TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024102553
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006522
出願日
2023-01-19
発明の名称
ハンド部及びロボットシステム
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20240724BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】よりシンプルな構造のハンド部が必要とされている。
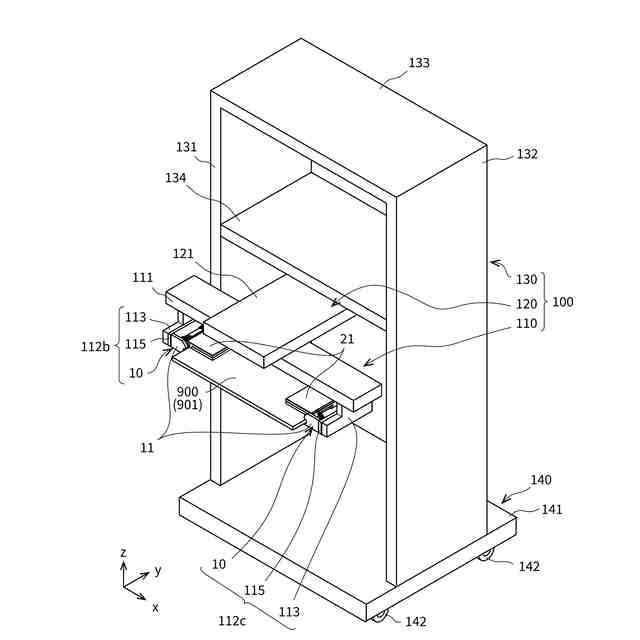
【解決手段】ハンド部10は、ベース11と、ベース11に対して回転軸41を中心に回転可能な回転部材21とを備え、回転部材21は、回転軸41に沿う軸方向から見て第一方向に延びる第一部分22と、軸方向から見て第一方向とは異なる第二方向に延びる第二部分25とを有し、第二部分25は、第一部分22がベース11に対向するような姿勢である状態で、ベース11から第一部分22に向かう方向においてベース11と第一部分22との間に位置するように構成されており、対象物の板状部が第二部分25に近づく方向に変位して第二部分25に接触するのに伴って回転部材21が回転し、ベース11と第一部分22との間で板状部を挟持する挟持状態となるように構成されている。アクチュエータを用いずに板状部を有する対象物を把持可能である。
【選択図】図2
特許請求の範囲
【請求項1】
対象物を把持するハンド部に加わる力を検知する力センサを有するロボットシステムにおいて、板状部を有する対象物を把持するために用いられるハンド部であって、
ベースと、
前記ベースに対して回転軸を中心に回転可能な回転部材とを備え、
前記回転部材は、前記回転軸に沿う軸方向から見て第一方向に延びる第一部分と、軸方向から見て第一方向とは異なる第二方向に延びる第二部分とを有し、
前記第二部分は、前記第一部分が前記ベースに対向するような姿勢である状態で、前記ベースから前記第一部分に向かう方向において前記ベースと前記第一部分との間に位置するように構成されており、
前記ベースと前記第一部分との間において前記対象物の板状部を配置可能な開放状態から、前記板状部が前記第二部分に近づく方向に変位して前記第二部分に接触するのに伴って前記回転部材が前記ベースに対して回転し、前記ベースと前記第一部分との間で前記板状部を挟持する挟持状態となるように構成されている、ハンド部。
続きを表示(約 450 文字)
【請求項2】
前記第一部分のうち、前記ベースに対向する面には、前記板状部との間の摩擦係数が前記第一部分の他の部位と前記板状部との間の摩擦係数よりも大きくなるように構成された滑止部が形成されている、請求項1に記載のハンド部。
【請求項3】
前記滑止部は、前記挟持状態において当該板状部の表面に接触可能なゴム製の部位である、請求項2に記載のハンド部。
【請求項4】
前記第二部分に前記板状部が接触していない状態において前記開放状態が維持されるように前記回転部材を付勢する付勢部材を備える、請求項1に記載のハンド部。
【請求項5】
2つの、請求項1から4のいずれか1項に記載のハンド部と、
前記2つのハンド部のそれぞれが取り付けられており、互いに左右に離れて配置された2つのアーム部と、
前記アーム部を変位させて前記2つのハンド部間の距離を変化させる移動部と、
前記ハンド部に掛かる力を検出可能な力センサとを備える、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、板状部を有する対象物を把持するハンド部及びロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、製造現場などにおいて、人間では搬送することが困難な重量の搬送対象物、例えば、溶接の治具やプラズマ電源等の機材や、ワーク等を搬送したいという要望がある。そのような搬送対象物を搬送するため、フォークリフトを用いることも考えられるが、フォークリフトで搬送するほど搬送対象物の重量が大きくないこともある。また、搬送対象物がパレットに載置されていない場合には、フォークリフトで搬送することが困難である。
【0003】
このような要望、特に板状部を有するような対象物を対象とする用途について、対象物を把持するハンド部を設けたロボットシステムが種々提案されている。
【0004】
例えば、下記特許文献1や特許文献2には、双腕を適切な位置に配置してから両方のハンドにつけてある軸を動作させることで板状の部材を掴むようにする双腕ロボットの制御手法が記載されている。
【0005】
なお、下記特許文献3には、複数のハンドを有する双腕ロボットの例が記載されている。このような双腕ロボットは、様々な構成のアームを用いるものであり、複雑な組立作業等には有用である。
【先行技術文献】
【特許文献】
【0006】
特開2010-228022号公報
特開2010-228024号公報
特開2011-115877号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記の特許文献1や特許文献2に記載されているような双腕ロボットとその制御手法を用いる場合、それぞれのハンド部においてアクチュエータを搭載する必要がある。また、この場合、ハンド部を含めた制御が複雑になるという問題がある。
【0008】
また、上記特許文献3に記載されている双腕ロボットのような複雑な構成は、例えば搬送対象物を把持し搬送するような比較的シンプルなタスクを目的とする場合には不要である。すなわち、よりシンプルな構造のハンド部を用いることができることが望ましい。また、例えば搬送対象物を搬送する目的に利用される場合、ハンド部の構成が複雑であって比較的重いと、可搬重量が低下させる要因となってしまうことも問題である。
【0009】
本発明は、上記課題を解決するためになされたものであり、シンプルな構造を有し、板状部を有する対象物を把持することができるハンド部及びロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本第一の発明のハンド部は、対象物を把持するハンド部に加わる力を検知する力センサを有するロボットシステムにおいて、板状部を有する対象物を把持するために用いられるハンド部であって、ベースと、ベースに対して回転軸を中心に回転可能な回転部材とを備え、回転部材は、回転軸に沿う軸方向から見て第一方向に延びる第一部分と、軸方向から見て第一方向とは異なる第二方向に延びる第二部分とを有し、第二部分は、第一部分がベースに対向するような姿勢である状態で、ベースから第一部分に向かう方向においてベースと第一部分との間に位置するように構成されており、ベースと第一部分との間において対象物の板状部を配置可能な開放状態から、板状部が第二部分に近づく方向に変位して第二部分に接触するのに伴って回転部材がベースに対して回転し、ベースと第一部分との間で板状部を挟持する挟持状態となるように構成されている、ハンド部である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
2か月前
個人
関節モジュール
1か月前
個人
寸切りボルト回し
1か月前
個人
スロットルトリガー
2か月前
中国電力株式会社
腰袋
5か月前
コクヨ株式会社
補助器具
1か月前
太陽工業株式会社
チャック装置
1か月前
日東工器株式会社
衝撃工具
3か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
個人
メンテナンス用スタンド
3か月前
トヨタ自動車株式会社
ロボット
2か月前
川崎重工業株式会社
罫書用治具
4か月前
株式会社マキタ
動力工具
4か月前
オムロン株式会社
電動把持工具
1か月前
学校法人立命館
グリッパ
1か月前
東京計器株式会社
接触検知装置
2か月前
CKD株式会社
把持装置
2か月前
トヨタ自動車株式会社
ハンド構造
4か月前
個人
容器引っ掛け棒およびその使用方法
3か月前
株式会社ハーモ
開閉チャック装置
2か月前
株式会社ダイヘン
搬送装置
5か月前
白山工業株式会社
ロボットアーム
1か月前
株式会社ダイヘン
搬送装置
5か月前
株式会社ダイヘン
搬送装置
18日前
個人
回転工具およびバリ取り部品
2か月前
国立大学法人山形大学
二重関節機構
4か月前
株式会社大林組
ロッカー装置
2か月前
株式会社スター精機
把持装置
1か月前
宮川工機株式会社
板状部品移動装置
5か月前
川崎重工業株式会社
ロボット
1か月前
国立大学法人佐賀大学
協働システム
2か月前
トヨタ自動車株式会社
締付判定方法
2か月前
SMC株式会社
グリッパ
4日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ