TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024102552
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006521
出願日
2023-01-19
発明の名称
ロボットハンド及びロボットシステム
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20240724BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来のロボットハンドにおいては、対象物への作用に関する状態を適切に把握することが困難であった。
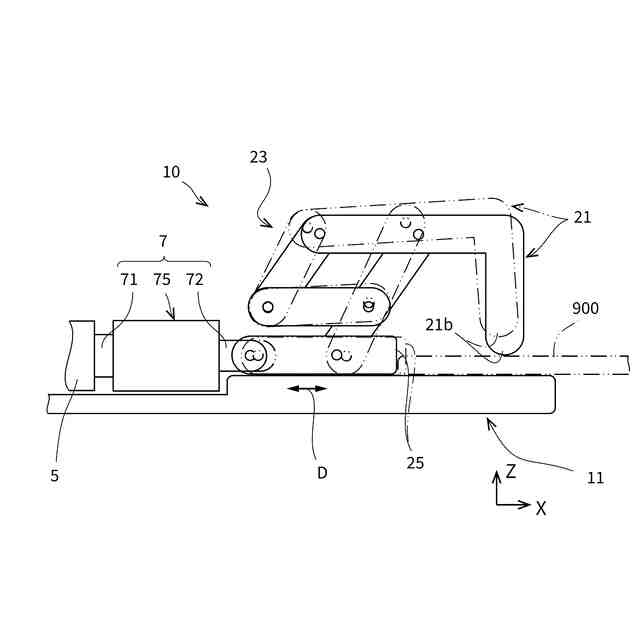
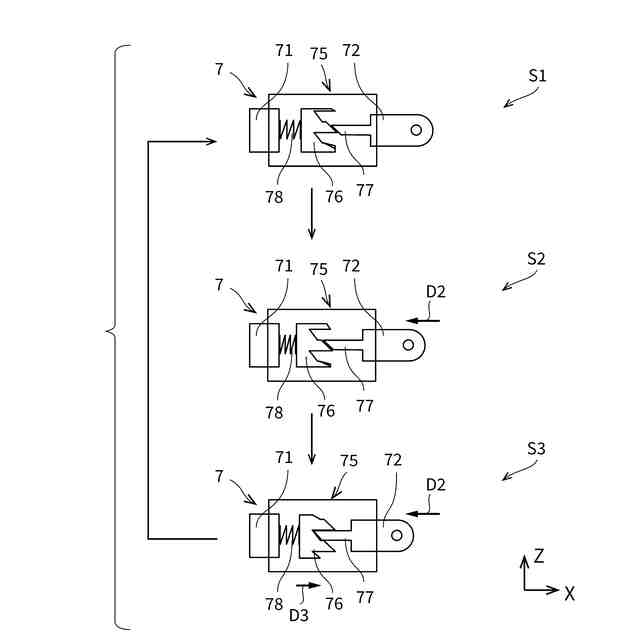
【解決手段】ロボットハンド2は、対象物900への作用に伴って変化する力を検知する力センサ5と共に用いられる。ロボットハンド2は、対象物900に接触する接触部27を有するハンド部10と、力センサ5と接触部27とに接続されており、接触部27に加わった力の変化に応じて力センサ5により検知される力が変化するように接触部27に加わった力を伝達する伝達部7とを備える。伝達部7は、接触部27の力センサ5に対する位置が所定の範囲にある場合において、接触部27の変位に伴って力センサ5に伝達する力を非線形に変化させるように構成されている。ロボットハンド2により、接触部27の力センサ5に対する位置が所定の範囲にあるか否かを容易に検出可能になる。
【選択図】図2
特許請求の範囲
【請求項1】
対象物への作用に伴って変化する力を検知する力センサと共に用いられるロボットハンドであって、
前記対象物に接触する接触部を有するハンド部と、
前記力センサと前記接触部とに接続されており、前記接触部に加わった力の変化に応じて前記力センサにより検知される力が変化するように前記接触部に加わった力を伝達する伝達部とを備え、
前記接触部は、前記力センサに対して所定の方向において変位可能であり、
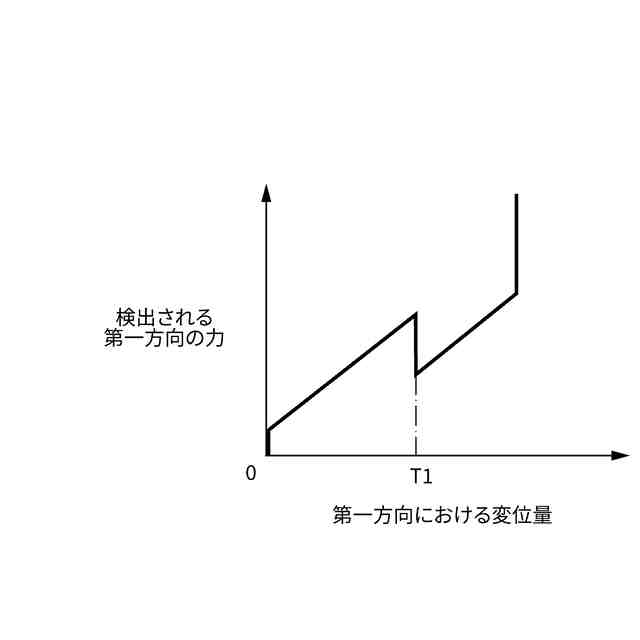
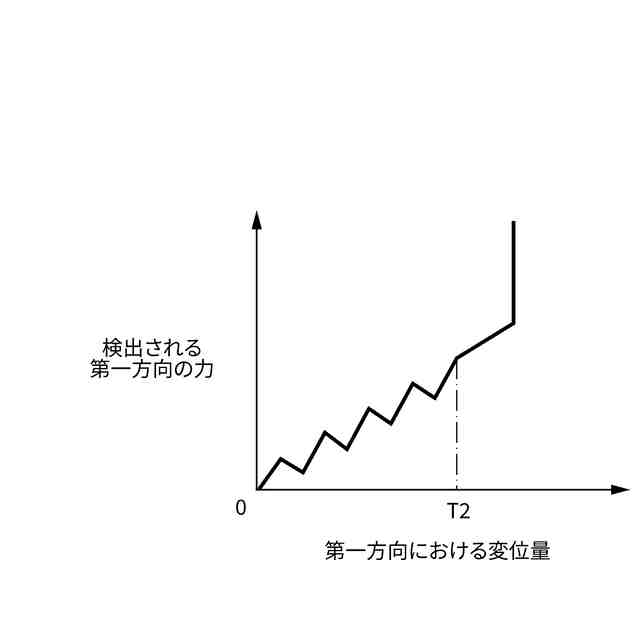
前記伝達部は、前記接触部の前記力センサに対する位置が所定の範囲にある場合において、前記接触部の変位に伴って前記力センサに伝達する力を非線形に変化させるように構成された伝達力変化手段を有している、ロボットハンド。
続きを表示(約 620 文字)
【請求項2】
前記伝達力変化手段は、前記接触部の前記力センサに対する位置が所定の範囲にある場合においてクリック感を発生させて、当該クリック感を前記力センサに伝達するように構成されている、請求項1に記載のロボットハンド。
【請求項3】
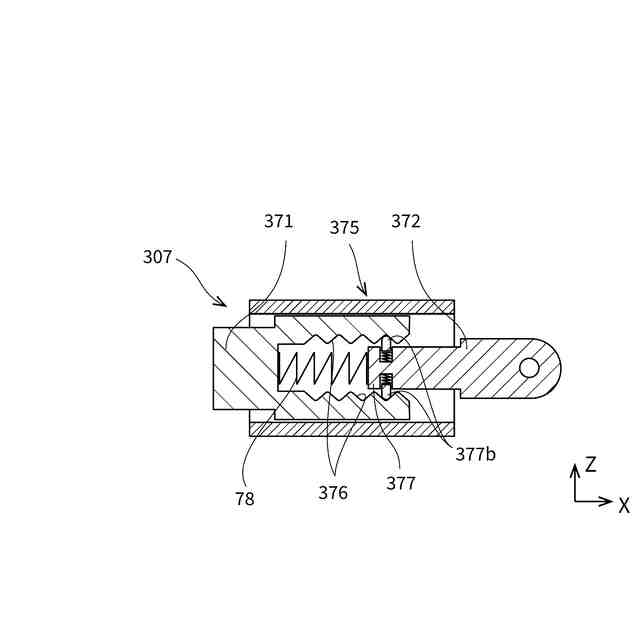
前記伝達部は、前記力センサに接続される第一構造と、前記接触部と共に前記第一構造に対して変位可能な第二構造とを有し、
前記第一構造及び前記第二構造は、前記伝達力変化手段に接続されており、
前記伝達力変化手段は、複数の歯と、当該複数の歯のうち少なくとも1つに係合する係合部とを有し、前記第一構造に対する前記第二構造の位置の変化に応じて前記複数の歯と前記係合部との係合状態が変化するように構成されている、請求項1に記載のロボットハンド。
【請求項4】
前記ハンド部は、前記接触部が前記対象物に接触して前記力センサに対して所定の方向において変位するのに伴って前記対象物に近づくように構成された作用部を有する、請求項1に記載のロボットハンド。
【請求項5】
請求項1から4のいずれか1項に記載のロボットハンドを少なくとも2つ備え、
前記各ロボットハンドのハンド部同士が、第一方向において対向するように配置されており、
前記対象物に対して前記各ハンド部を同時に近づけて作用することが可能に構成された、双腕型の、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物に対して作用するロボットハンド及びロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、製造現場などにおいて対象物に対して種々の作用を行うためのロボットシステムが用いられている。このようなロボットシステムとして、対象物に対して接触したり、対象物に対して用いる種々の用具を把持等したりするためのロボットハンドを有するものがある。ロボットハンドを有するロボットシステムにおいて、ロボットハンドに加わる力を検知するための力センサが用いられることがある。例えば、力センサの検知結果に応じて、ロボットハンドの位置や動き等の制御を行うことができる。
【0003】
例えば、下記特許文献1には、ロボットを用いた嵌合作業中に発生する詰まりの対象に関し、力センサを用いて勘合部品の詰まりを検知する手法が記載されている。
【0004】
また、下記特許文献2には、ハンドを用いて把持した部品をワークに組みつける組付装置において、力センサによって障害物を検知し、部品の組付穴の探索軌道を変更するようにすることが記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2005-28532号公報
特開平8-197342号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ロボットハンドを用いて、上述のように力センサを使って対象物への作用に関する状態を把握しながら制御を行うことにより、把持や嵌合などのタスクを実現する場面では、制御の難易度が高くなる場合があるという問題がある。すなわち、一般的に、力センサで検知される力には、例えば摩擦力などの、状況によって変化する推定しにくい力が含まれる場合がある。このような、検知目的となる力とは異なる要因の力が力センサで合わせて検知される場合、対象物への作用に関する状態を適切に把握することが困難になる場合がある。そのため、力センサの検知結果に基づく制御を適切に行うことが困難になる場合がある。
【0007】
本発明は、上記課題を解決するためになされたものであり、対象物への作用に関する状態を適切に把握しやすいロボットハンド及びロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本第一の発明のロボットハンドは、対象物への作用に伴って変化する力を検知する力センサと共に用いられるロボットハンドであって、対象物に接触する接触部を有するハンド部と、力センサと接触部とに接続されており、接触部に加わった力の変化に応じて力センサにより検知される力が変化するように接触部に加わった力を伝達する伝達部とを備え、接触部は、力センサに対して所定の方向において変位可能であり、伝達部は、接触部の力センサに対する位置が所定の範囲にある場合において、接触部の変位に伴って力センサに伝達する力を非線形に変化させるように構成された伝達力変化手段を有している、ロボットハンドである。
【0009】
かかる構成により、接触部の力センサに対する位置が所定の範囲にあるか否かを容易に検出可能になり、対象物への作用に関する状態を適切に把握することができる。
【0010】
また、本第二の発明のロボットハンドは、第一の発明に対して、伝達力変化手段は、接触部の力センサに対する位置が所定の範囲にある場合においてクリック感を発生させて、クリック感を力センサに伝達するように構成されている、ロボットハンドである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
20日前
個人
関節モジュール
7日前
個人
寸切りボルト回し
3日前
個人
スロットルトリガー
17日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
5か月前
日東工器株式会社
動力工具
24日前
日東工器株式会社
動力工具
24日前
日東工器株式会社
動力工具
24日前
日東工器株式会社
衝撃工具
2か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
動力工具
24日前
個人
メンテナンス用スタンド
1か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
10日前
CKD株式会社
把持装置
17日前
株式会社マキタ
動力工具
3か月前
川崎重工業株式会社
罫書用治具
3か月前
トヨタ自動車株式会社
ロボット
1か月前
個人
回転工具およびバリ取り部品
1か月前
白山工業株式会社
ロボットアーム
14日前
個人
容器引っ掛け棒およびその使用方法
1か月前
トヨタ自動車株式会社
ハンド構造
2か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
東京都公立大学法人
ロボットハンド
4か月前
川崎重工業株式会社
ロボット
10日前
トヨタ自動車株式会社
締付判定方法
26日前
株式会社大林組
ロッカー装置
1か月前
株式会社日本キャリア工業
ロボットハンド
1か月前
国立大学法人山形大学
二重関節機構
3か月前
宮川工機株式会社
板状部品移動装置
3か月前
国立大学法人佐賀大学
協働システム
18日前
CKD株式会社
電動把持装置
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ