TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024100375
公報種別
公開特許公報(A)
公開日
2024-07-26
出願番号
2023004331
出願日
2023-01-16
発明の名称
安全作業システム
出願人
株式会社日立ビルシステム
代理人
ポレール弁理士法人
主分類
B66B
7/00 20060101AFI20240719BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】 据付工事中の昇降路内に進入する作業員の安全を確保しつつ、昇降路内に設置した作業システムの作業効率低下を抑制できる、安全作業システムを提供する。
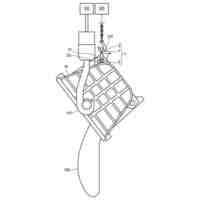
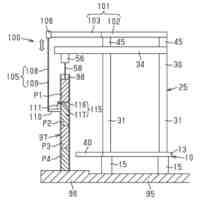
【解決手段】 昇降路内を昇降しながら施工作業を実施する作業システムの移動または作業を、人検出システムの出力に応じて制御する安全作業システムであって、人検出システムは、出入口から昇降路内に進入する人を検出する人検出センサと、作業システムと通信する無線機器と、を備え、作業システムは、昇降路内での移動に利用する移動機構と、昇降路内での作業に利用する作業機構と、人検出システムと通信する無線機器と、移動機構と作業機構を制御する制御装置と、を備え、制御装置は、人検出センサの出力に基づいて検出した人の位置情報と、位置センサの出力に基づいて検出した作業システムの位置情報と、の位置関係に基づき、移動機構と作業機構の制御を制限する安全作業システム。
【選択図】 図5
特許請求の範囲
【請求項1】
昇降路内を昇降しながら施工作業を実施する作業システムの移動または作業を、人検出システムの出力に応じて制御する安全作業システムであって、
前記人検出システムは、
出入口から昇降路内に進入する人を検出する人検出センサと、
前記作業システムと通信する無線機器と、を備え、
前記作業システムは、
前記昇降路内での移動に利用する移動機構と、
前記昇降路内での作業に利用する作業機構と、
前記人検出システムと通信する無線機器と、
前記移動機構と前記作業機構を制御する制御装置と、を備え、
該制御装置は、
前記人検出センサの出力に基づいて検出した前記人の位置情報と、
位置センサの出力に基づいて検出した前記作業システムの位置情報と、
の位置関係に基づき、前記移動機構と前記作業機構の制御を制限することを特徴とする安全作業システム。
続きを表示(約 970 文字)
【請求項2】
前記制御装置は、
前記移動機構の制御として、動作停止、移動速度制限、動作可能のいずれかを選択し、
前記作業機構の制御として、動作停止、動作可能のいずれかを選択することを特徴とする、請求項1に記載の安全作業システム。
【請求項3】
前記制御装置は、
前記作業システムの位置が前記人の位置より高い場合は、前記移動機構と前記作業機構の制御として動作停止を選択し、
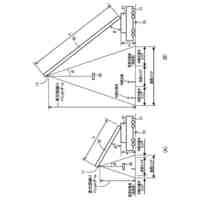
前記作業システムの位置が前記人の位置より低い場合は、前記作業システムと前記人との距離に応じて、前記移動機構の制御として移動速度制限または動作可能を選択することを特徴とする、請求項2に記載の安全作業システム。
【請求項4】
前記位置センサは、
前記作業システムに設置されたレーザ距離計、または、前記移動機構に取り付けられた回転計測計であることを特徴とする、請求項1に記載の安全作業システム。
【請求項5】
前記人検出システムは、前記出入口に取り付けられていることを特徴とする、請求項1に記載の安全作業システム。
【請求項6】
前記人検出システムは、前記制御装置からの指令に応じて、前記人に警告する通知装置を備えることを特徴とする、請求項1に記載の安全作業システム。
【請求項7】
前記通知装置は、音声発生装置、または、表示装置であることを特徴とする、請求項6に記載の安全作業システム。
【請求項8】
前記人検出センサは、人感センサ、レーザ距離センサ、赤外線距離センサ、超音波センサ、インターロックスイッチのいずれかであることを特徴とする、請求項1に記載の安全作業システム。
【請求項9】
前記人検出センサは、画像を撮影するカメラであることを特徴とする、請求項1に記載の安全作業システム。
【請求項10】
前記人検出システムは、人がいない状態の背景画像と、撮影した画像と比較することで、人が存在するエリアを検出し、該エリアが進入禁止エリアと重なる場合に、撮影した人を前記昇降路内に進入する人として検出することを特徴とする、請求項9に記載の安全作業システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、エレベータの昇降路内での施工作業に作業システムを用いる場合に、作業員の安全確保と、作業システムの作業効率維持を両立させる、安全作業システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
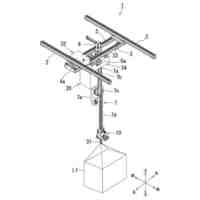
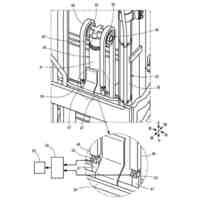
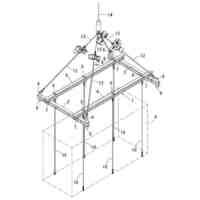
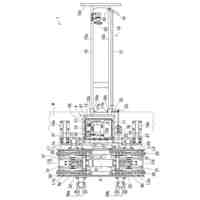
エレベータ据付工事中の昇降路内には、作業床等の重量物が昇降路上部から揚重されている。従来は、昇降路内での壁への穴あけや部材(アンカーなど)の固定といった施工作業を作業床に乗った作業員が実施していたが、作業員が作業床から転落したり、落下物や装置と接触したりする等の事故リスクがあるため、近年は、昇降路内での施工作業の一部を、作業床上に設置した機械やロボットに自動実施させる作業システムが普及しつつある。
【0003】
この種の作業システムに関し、特許文献1には、昇降路の壁面と穴開け工具の軸の交わる角度を検出し、検出角度に基づいて穴開け工具の傾きを調整することで、壁面に対して垂直に穴あけを実施する、エレベータ据付装置が記載されている。そして、このエレベータ据付装置により、昇降路の壁面形状の測定データに影響されることなく、昇降路の壁面に垂直にブラケットを固定するための穴を形成できることが記載されている。
【0004】
特許文献1のような作業システムの利用により、昇降路内での作業員による作業をある程度削減できるが、作業システムでは対応できない施工作業も存在するため、作業システムを利用する場合であっても作業員が昇降路内に進入しなければならない状況も残っている。そのため、作業システムの制御時には、高さ方向に複数存在する出入口の任意の出入口から昇降路に進入しうる作業員の安全に対する配慮が必要となる。
【0005】
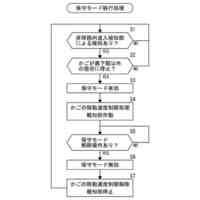
また、昇降路内の作業員の安全に配慮した従来技術として、特許文献2が知られている。例えば、同文献の要約書には、課題として「ピット内に保守員などが居るとき、これを自動的に検出して、乗りかごの運転を規制し、釣り合い重りの下部などがピット内の保守員などに接触しないようにする。」と記載されており、解決手段として、「人検出センサ(焦電型赤外線センサ、透過型光電センサ、反射型光電センサ、超音波センサなどのセンサ)4によって、ピット16内に保守員18が居るかどうかを直接、検出させ、ピット16内に保守員18が居るときには、乗りかご2が最上階に行かないように、乗りかご2の運転を規制して、釣り合い重り4がピット16内に入り込まないようにする。」と記載されている。すなわち、特許文献2には、人検出センサを用いて、乗りかごの上下動を運転制御するエレベータの運転制御システムが記載されている。
【先行技術文献】
【特許文献】
【0006】
特開2020-7095号公報
特開2013-220895号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献2の運転制御システムは、エレベータ据付後の利用を想定したシステムであるため、作業システムを用いたエレベータ据付工事中に、作業システムによる穴あけ作業に伴い壁の破片が落下したり、ドアのない出入口から作業員が昇降路内を随時覗き込んだりするような、多様な状況での作業員の安全確保については言及がない。作業員が昇降路へ進入したときに、エレベータ据付工事中の作業システムを全停止することで作業員の安全を確保する方法も考えられるが、この場合、作業システムの作業効率が大幅に悪化するという問題がある。
【0008】
そこで、本発明の目的は、据付工事中の昇降路内に進入する作業員の安全を確保しつつ、昇降路内に設置した作業システムの作業効率低下を抑制できる、安全作業システムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明の安全作業システムは、昇降路内を昇降しながら施工作業を実施する作業システムの移動または作業を、人検出システムの出力に応じて制御する安全作業システムであって、前記人検出システムは、出入口から昇降路内に進入する人を検出する人検出センサと、前記作業システムと通信する無線機器と、を備え、前記作業システムは、前記昇降路内での移動に利用する移動機構と、前記昇降路内での作業に利用する作業機構と、前記人検出システムと通信する無線機器と、前記移動機構と前記作業機構を制御する制御装置と、を備え、該制御装置は、前記人検出センサの出力に基づいて検出した前記人の位置情報と、位置センサの出力に基づいて検出した前記作業システムの位置情報と、の位置関係に基づき、前記移動機構と前記作業機構の制御を制限する安全作業システムとした。
【発明の効果】
【0010】
本発明の安全作業システムによれば、据付工事中のエレベータ昇降路内に進入する作業員の安全を確保しつつ、昇降路内に設置した作業システムの作業効率低下を抑制することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
1か月前
ユニパルス株式会社
吊具
8か月前
ユニパルス株式会社
吊具
3か月前
ユニパルス株式会社
吊具
8か月前
個人
吊りバケット装置
10か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
荷役車両
2か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
10か月前
株式会社ノセ技研
バケット
10か月前
株式会社アイセイ
搬送装置
11か月前
株式会社北川鉄工所
吊荷制御方法
7か月前
ユニパルス株式会社
荷役助力装置
5か月前
株式会社日本キャリア工業
昇降機
1か月前
個人
建築部材の吊り上げ装置
3日前
フジテック株式会社
エレベータ
8か月前
株式会社大林組
養生方法
21日前
フジテック株式会社
エレベータ
8か月前
株式会社豊田自動織機
フォークリフト
3か月前
フジテック株式会社
エレベータ
9か月前
大同特殊鋼株式会社
治具
6か月前
株式会社ニシキ
可変型吊り天秤
5か月前
ブラザー工業株式会社
架台
3か月前
ブラザー工業株式会社
架台
3か月前
ウエダ産業株式会社
鋼板保持装置
2か月前
フジテック株式会社
乗客搬送装置
8か月前
株式会社キトー
吊具
1か月前
株式会社タダノ
高所作業車
8日前
白山工業株式会社
腕重量補償機構
8日前
小野谷機工株式会社
ジャッキ装置
3か月前
株式会社タダノ
クレーン装置
3か月前
株式会社大林組
作業システム
21日前
株式会社タダノ
クレーン装置
11か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ