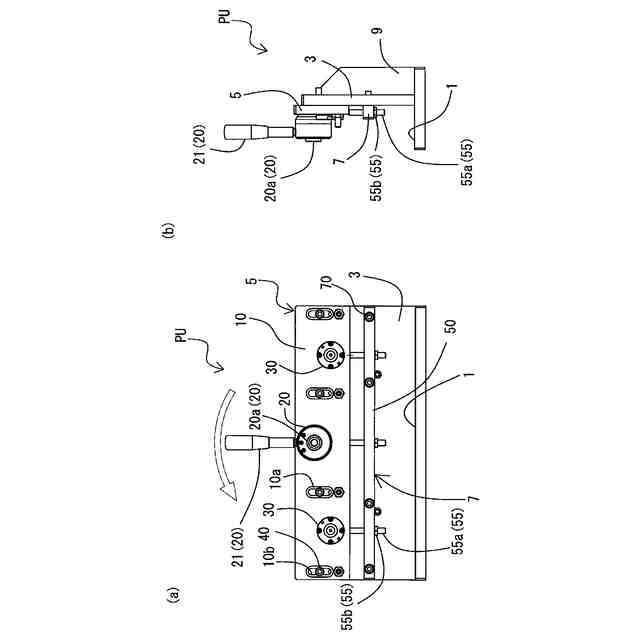
前記位置決めユニットは、前記床面に載置される底板部と、該底板部の上面から立設する垂直片部と、該垂直片部の一方面に支持されている位置決め部とを有し、
前記位置決め部には、前記プルボルトを引き込み固定するとともに該固定された前記プルボルトの固定を解除して押し出す引き込みクランプと、前記位置決め板の一対の凸部が挿入されて嵌合する、一対の凹部とが設けられ、
前記引き込みクランプが前記プルボルトを引き込み固定すると、その際に、前記ロボットユニットに固定されている位置決め板が該プルボルトの引き込まれる方向に付勢され、該位置決め板の凸部が前記位置決めユニットの凹部に挿入して嵌合し、工場設備機器に対する所定位置に前記ロボットユニットが位置決めされ固定され、
前記引き込みクランプが固定された前記プルボルトの固定を解除して押し出すと、その際に、前記ロボットユニットに固定されている位置決め板が該プルボルトの押し出される方向に付勢され、該位置決め板の凸部が前記位置決めユニットの凹部から離間する方向に押し出されて、前記ロボットユニットの固定が解除されて任意の位置に移動できるようになることを特徴とする位置決め機構。
続きを表示(約 1,200 文字)
【請求項2】
工場設備機器に対してワークを収容するストッカーユニットを位置決めして着脱自在に設置する位置決め機構であって、
前記ストッカーユニットは、下端部に移動用キャスターが設けられ任意の位置に移動可能になっており、
前記ストッカーユニットの下端部に固定して取り付けられた位置決め板と、
前記工場設備機器の設置位置に隣接する床面に固定して設置される位置決めユニットとを有し、
前記位置決め板は、前記ストッカーユニットの下端部に固定され取り付けられる平板状の基板と、該基板の一方面のから突出するプルボルトと、該基板の一方面において該プルボルトを挟んだ両側の位置であって且つ該プルボルトよりも下方の位置から突出する、1対の凸部とを有し、
前記位置決めユニットは、前記床面に載置される底板部と、該底板部の上面から立設する垂直片部と、該垂直片部の一方面に支持されている位置決め部とを有し、
前記位置決め部には、前記位置決め板の前記プルボルトを引き込み固定するとともに該固定されたプルボルトの固定を解除して押し出す引き込みクランプと、前記位置決め板の一対の凸部が挿入されて嵌合する、一対の凹部とが設けられ、
前記引き込みクランプが前記プルボルトを引き込み固定すると、その際に、前記ストッカーユニットに固定されている位置決め板が該プルボルトの引き込まれる方向に付勢され、該位置決め板の凸部が前記位置決めユニットの凹部に挿入して嵌合し、工場設備機器に対する所定位置に前記ストッカーユニットが位置決めされ固定され、
前記引き込みクランプが固定された前記プルボルトの固定を解除して押し出すと、その際に、前記ストッカーユニットに固定されている位置決め板が該プルボルトの押し出される方向に付勢され、該位置決め板の凸部が前記位置決めユニットの凹部から離間する方向に押し出されて、前記ストッカーユニットの固定が解除されて任意の位置に移動できるようになることを特徴とする位置決め機構。
【請求項3】
前記位置決め部は、平板状の基部を有し、該基部が前記垂直片部の一方面に支持されており、
前記基部の一方面には、前記引き込みクランプと1対の前記凹部とが設けられており、
前記引き込みクランプは、前記プルボルトが挿嵌される孔部と、該孔部に該プルボルトを引き込み固定したり、該孔部に引き込まれて固定された該プルボルトの固定を解除して押し出したりするレバーとを有していることを特徴とする請求項1又は2に記載の位置決め機構。
【請求項4】
前記位置決めユニットは、前記位置決め部の上下方向の位置を調節する位置調節機構が設けられていることを特徴とする請求項1又は2に記載の位置決め機構。
【請求項5】
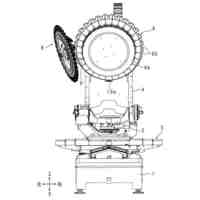
前記工場設備機器には、工作機械、三次元測定器、コンベア及び成形機のいずれかであることを特徴とする請求項1又は2に記載の位置決め機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置決め機構に関し、例えば、工作機械やコンベア等の工場設備機器にロボットユニット或いはストッカーユニットを位置決めして着脱自在に設置する位置決め機構に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
工場において、ワークを加工する工作機械から、加工されたワークを取り出してストッカーに収納する工程を行わせる場合、工作機械の横に、常設で、ロボットシステムを設置することが行われている。このロボットシステムは、工作機械の横の床面に基礎工事をして設置された強固な架台と、架台の上に固定されたロボットアームと、架台の上に固定されたストッカーとを備えている。そして、ロボットアームが工作機械から加工されたワークを取り出し、ストッカーにワークを収納していくことが行われている。
【0003】
上記のような、工作機械の横に、常設でロボットシステムを設置する方法は、工作機械を調整する際に、ロボットシステムが邪魔になり、十分な作業エリアが確保されず、作業者に大きな労力負担をかけるという課題が生じている。また、上記の方法は、工作機械の横に、常設でロボッットシステムが設置されているため、ロボットシステムを使用しないで、作業者が工作機械に対して、細かい操作をしてワークを加工し、作業者自身が工作機械からワークを取り出すような作業に対応することができない。
さらに、上記の方法は、工作機械の横の床面に基礎工事をして強固な架台を作る作業が必要であるため、設置労力も設置コストもかかるという課題も有している。
【0004】
そして、上記のような、工作機械の横にロボットシステムを固定して設置することによる不具合を解消するための技術として、例えば、特許文献1には、工作機械に対して移動可能に設置した工作機械用ロボットユニットが開示されている。
【0005】
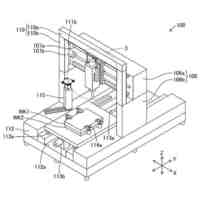
この工作機械用ロボットユニットは、工作機械が設置された床面に工作機械と平行に敷設されたガイドレールと、ガイドレールに沿ってスライド可能なブロックと、下面部がブロックに固定された架台とを備え、架台の上面に、ロボットアームと、交換爪ストック部と、ハンドストック部と、被加工物ストック部とが設置されている。
また、上記の工作機械は、加工空間を有し、ドアを開くと加工空間が開口するようになっている。また、加工空間内には、被加工物を固定及び固定解除するためのチャッックと、被加工物を把持するためにチャックに取り付けられるチャック爪とが設けられている。
【0006】
また、ガイドレールは、工作機械の横方向の長さ寸法と略同じ長さ寸法で、工作機械の横方向の一端部から所定長さ寸法だけ横方向にずらして設置されている(引用文献1の図1参照)。
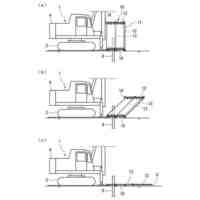
上記の工作機械用ロボットユニットは、ガイドレールに沿って、工作機械の加工空間と相対向する開口位置(引用文献1の図1(a))と、開口位置から離れた退避位置(引用文献1の図1(b))との間で移動可能になっている。
そして、特許文献1に記載の工作機械用ロボットは、例えば、工作機械を調整したい場合等には、ロボットユニットを退避位置に移動させることで、工作機械の加工空間の開口位置の前の空間を空けることができ、作業者が工作機械に接近して段取り作業等を行うことができるようになっている。
【先行技術文献】
【特許文献】
【0007】
特開2022-72913号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、特許文献1に記載の工作機械用ロボットユニットは、工作機械に対して横方向に平行に移動させて、工作機械の加工空間の開口位置の前を空けることをできるようにしたものであり、工作機械の前方や周囲を全面的に空けることはできない。
そのため、特許文献1に記載の発明は、工作機械用ロボットユニットを使用しないで、作業者が工作機械に対して、細かい操作をしてワークを加工し、作業者自身が工作機械からワークを取り出すような作業をする際に、必ずしも、十分に作業エリアを確保できるものではない。
また、特許文献1に記載の工作機械用ロボットユニットは、特定の工作機械に隣接して敷設されたガイドレールに沿って、開口位置と、退避位置との間を移動できる構成が採用され、特定の工作機械に対して専用で用いることを想定している。すなわち、特許文献1に記載の工作機械用ロボットは、任意の位置に移動できる構成ではないため、工場の別の場所に設置されている「他の工作機械」や「他の工場設備機器(三次元測定機、コンベア等)に汎用的に利用することを考慮していない。
【0009】
また、特許文献1に記載の工作機械用ロボットは、床面にガイドレールを敷設する工事が必要であり、設置コストが嵩むという課題も有している。なお、特許文献1に記載の工作機械用ロボットにおいて、工作機械の前方や周囲を全面的に開放させるために、床面に長い距離寸法のガイドレールを敷設する方法も考えられるが、この方法では、さらに、設備コストが嵩むとともに、長い距離寸法のガイドレールが工場内の他の作業の邪魔になるという別の課題も生じる。
なお、特許文献1に記載工作機械用ロボットは、工作機械の加工空間の開口位置に配置した際に、工作機械との位置調整が必要になると思われるが、それについての具体的な構成の開示はなされていない。
【0010】
本発明は、上記課題に鑑みてなされたものであり、その目的は、工作機械やコンベア等の工場設備機器に対して、低コストで且つ簡単な作業でロボットユニット或いはストッカーユニットを位置決めして着脱自在に設置できる位置決め機構を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
作業用治具
2か月前
個人
トーチノズル
2か月前
日東精工株式会社
検査装置
2か月前
個人
コンタクトチップ
3か月前
日東精工株式会社
組み付け装置
2か月前
シヤチハタ株式会社
組立ライン
2か月前
有限会社津谷工業
切削工具
1か月前
株式会社不二越
タップ
1か月前
エンシュウ株式会社
工作機械
2か月前
株式会社ダイヘン
アーク溶接制御方法
1か月前
トヨタ自動車株式会社
積層コア
7日前
株式会社ダイヘン
インチング制御方法
3か月前
ダイハツ工業株式会社
冷却構造
2か月前
ブラザー工業株式会社
工作機械
3か月前
株式会社メドメタレックス
ドリル
6日前
旭精工株式会社
シャフトブレーキ
3か月前
株式会社不二越
歯車研削盤
1か月前
株式会社不二越
歯車加工機
1か月前
株式会社ダイヘン
アークスタート制御方法
3か月前
サムテック株式会社
加工物製造方法
6日前
トヨタ自動車株式会社
位相測定方法
6日前
津田駒工業株式会社
工作機械用の主軸装置
2か月前
株式会社メタルクリエイト
切削装置
2か月前
住友重機械工業株式会社
レーザ装置
1か月前
株式会社浪速試錐工業所
防風カバー
1か月前
株式会社FUJI
自動化用パレット
22日前
株式会社ヤマダスポット
抵抗溶接機
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社不二越
工具の製造方法
7日前
工機ホールディングス株式会社
作業機
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
ブラザー工業株式会社
工作機械
2か月前
エンシュウ株式会社
摩擦撹拌接合装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
オークマ株式会社
切削液循環装置
3か月前
株式会社ダイヘン
2重シールドティグ溶接方法
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ