TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024088431
公報種別
公開特許公報(A)
公開日
2024-07-02
出願番号
2022203587
出願日
2022-12-20
発明の名称
遠隔操作システム
出願人
住友重機械工業株式会社
代理人
個人
主分類
B25J
3/00 20060101AFI20240625BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】操作者がマスターロボットを操作する際に、大きな力を必要とせず、操作感が阻害されないように操作者に反力を提示することが可能な遠隔操作システムを提供する。
【解決手段】第1ダミー物体がマスターロボットに保持される。スレーブロボットが第1物体を保持し、第1物体を第2物体に接触させて作業を行う。制御装置が、マスターロボットの動作に基づいてスレーブロボットを追従動作させる。スレーブ力検出器が、第1物体が第2物体から受ける反力を検出する。反力発生機構が、第1ダミー物体に力を作用させる。制御装置は、スレーブ力検出器の検出値に基づいて反力発生機構を動作させることにより、スレーブ力検出器で検出された反力の検出値に応じた力を第1ダミー物体に作用させる。
【選択図】図1
特許請求の範囲
【請求項1】
第1ダミー物体が保持されるマスターロボットと、
第1物体を保持し、前記第1物体を第2物体に接触させて作業を行うスレーブロボットと、
前記マスターロボットの動作に基づいて前記スレーブロボットを追従動作させる制御装置と、
前記第1物体が前記第2物体から受ける反力を検出するスレーブ力検出器と、
前記第1ダミー物体に力を作用させる反力発生機構と
を備え、
前記制御装置は、前記スレーブ力検出器の検出値に基づいて前記反力発生機構を動作させることにより、前記スレーブ力検出器で検出された反力の検出値に応じた力を前記第1ダミー物体に作用させる遠隔操作システム。
続きを表示(約 380 文字)
【請求項2】
前記反力発生機構は、前記第1ダミー物体に作用させる力を検出するマスター力検出器を含み、
前記制御装置は、前記マスター力検出器の検出値を、前記スレーブ力検出器で検出された反力の検出値に近づける力フィードバック制御を行う請求項1に記載の遠隔操作システム。
【請求項3】
前記反力発生機構は、さらに、前記第1ダミー物体に接触する第2ダミー物体、及び前記第2ダミー物体の位置を検出する位置検出器を含み、
前記制御装置は、前記位置検出器で検出された位置の検出値を、予め決められた位置指令値に近づける位置フィードバック制御を行う請求項2に記載の遠隔操作システム。
【請求項4】
前記位置フィードバック制御のゲインは、前記力フィードバック制御のゲインより小さい請求項3に記載の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
マスターロボットを操作者が操作し、遠隔にあるスレーブロボットの手先位置及び姿勢がマスターロボットの手先位置及び姿勢に追従するように、スレーブロボットを動作(以下、追従動作という。)させて作業を行う遠隔操作システムが公知である。研削、研磨のような力加減が重要な加工を行う場合は、操作者が押付力を調整しながら作業を行う。このような加工作業を、遠隔操作システムを用いて行う場合は、実際に加工を行っているスレーブロボット側の接触力情報を操作者に提示するために、マスターロボットにアクチュエータが搭載されることが多い。直接作業を行っている場合と同様の力を、操作者が感じられるようにすることにより、ワークと作業環境(ツール)との接触の感覚をつかみやすくなる。
【0003】
ワークと作業環境との接触力が大きくなると、マスターロボット側で発生すべき力が大きくなる。マスターロボット側で大きな力を発生するために、アクチュエータの大出力化や、減速機の付加等が必要になる。アクチュエータの出力を大きくすると、一般的にアクチュエータ自体が大型化することにより、慣性が大きくなる。また、減速機を付加すると、減速機の内部摩擦が発生する。さらに、減速機を介してモータ等のアクチュエータを動かすときに、アクチュエータの慣性を大きく感じることになる。いずれの場合も、操作者がマスターロボットを操作する際に、大きな力が必要になる。
【0004】
マスターロボットのアクチュエータと、操作者が操作するアーム部との間に減速機とクラッチを挿入した遠隔操作システムが公知である(特許文献1)。スレーブロボット側のワークとツールとが接触していないときは、アクチュエータとアーム部とをクラッチで切り離すことにより、アクチュエータの慣性や減速機で発生する摩擦力を操作者に伝えないようにすることができる。スレーブロボット側のワークとツールとが接触しているときはクラッチを繋いでアクチュエータが発生する力を操作者に伝える。これにより、スレーブロボットが作業環境から受ける反力を操作者に提示することができる。
【先行技術文献】
【特許文献】
【0005】
特開平11-333764号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
スレーブロボット側のワークとツールとが振動して接触状態と非接触状態とが頻繁に切り替わる場合や、小さい力を要する作業の場合は、クラッチの接続と切り離しとが頻繁に繰り返される。このため、操作者への反力の提示が断続的に制御される。その結果、操作感が阻害されるとともに、細かい力の制御が困難である。本発明の目的は、操作者がマスターロボットを操作する際に、大きな力を必要とせず、操作感が阻害されないように操作者に反力を提示することが可能な遠隔操作システムを提供することである。
【課題を解決するための手段】
【0007】
本発明の一観点によると、
第1ダミー物体が保持されるマスターロボットと、
第1物体を保持し、前記第1物体を第2物体に接触させて作業を行うスレーブロボットと、
前記マスターロボットの動作に基づいて前記スレーブロボットを追従動作させる制御装置と、
前記第1物体が前記第2物体から受ける反力を検出するスレーブ力検出器と、
前記第1ダミー物体に力を作用させる反力発生機構と
を備え、
前記制御装置は、前記スレーブ力検出器の検出値に基づいて前記反力発生機構を動作させることにより、前記スレーブ力検出器で検出された反力の検出値に応じた力を前記第1ダミー物体に作用させる遠隔操作システムを提供することである。
【発明の効果】
【0008】
反力発生機構が、スレーブ力検出器で検出された反力の検出値に応じた力を第1ダミー物体に作用させるため、マスターロボットにアクチュエータを搭載する必要がない。操作者がマスターロボットを操作する際に、アクチュエータからの慣性力を受けない。このため、マスターロボットの操作に大きな力が必要とされない。また、操作感が阻害されないように、第1ダミー物体に力を作用させることができる。
【図面の簡単な説明】
【0009】
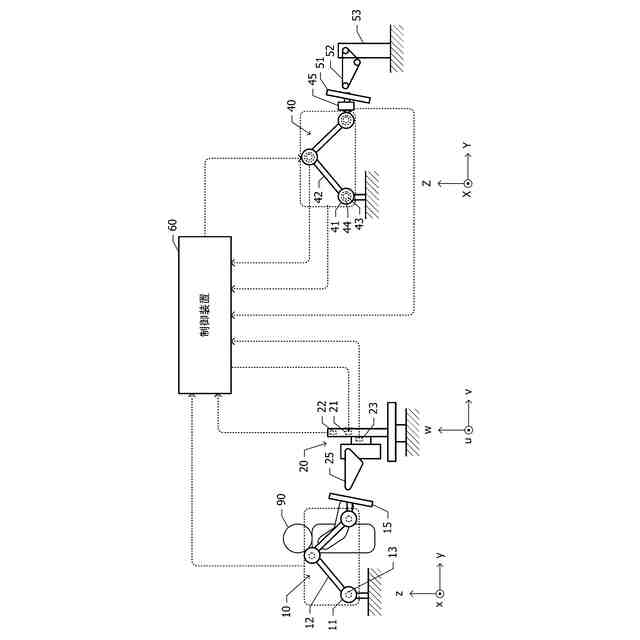
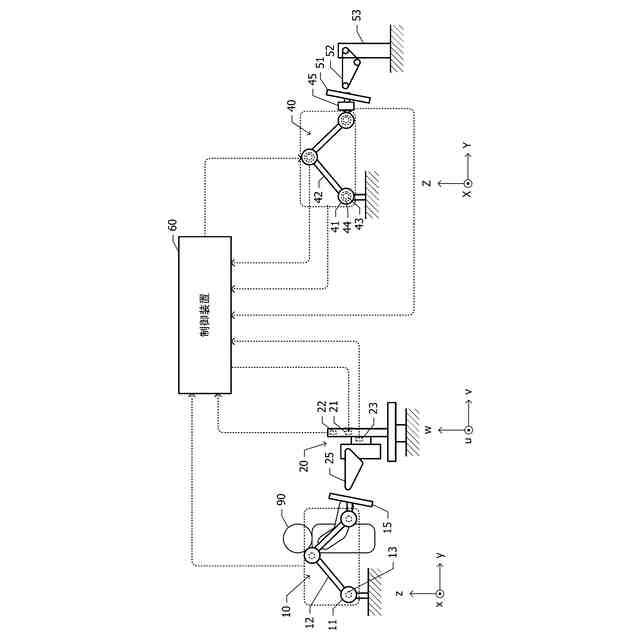
図1は、一実施例による遠隔操作システムの概略図である。
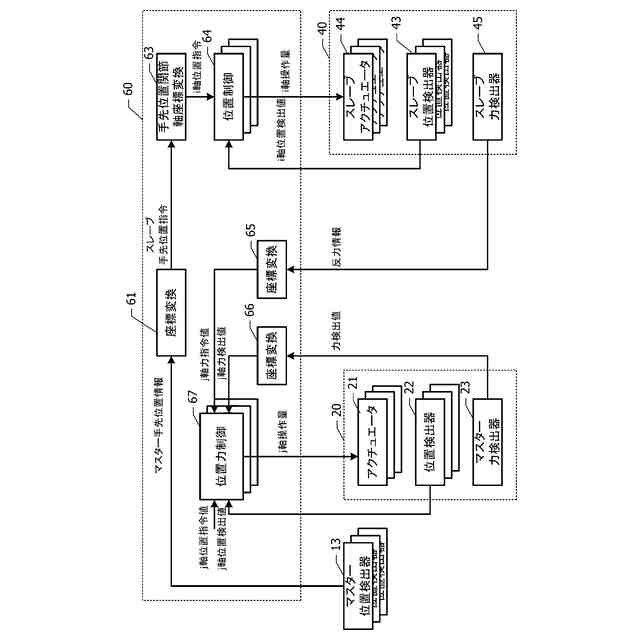
図2は、本実施例による遠隔操作システムのブロック図である。
【発明を実施するための形態】
【0010】
図1及び図2を参照して、一実施例による遠隔操作システムについて説明する。
図1は、本実施例による遠隔操作システムの概略図である。本実施例による遠隔操作システムは、マスターロボット10、反力発生機構20、スレーブロボット40、及び制御装置60を含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
UTM株式会社
搬送装置
7か月前
株式会社ツノダ
挟持工具
3か月前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
個人
ロボットシステム
6か月前
川崎重工業株式会社
罫書用治具
25日前
株式会社マキタ
動力工具
1か月前
トヨタ自動車株式会社
関節機構
6か月前
学校法人立命館
ロボットハンド
4か月前
トヨタ自動車株式会社
関節機構
7か月前
学校法人立命館
グリッパ
3か月前
株式会社不二越
ロボット
6か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
15日前
個人
作業台
7か月前
株式会社ダイヘン
搬送装置
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社不二越
予測システム
4か月前
国立大学法人山形大学
二重関節機構
1か月前
東京都公立大学法人
ロボットハンド
1か月前
CKD株式会社
電動把持装置
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
国立大学法人東北大学
剛性可変連結体
7か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
画像生成装置
3か月前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































