TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023157090
公報種別
公開特許公報(A)
公開日
2023-10-26
出願番号
2022066764
出願日
2022-04-14
発明の名称
搬送装置
出願人
株式会社アイセイ
代理人
個人
主分類
B66C
13/22 20060101AFI20231019BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】搬送対象物を目標位置に効率良くかつ精度良く搬送することができる搬送装置を提供すること。
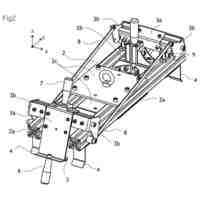
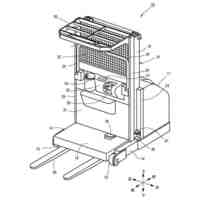
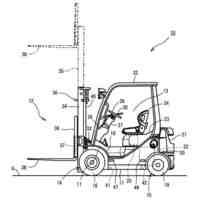
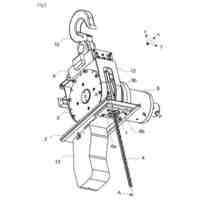
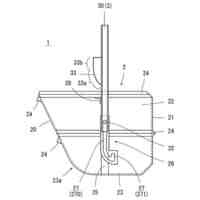
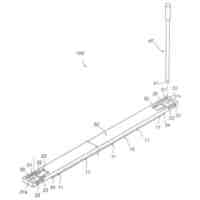
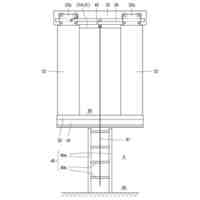
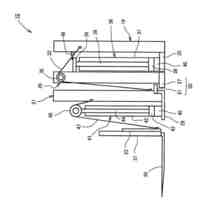
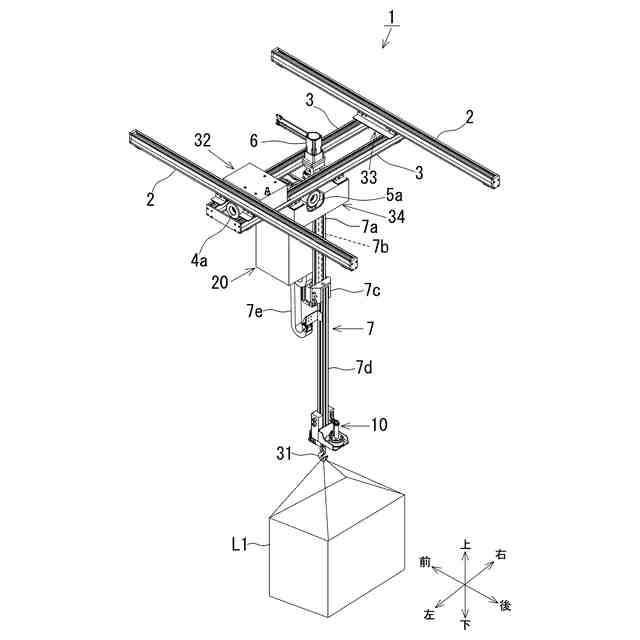
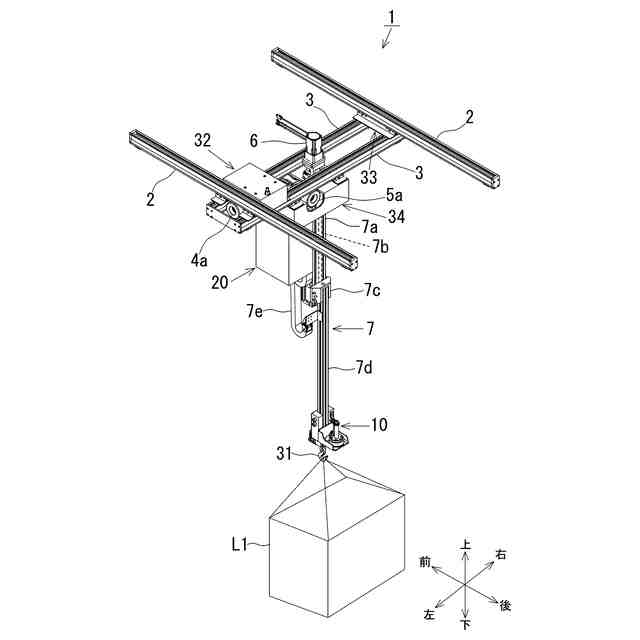
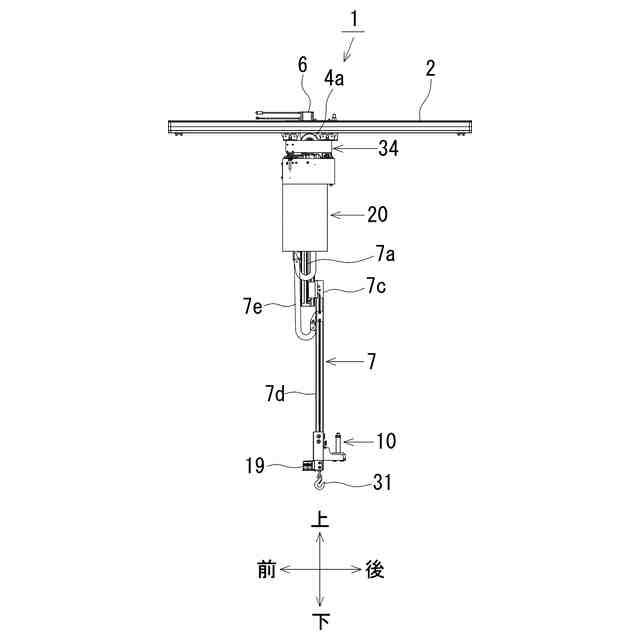
【解決手段】搬送装置1の昇降装置7は、搬送対象物L1の昇降方向に沿って配置されたネジ軸7bと、ネジ軸に螺合されたスライダ7cと、スライダに取付けられた延長部材7dと、延長部材に取付けられたフック31と、ネジ軸を回転させることにより、ネジ軸に沿って延長部材を昇降させるための昇降モータ6と、延長部材7dに設けられた単一の操作レバー10と、操作レバーと一体に設けられた力覚センサ14とを備えている。ワイヤーに吊した搬送対象物L1を巻上機によって昇降させる構成ではないため、搬送途中でブレーキを掛けたり、搬送方向を変えたりしても、搬送対象物L1の揺れが小さい。
【選択図】図1
特許請求の範囲
【請求項1】
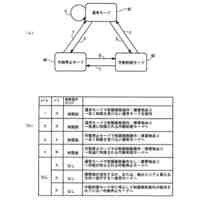
相対向して配置された走行レールと、
前記走行レールと直交するように配置されており、当該走行レールに沿って移動可能な横行レールと、
前記横行レールに沿って移動可能に当該横行レールに設けられており、搬送対象物を昇降させるための昇降装置と、
前記横行レールを前記走行レールに沿って移動させるための走行モータと、
前記昇降装置を前記横行レールに沿って移動させるための横行モータと、
前記走行モータ、前記横行モータおよび前記昇降装置を制御するための制御部と、を備えた搬送装置であって、
前記昇降装置は、
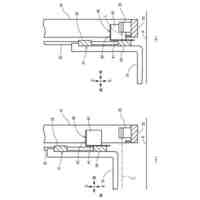
前記搬送対象物の昇降方向に沿って配置されたネジ軸と、
前記ネジ軸に螺合された移動部材と、
前記移動部材に設けられており、前記搬送対象物を保持するための保持部と、
前記ネジ軸を回転させることにより、当該ネジ軸に沿って前記移動部材を昇降させるための昇降モータと、
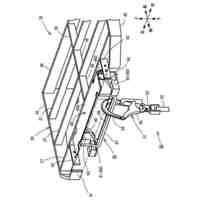
前記移動部材に設けられており、前記搬送対象物の搬送方向を指示するための単一の操作レバーと、
前記操作レバーと一体に設けられており、前記操作レバーの動きに対応した信号を前記制御部へ出力する力覚センサと、を備えており、
前記制御部は、
前記力覚センサから出力される信号に基づいて前記走行モータ、前記横行モータおよび前記昇降装置を制御することを特徴とする搬送装置。
続きを表示(約 1,000 文字)
【請求項2】
前記搬送対象物の搬送方向を含む所定範囲に存在する障害物を検知するセンサを備えており、
前記制御部は、
前記搬送対象物を搬送しているときに前記センサが前記障害物を検知した場合は、前記搬送対象物の前記搬送方向への搬送を禁止し、かつ、前記センサが前記障害物を検知しない搬送方向への搬送を許容することを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記制御部は、
前記力覚センサから取得したデータに基づいて、前記走行モータ、前記横行モータおよび前記昇降モータのうち、駆動すべきモータに与える指令値を求め、かつ、その求めた指令値を平滑化し、その平滑化した指令値に基づいて前記駆動すべきモータを駆動することを特徴とする請求項1または請求項2に記載の搬送装置。
【請求項4】
前記操作レバーは、
押圧操作可能な押圧部と、
前記押圧部の第1のストローク量によって第1のスイッチング信号を出力し、かつ、前記第1のストローク量よりも大きい第2のストローク量によって第2のスイッチング信号を出力する2段スイッチと、を備えており、
前記制御部は、
前記第1のスイッチング信号を入力したときに前記走行モータ、前記横行モータおよび前記昇降モータの少なくとも1つを動作させることが可能な状態になり、前記第2のスイッチング信号を入力したときに前記走行モータ、前記横行モータおよび前記昇降装置の総てを停止させることを特徴とする請求項1または請求項2に記載の搬送装置。
【請求項5】
前記制御部は、
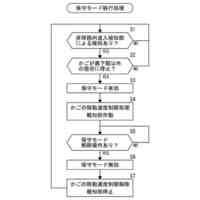
前記搬送対象物を目標位置まで自動搬送するためのプログラムを記憶しており、自動搬送用のスイッチがオンしたときに前記プログラムに従って前記走行モータ、前記横行モータおよび前記昇降装置を制御することにより前記搬送対象物を前記目標位置まで自動搬送し、かつ、その自動搬送中に前記操作レバーが操作されたときに自動搬送を解除することを特徴とする請求項1または請求項2に記載の搬送装置。
【請求項6】
前記操作レバーは、
前記走行レールの走行方向と、前記横行レールの横行方向と、前記移動部材の昇降方向とに対応した方向に動かすことが可能であり、
前記力覚センサは、
6軸力覚センサであることを特徴とする請求項1または請求項2に記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行レールと横行レールと昇降装置とを用いて搬送対象物を搬送するための搬送装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
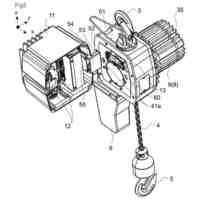
従来、この種の搬送装置として特許文献1に記載のホイストクレーンが知られている。このホイストクレーンは、ホイスト(巻上機)11を備えており、ホイスト11は、搬送対象物を吊すためのフック12を備えたワイヤーロープ13と、ワイヤーロープ13により吊り荷を昇降移動させるための昇降用モータ14とを備えている。また、ホイスト11には、ペンダント型の入力操作部27が吊り下げられている。
【先行技術文献】
【特許文献】
【0003】
特開2013-18619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、前述した従来の搬送装置は、ワイヤーロープの先端のフックに搬送対象物を吊す構成であるため、搬送途中でブレーキを掛けたり、搬送方向を変えたりすると、ワイヤーロープに吊した搬送対象物が、慣性によって振り子のように大きく揺れてしまうので、搬送対象物を目標位置に効率良くかつ精度良く搬送することが難しい。
また、従来の搬送装置の入力操作部は、走行、横行、昇降および停止などの操作を複数の押しボタンによって行うものであるため、搬送方向を変えるたびに、押しボタンを変更しなければならないので、操作が面倒である。さらに、押しボタンを変更するときのタイムラグが大きいため、作業効率が悪い。
さらに、従来の搬送装置は、搬送装置と入力操作部とが通信ケーブルによって接続されており、搬送装置と入力操作部との位置関係が一定しないため、入力操作部を操作する作業者は、搬送装置の動きを目視によって把握することしかできず、体感的に把握することができない。
さらに、従来の搬送装置は、押しボタンのオンおよびオフによって各モータを駆動および停止するため、搬送速度および搬送距離を微調整することが困難だったので、搬送対象物を目標位置に搬送する精度が低かった。
【0005】
そこで、本願発明は、上述した諸問題を解決するために創出されたものであって、搬送対象物を目標位置に効率良くかつ精度良く搬送することができる搬送装置を提供することを目的の1つとする。また、本願発明は、操作が面倒ではなく、作業効率を良くすることができる搬送装置を提供することを目的の1つとする。また、本願発明は、搬送装置の動きを体感的に把握することができる搬送装置を提供することを目的の1つとする。また、本願発明は、搬送対象物を目標位置に搬送する精度を良くすることができる搬送装置を提供することを目的の1つとする。
【課題を解決するための手段】
【0006】
(第1の発明)
上述した目的を達成するため、本願の第1の発明に係る搬送装置(1)は、
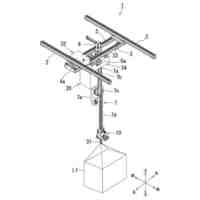
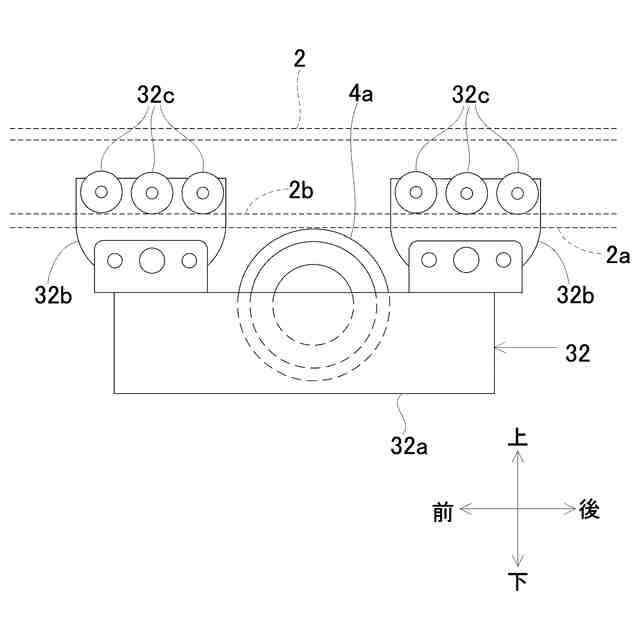
相対向して配置された走行レール(2,2)と、
走行レール(2,2)と直交するように配置されており、当該走行レール(2,2)に沿って移動可能な横行レール(3,3)と、
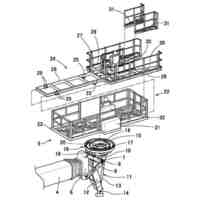
横行レール(3,3)に沿って移動可能に当該横行レール(3,3)に設けられており、搬送対象物(L1:図1)を昇降させるための昇降装置(7)と、
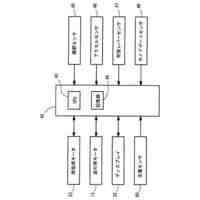
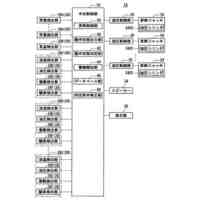
横行レール(3,3)を走行レール(2,2)沿って移動させるための走行モータ(4:図8)と、
昇降装置(7)を横行レール(3,3)に沿って移動させるための横行モータ(5:図8)と、
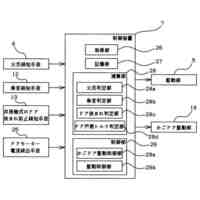
走行モータ(4)、横行モータ(5)および昇降装置(7)を制御するための制御部(20)と、を備えた搬送装置(1)であって、
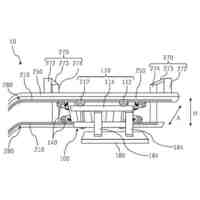
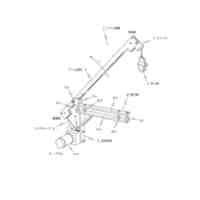
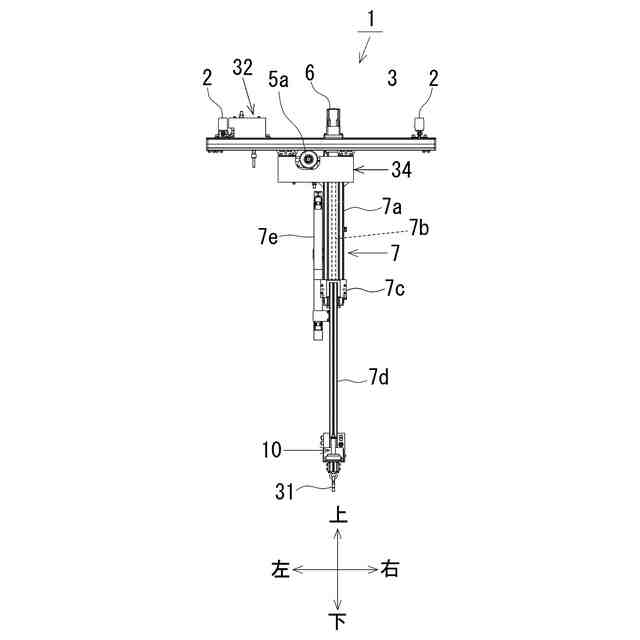
昇降装置(7)は、
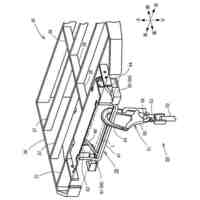
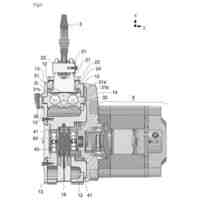
搬送対象物(L1)の昇降方向に沿って配置されたネジ軸(7b:図3)と、
ネジ軸(7b)に螺合された移動部材(7c,7d)と、
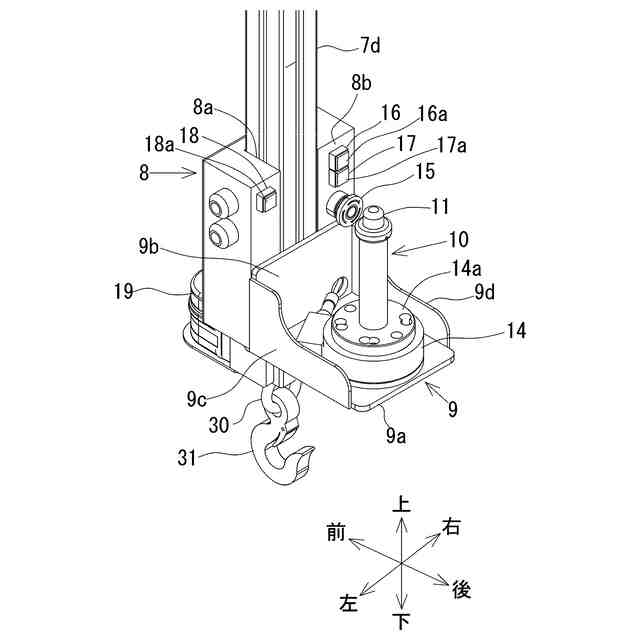
移動部材(7c,7d)に設けられており、搬送対象物(L1:図1)を保持するための保持部(31)と、
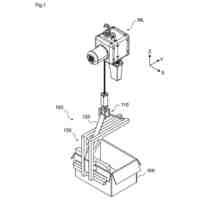
ネジ軸(7b)を回転させることにより、当該ネジ軸(7b)に沿って移動部材(7c,7d)を昇降させるための昇降モータ(6:図1,図8)と、
移動部材(7c,7d)に設けられており、搬送対象物(L1)の搬送方向を指示するための単一の操作レバー(10)と、
操作レバー(10)と一体に設けられており、操作レバー(10)の動きに対応した信号を制御部(20)へ出力する力覚センサ(14:図5,図8)と、を備えており、
制御部(20)は、
力覚センサ(14)から出力される信号に基づいて走行モータ(4)、横行モータ(5)および昇降装置(7)を制御することを特徴とする。
なお、「保持する」とは、一定の状態となるように維持するという意味であり、搬送対象物を係止する態様、支持する態様、挟持する態様、吸引して保持する態様などを含む意味である。
【0007】
本願の第1の発明に係る搬送装置は、昇降装置として巻上機を用いず、搬送対象物の昇降方向に沿って配置されたネジ軸と、ネジ軸に螺合された移動部材と、移動部材に設けられた保持部とを備えており、その保持部に搬送対象物を保持する構成であるため、搬送時における搬送対象物の揺れを小さくすることができる。
したがって、本願の第1の発明によれば、容易に搬送対象物を目標位置に効率良くかつ精度良く搬送することができる。
【0008】
しかも、本願の第1の発明に係る搬送装置は、単一の操作レバーによって搬送方向を指示することができる。
したがって、本願の第1の発明によれば、操作を容易にすることができる。また、搬送方向を変えるときのタイムラグが小さいため、作業効率を良くすることもできる。
【0009】
また、本願の第1の発明に係る搬送装置は、操作レバーが、昇降する移動部材に設けられているため、作業者は操作レバーを操作しながら搬送方向へ移動することになる。
したがって、本願の第1の発明によれば、搬送装置の動きを目視に加えて体感的に把握することもできる。
【0010】
さらに、本願の第1の発明に係る搬送装置は、操作レバーの動きに対応した信号を制御部へ出力する力覚センサが操作レバーと一体に設けられており、制御部は、力覚センサから出力される信号に基づいて走行モータ、横行モータおよび昇降装置を制御することができる。
したがって、本願の第1の発明によれば、搬送速度および搬送距離を微調整することができるので、搬送対象物を目標位置に搬送する精度を良くすることもできる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
搬送装置
12か月前
個人
リフト装置
11か月前
個人
高低間移動補助装置
8か月前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
吊具
2か月前
ユニパルス株式会社
吊具装置
9か月前
個人
吊りバケット装置
4か月前
ユニパルス株式会社
吊具装置
9か月前
株式会社豊田自動織機
荷役車両
4か月前
株式会社豊田自動織機
産業車両
8か月前
株式会社豊田自動織機
荷役車両
22日前
株式会社豊田自動織機
荷役車両
4か月前
株式会社豊田自動織機
荷役車両
8日前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社フジタ
昇降装置
7か月前
ユニパルス株式会社
荷役助力装置
3日前
株式会社北川鉄工所
吊荷制御方法
1か月前
有限会社矢島製作所
ローダ
12か月前
株式会社ノセ技研
バケット
4か月前
ユニパルス株式会社
荷役助力装置
7か月前
株式会社アイセイ
搬送装置
6か月前
ユニパルス株式会社
物品昇降装置
7か月前
有限会社矢島製作所
ローダ
9か月前
ダイコー興産株式会社
引掛具
9か月前
フジテック株式会社
エレベータ
3か月前
大同特殊鋼株式会社
治具
1か月前
フジテック株式会社
エレベータ
2か月前
フジテック株式会社
エレベータ
3か月前
フジテック株式会社
エレベータ
8か月前
フジテック株式会社
エレベータ
12か月前
株式会社豊田自動織機
フォークリフト
6か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
8か月前
フジテック株式会社
乗客コンベア
10か月前
株式会社佐藤組
高所作業テーブル
13か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ