TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024094554
公報種別
公開特許公報(A)
公開日
2024-07-10
出願番号
2022211176
出願日
2022-12-28
発明の名称
走行制御装置
出願人
株式会社SUBARU
代理人
個人
主分類
G08G
1/16 20060101AFI20240703BHJP(信号)
要約
【課題】通信品質が低下している状況下においても、適切な合流制御を実行する。
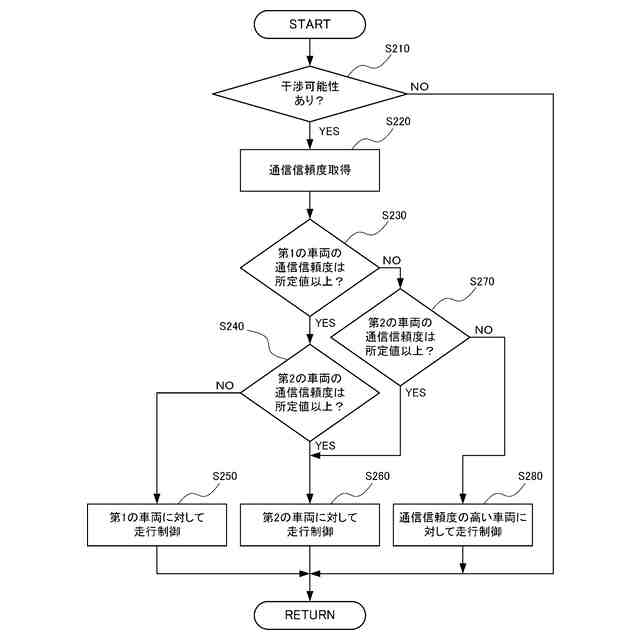
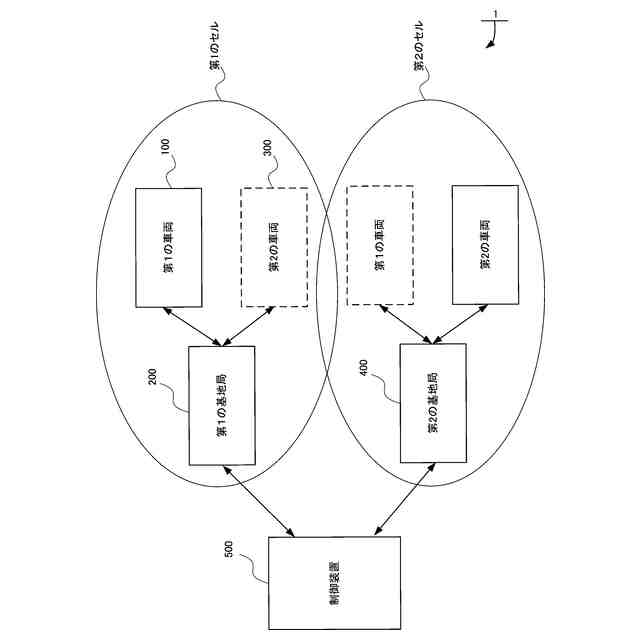
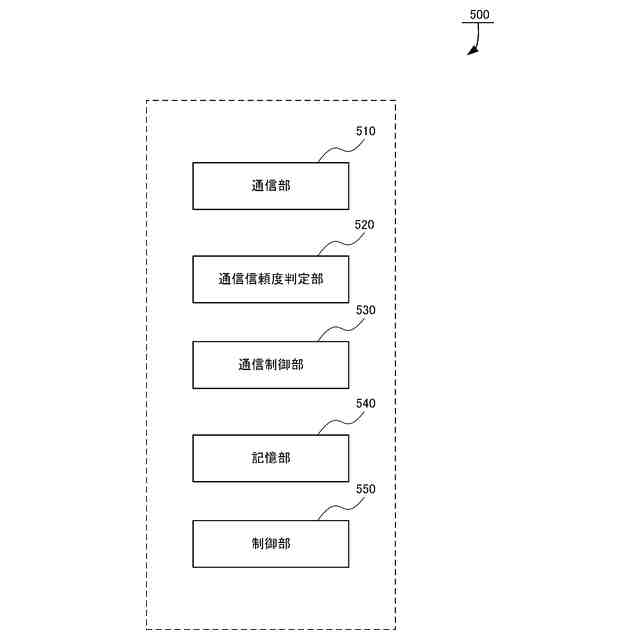
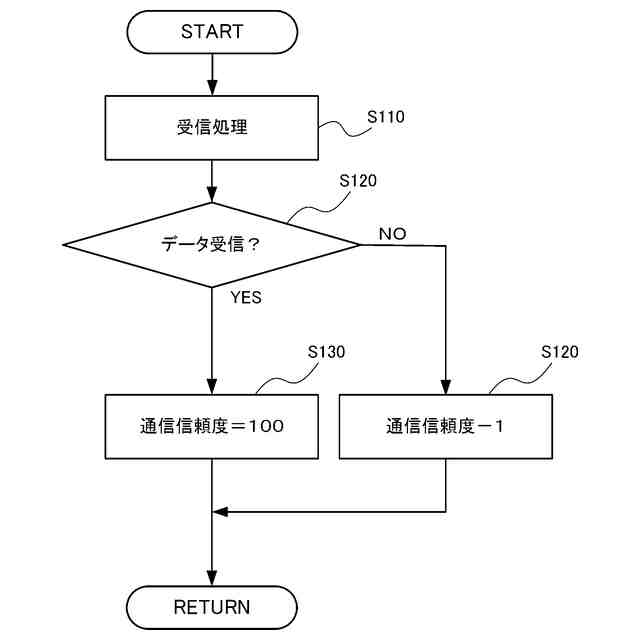
【解決手段】第1の車両100との無線通信の通信信頼度および第2の車両300との無線通信の通信信頼度を判定する通信信頼度判定部520と、第1の車両100の通信信頼度および第2の車両300の通信信頼度が所定の信頼度以上のとき、第2の車両300に対して走行制御を行い、第1の車両100の通信信頼度が所定の信頼度以上であり、かつ、第2の車両300の通信信頼度が所定の信頼度未満のとき、第1の車両100に対して走行制御を行う制御部550と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
第1のレーンと前記第1のレーンよりも走行優先度の低い第2のレーンの合流区間において、前記第1のレーンを走行する第1の車両あるいは前記第2のレーンを走行する第2の車両に対して合流のための走行制御を無線通信によって行う走行制御装置であって、
前記第1の車両との前記無線通信の通信信頼度および前記第2の車両との前記無線通信の通信信頼度を判定する通信信頼度判定部と、
前記第1の車両の前記通信信頼度および前記第2の車両の前記通信信頼度が所定の信頼度以上のとき、前記第2の車両に対して前記走行制御を行い、前記第1の車両の前記通信信頼度が所定の信頼度以上であり、かつ、前記第2の車両の前記通信信頼度が所定の信頼度未満のとき、前記第1の車両に対して前記走行制御を行う制御部と、
を備える走行制御装置。
続きを表示(約 600 文字)
【請求項2】
前記制御部は、前記走行制御として加速抑制制御または減速制御を行う、
請求項1に記載の走行制御装置。
【請求項3】
前記無線通信は複数の基地局を介して行われるものであり、
前記通信信頼度判定部は、前記基地局のハンドオーバに必要な時間を超えて前記無線通信が切断されているとき、前記通信信頼度が所定の信頼度未満であると判定する、
請求項1または2に記載の走行制御装置。
【請求項4】
前記制御部は、前記第1の車両の前記通信信頼度および前記第2の車両の前記通信信頼度が所定の信頼度未満のとき、前記通信信頼度の高い方の車両に対して前記走行制御を行う、
請求項1または2に記載の走行制御装置。
【請求項5】
第1のレーンと前記第1のレーンよりも走行優先度の低い第2のレーンの合流区間において、前記第1のレーンを走行する第1の車両あるいは前記第2のレーンを走行する第2の車両に対して合流のための走行制御を無線通信によって行う走行制御装置であって、
前記第1の車両および前記第2の車両における前記無線通信の通信信頼度を判定する通信信頼度判定部と、
前記第1の車両あるいは前記第2の車両のうち、前記通信信頼度が高い方の車両に対して前記走行制御を行う制御部と、
を備える走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
自動車の分野においても、つながる車、いわゆる、コネクテッドカーに関する開発が急速に進んでいる。
【0003】
また、運転者の負担軽減や安全運転支援を目的とした種々の技術、例えば、車間距離制御システム(Adaptive Cruise Control System:ACCS)や車線維持支援システム(Lane Keeping Assistance System:LKAS)なども実用化されており、上記のコネクテッド技術と融合した高度な運転支援システムや自動運転システムへの期待が高まっている。
【0004】
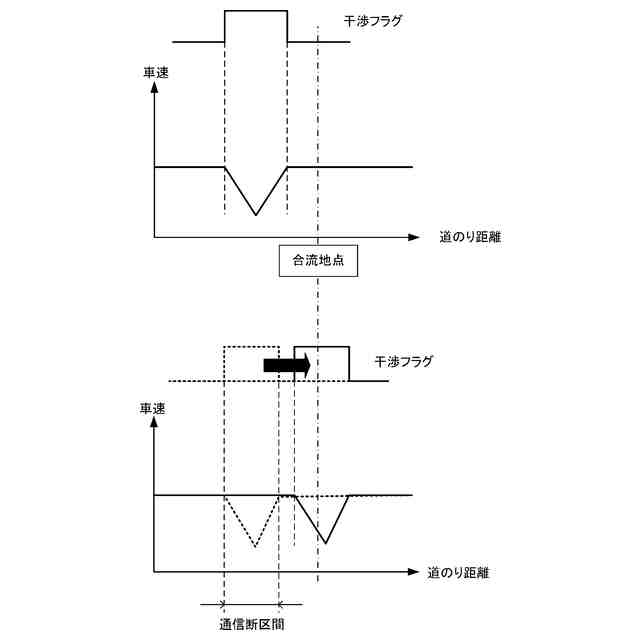
ところで、上記のような走行制御技術と通信技術とを融合させたシステムにおいては、通信障害等によって通信が途絶した場合の対応が問題となる。
例えば、走行車線の合流区間で、一方の車両の通信が途絶した場合、他方の車両の制御を含めて、どのような走行制御を実行すべきなのかが問題となる。
【0005】
上記のような課題に対して、周囲認識機能により隣接車線の所定範囲に他車が認識されない場合に、所定範囲を目標として目標経路を生成し隣接車線への自動車線変更を行う機能、および、通信機能により取得される他車情報を利用して目標経路を生成し加減速制御および操舵制御を行い被合流車線に自動合流する合流支援機能を有する車両の走行制御装置において、自動合流中に通信機能に障害が発生した場合に、加減速制御および操舵制御を停止させる操作介入の判定基準となるオーバーライド閾値を、通信機能の正常時よりも大きい値に変更する技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
特開2020-160885号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の技術は、運転者の操作介入によって手動運転に切替わるオーバーライド機能を備えた車両を前提とし、自動合流中に通信機能に障害が発生した場合に、加減速制御および操舵制御を停止させる操作介入の判定基準となるオーバーライド閾値を、通信機能の正常時よりも大きい値に変更することによって、合流支援中の通信障害発生時における過度の操作介入による車線逸脱や他車両との接近防止を図ることを目的するものであり、そもそも、通信状態が悪い場合においても、運転者が操作介入を行わない運転支援制御あるいは自動運転制御の継続を図るものではない。
【0008】
そこで、本発明は上述の課題に鑑みてなされたものであり、通信品質が低下している状況下においても、適切な走行制御を実行する走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
形態1;本発明の1またはそれ以上の実施形態は、第1のレーンと前記第1のレーンよりも走行優先度の低い第2のレーンの合流区間において、前記第1のレーンを走行する第1の車両あるいは前記第2のレーンを走行する第2の車両に対して合流のための走行制御を無線通信によって行う走行制御装置であって、前記第1の車両との前記無線通信の通信信頼度および前記第2の車両との前記無線通信の通信信頼度を判定する通信信頼度判定部と、前記第1の車両の前記通信信頼度および前記第2の車両の前記通信信頼度が所定の信頼度以上のとき、前記第2の車両に対して前記走行制御を行い、前記第1の車両の前記通信信頼度が所定の信頼度以上であり、かつ、前記第2の車両の前記通信信頼度が所定の信頼度未満のとき、前記第1の車両に対して前記走行制御を行う制御部と、を備える走行制御装置を提案している。
【0010】
形態2;本発明の1またはそれ以上の実施形態は、前記制御部は、前記走行制御として加速抑制制御または減速制御を行う、走行制御装置を提案している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
8日前
個人
火器使用警報装置
2か月前
ニッタン株式会社
煙感知器
1か月前
株式会社サンライン
発炎筒携行容器
6日前
ニッタン株式会社
発信機
2か月前
能美防災株式会社
表示灯カバー
1か月前
アズビル株式会社
測定システム
2か月前
株式会社大林組
誘導装置
3か月前
ニッタン株式会社
煙感知器
3か月前
能美防災株式会社
非常放送システム
1か月前
日本信号株式会社
情報提供システム
2か月前
綜合警備保障株式会社
警備システム
3か月前
株式会社SUBARU
運転支援装置
3か月前
日本無線株式会社
人物探索システム
1か月前
京セラ株式会社
案内システム及び案内方法
1か月前
株式会社CCT
監視装置及び監視方法
3か月前
個人
安全に飛び乗りが可能な低速自動運転車
1か月前
ニッタン株式会社
火災感知端末
3か月前
株式会社F2Fグループ
疲労度判定方法
1か月前
株式会社ユピテル
システムおよびプログラム等
3か月前
シャープ株式会社
表示装置
20日前
トヨタ自動車株式会社
運転支援システム
1か月前
京セラ株式会社
表示システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
日本信号株式会社
遠隔監視システム
2か月前
トヨタ自動車株式会社
照度推定装置
2か月前
戸田建設株式会社
検知システム
6日前
株式会社デンソー
運転支援装置
2か月前
本田技研工業株式会社
データ通信装置
3か月前
トヨタ自動車株式会社
渋滞検知システム
1か月前
トヨタ自動車株式会社
情報提供システム
28日前
トヨタ自動車株式会社
ドライブレコーダ
1か月前
能美防災株式会社
防災設備
2か月前
株式会社創発システム研究所
交通検知システム
1か月前
能美防災株式会社
撮影機能付き発信機
2か月前
株式会社IHI
運転支援装置
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ