TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024088097
公報種別
公開特許公報(A)
公開日
2024-07-02
出願番号
2022203085
出願日
2022-12-20
発明の名称
ロボットシステム及び制御方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20240625BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークの重量異常を高い信頼性で検出するのに有効なロボットシステムを提供する。
【解決手段】ロボットシステム1は、ワークを保持する保持部3と、保持部3の位置及び姿勢を変更する複数の駆動軸と、を有するロボット2と、複数の駆動軸のうち少なくとも1の駆動軸が発生するトルクを所定値以下に制限しながら、1の駆動軸を所定の動作パターンで動作させる制御部112と、トルクが所定値以下に制限された状態にて、1の駆動軸が動作パターンで動作する期間の長さに基づいてワークの重量異常を検出する検出部114と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
ワークを保持する保持部と、
前記保持部の位置及び姿勢を変更する複数の駆動軸と、
を有するロボットと、
前記複数の駆動軸のうち少なくとも1の駆動軸が発生するトルクを所定値以下に制限しながら、前記1の駆動軸を所定の動作パターンで動作させる制御部と、
前記トルクが前記所定値以下に制限された状態にて、前記1の駆動軸が前記動作パターンで動作する期間の長さに基づいて前記ワークの重量異常を検出する検出部と、
を備えるロボットシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記制御部は、前記ワークの重量異常が生じていない場合であっても、トルクが前記所定値に達する前記動作パターンで前記1の駆動軸を動作させる、
請求項1記載のロボットシステム。
【請求項3】
前記複数の駆動軸は、前記1の駆動軸の位置を変更する他の駆動軸を含み、
前記制御部は、前記他の駆動軸により前記1の駆動軸を定位置に配置した状態にて、前記1の駆動軸を前記動作パターンで動作させる、
請求項1又は2記載のロボットシステム。
【請求項4】
前記制御部は、前記保持部を鉛直な軸線まわりに旋回させる前記動作パターンで前記1の駆動軸を動作させる、
請求項1又は2記載のロボットシステム。
【請求項5】
前記ロボットは、前記保持部に接続されたアームを有し、
前記複数の駆動軸は、
前記保持部の位置及び姿勢を変更するように前記アームを駆動する複数のアーム駆動軸と、
前記アームの先端に対し前記保持部を旋回させる旋回駆動軸と、
を含み、
前記制御部は前記旋回駆動軸を前記1の駆動軸として動作させる、
請求項1又は2記載のロボットシステム。
【請求項6】
前記制御部は、前記複数のアーム駆動軸により前記保持部を前記アームの先端の下に配置した状態にて、前記保持部を鉛直な軸線まわりに旋回させる前記動作パターンで前記旋回駆動軸を動作させる、
請求項5記載のロボットシステム。
【請求項7】
前記1の駆動軸の温度と、前記ワークの重量異常の検出閾値との関係を表す閾値プロファイルと、前記1の駆動軸の温度とに基づいて前記検出閾値を決定する閾値決定部を更に備え、
前記検出部は、決定された前記検出閾値と、前記1の駆動軸が前記動作パターンで動作する期間の長さとの関係に基づいて前記ワークの重量異常を検出する、
請求項1又は2記載のロボットシステム。
【請求項8】
前記1の駆動軸の温度と、前記1の駆動軸が前記動作パターンで動作した期間の長さと、前記ワークの重量異常の有無とを対応付けたレコードを記憶部に蓄積する蓄積部と、
前記記憶部に蓄積された複数の前記レコードに基づいて、前記ワークの重量異常が有るレコードと、前記ワークの重量異常が無いレコードとを分類するように前記閾値プロファイルを生成するプロファイル生成部と、を更に備え、
前記閾値決定部は生成された前記閾値プロファイルと前記1の駆動軸の温度とに基づいて前記検出閾値を決定する、
請求項7記載のロボットシステム。
【請求項9】
前記蓄積部は、前記閾値プロファイルが生成された後に、前記1の駆動軸の温度と、前記1の駆動軸が前記動作パターンで動作した期間の長さと、前記検出部による検出結果とを対応付けた追加レコードを前記記憶部に蓄積し、
前記プロファイル生成部は、前記追加レコードに基づいて前記閾値プロファイルを更新する、
請求項8記載のロボットシステム。
【請求項10】
ワークを保持する保持部と、
前記保持部の位置及び姿勢を変更する複数の駆動軸と、
を有するロボットと、
前記複数の駆動軸のうち少なくとも1の駆動軸を、所定長の期間をかけて所定の動作パターンで動作させる制御部と、
前記動作パターンでの動作にかかる期間が前記所定長となるように前記1の駆動軸が発生させたトルクの大きさに基づいて前記ワークの重量異常を検出する検出部と、
を備えるロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム及び制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、ハンド装置と、ハンド装置を搭載した可動部と、可動部を動作させるための駆動軸と、駆動軸を駆動するモータの電流値を計測する電流計測部と、ハンド装置がワークを保持しているときに電流計測部が計測した電流値と所定の閾値との比較結果に基づいて、ハンド装置が保持するワークの数が所期の数と異なることを検知するワーク数検知部と、を備えるワーク搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-3770号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、ワークの重量異常を高い信頼性で検出するのに有効なロボットシステムを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットシステムは、ワークを保持する保持部と、保持部の位置及び姿勢を変更する複数の駆動軸と、を有するロボットと、複数の駆動軸のうち少なくとも1の駆動軸が発生するトルクを所定値以下に制限しながら、1の駆動軸を所定の動作パターンで動作させる制御部と、トルクが所定値以下に制限された状態にて、1の駆動軸が動作パターンで動作する期間の長さに基づいてワークの重量異常を検出する検出部と、を備える。
【0006】
本開示の他の側面に係るロボットシステムは、ワークを保持する保持部と、保持部の位置及び姿勢を変更する複数の駆動軸と、を有するロボットと、複数の駆動軸のうち少なくとも1の駆動軸を、所定長の期間をかけて所定の動作パターンで動作させる制御部と、動作パターンでの動作にかかる期間が所定長となるように1の駆動軸が発生させたトルクの大きさに基づいてワークの重量異常を検出する検出部と、を備える。
【0007】
本開示の更に他の側面に係る制御方法は、ワークをロボットの保持部により保持させることと、保持部の位置及び姿勢を変更するロボットの複数の駆動軸のうち、少なくとも1の駆動軸が発生するトルクを所定値以下に制限しながら、1の駆動軸を所定の動作パーンで動作させることと、トルクが所定値以下に制限された状態にて、1の駆動軸が所定の動作パターンで動作する期間の長さに基づいてワークの重量異常を検出することと、を含む。
【0008】
本開示の更に他の側面に係る制御方法は、ワークをロボットの保持部により保持させることと、保持部の位置及び姿勢を変更するロボットの複数の駆動軸のうち、少なくとも1の駆動軸を、所定長の期間をかけて所定の動作パターンで動作させることと、動作パターンでの動作にかかる期間が所定長となるように1の駆動軸が発生させたトルクの大きさに基づいてワークの重量異常を検出することと、を含む。
【発明の効果】
【0009】
本開示によれば、ワークの重量異常を高い信頼性で検出するのに有効なロボットシステムを提供することができる。
【図面の簡単な説明】
【0010】
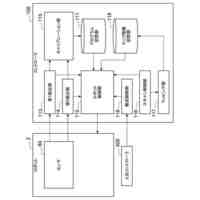
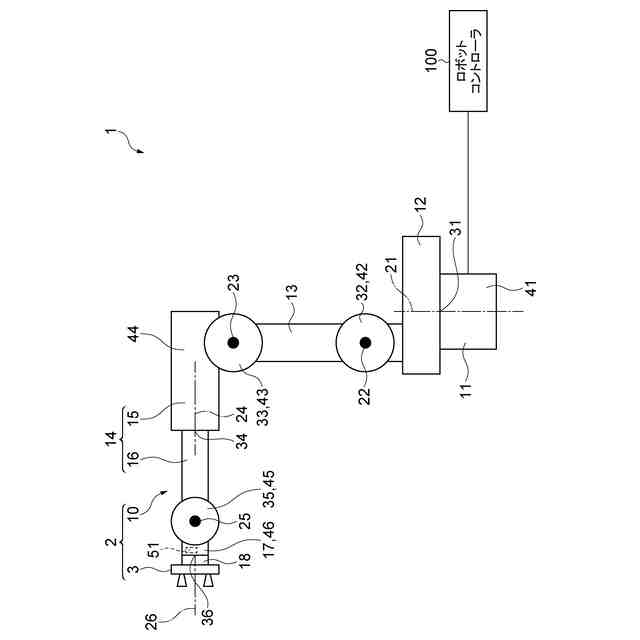
ロボットシステムの構成を例示する模式図である。
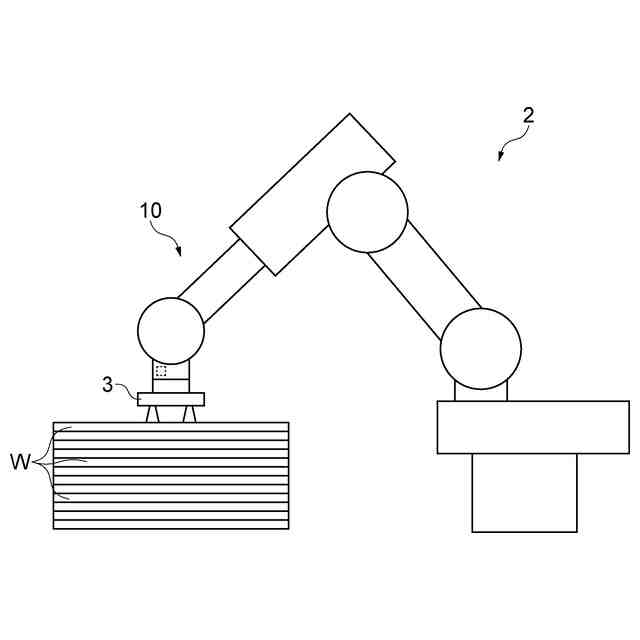
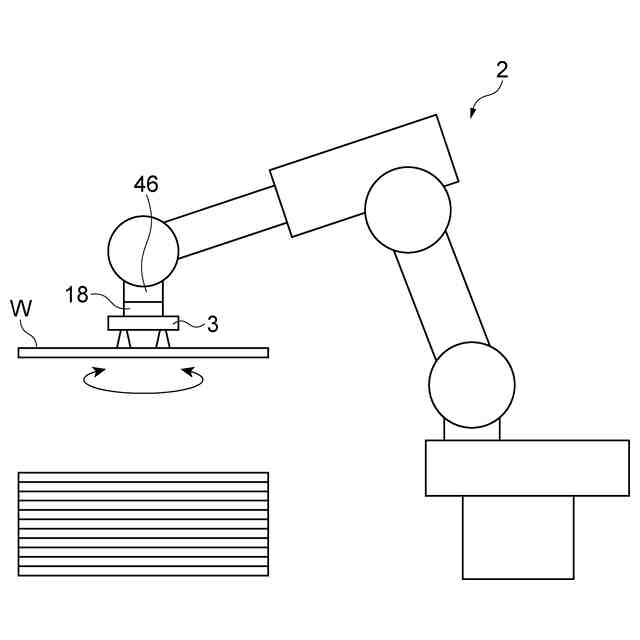
ピックアップのためにロボットがワークを保持した状態を例示する模式図である。
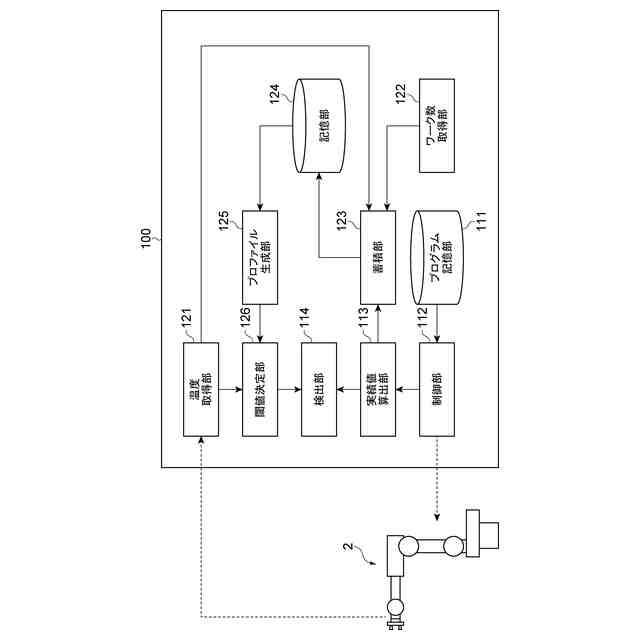
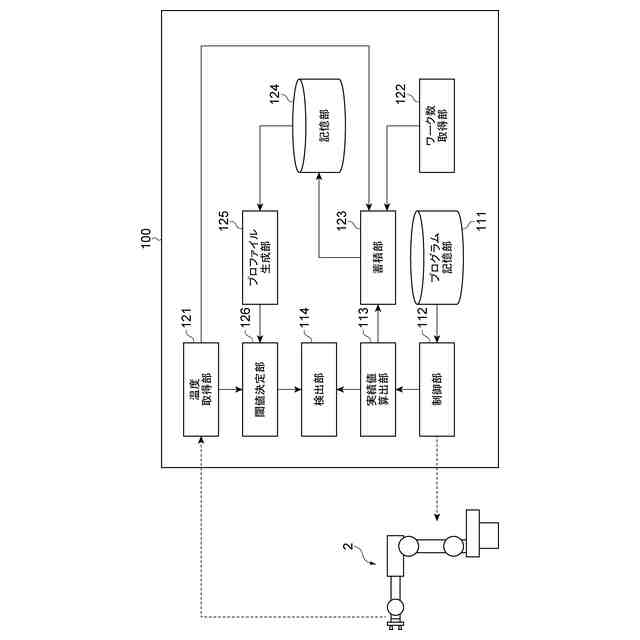
コントローラの機能的な構成を例示するブロック図である。
ロボットが検査モーションを実行している状態を例示する模式図である。
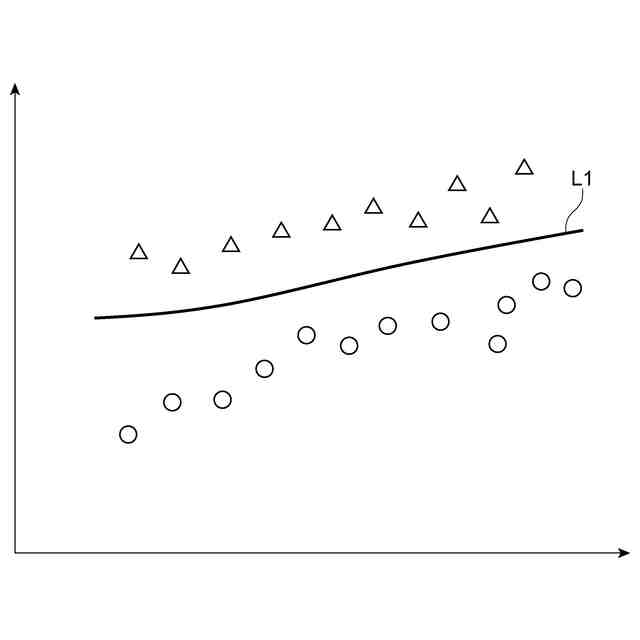
閾値プロファイルを例示するグラフである。
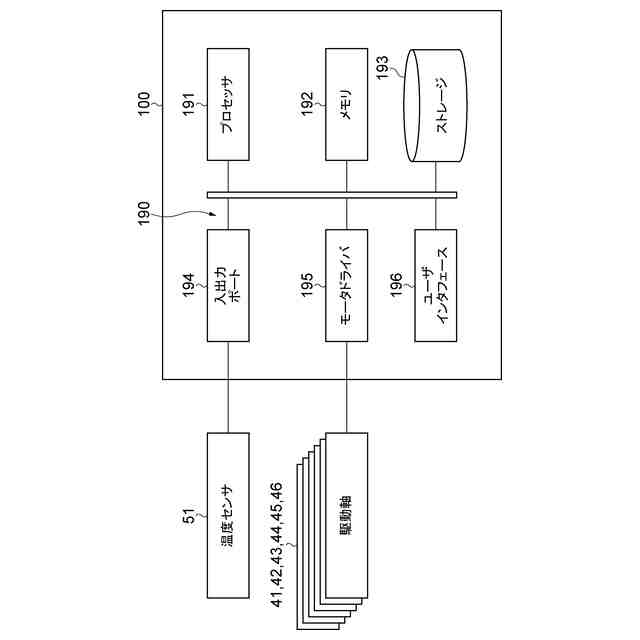
コントローラのハードウェア構成を例示するブロック図である。
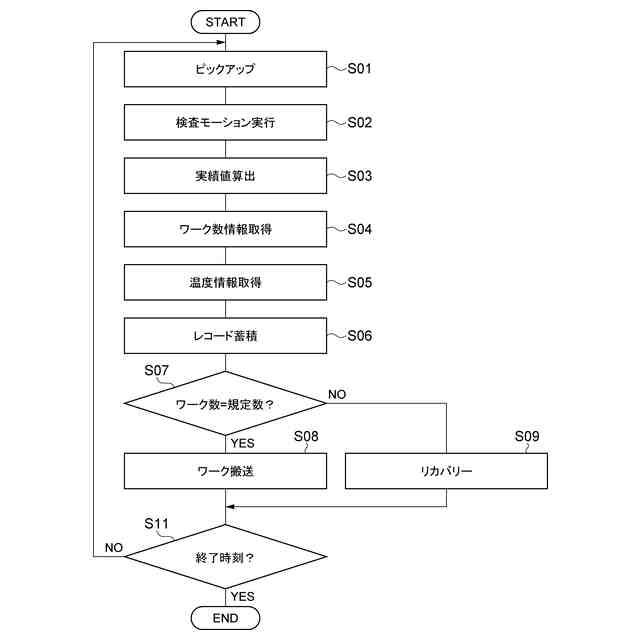
レコードの蓄積中におけるワーク搬送手順を例示するフローチャートである。
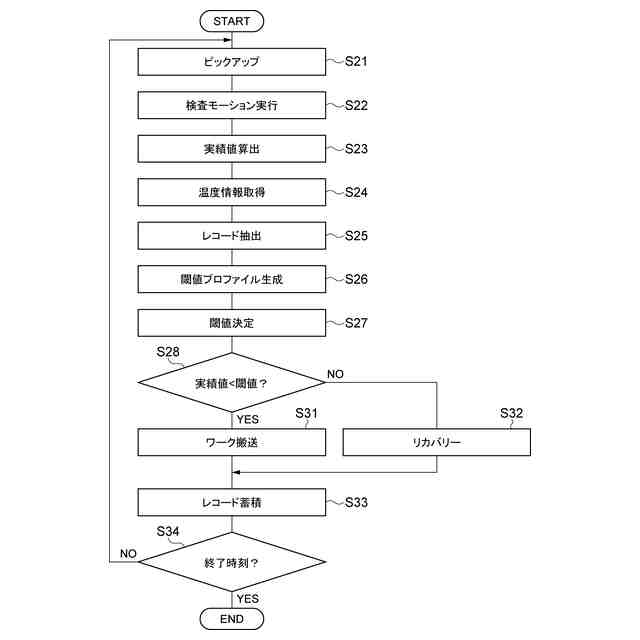
レコードの蓄積後におけるワーク搬送手順を例示するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボットシステム、キャリブレーションツール、及びキャリブレーション方法
1か月前
個人
木製ハンマー
1か月前
個人
関節モジュール
1か月前
個人
寸切りボルト回し
26日前
個人
スロットルトリガー
1か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
4か月前
コクヨ株式会社
補助器具
20日前
株式会社ツノダ
挟持工具
6か月前
太陽工業株式会社
チャック装置
13日前
株式会社ツノダ
挟持工具
7か月前
株式会社右川ゴム製造所
把持装置
6か月前
日東工器株式会社
衝撃工具
3か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
学校法人立命館
グリッパ
1か月前
CKD株式会社
把持装置
1か月前
オムロン株式会社
電動把持工具
19日前
学校法人立命館
ロボットハンド
7か月前
トヨタ自動車株式会社
ロボット
1か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
6か月前
株式会社マキタ
動力工具
4か月前
川崎重工業株式会社
罫書用治具
3か月前
個人
回転工具およびバリ取り部品
1か月前
白山工業株式会社
ロボットアーム
1か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
トヨタ自動車株式会社
ハンド構造
3か月前
株式会社ダイヘン
搬送装置
4か月前
株式会社ハーモ
開閉チャック装置
2か月前
個人
プーリーキー抜き治具
6か月前
株式会社ダイヘン
搬送装置
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ

































