TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086474
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201618
出願日
2022-12-16
発明の名称
ワーク運搬システム
出願人
株式会社イノアックコーポレーション
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20240620BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来のワーク運搬システムでは、刺し棒の突き刺し方向でワークの位置がばらつくと、対応が困難であった。
【解決手段】本開示のワーク運搬システムは、ワークに刺し棒を突き刺すことで前記ワークを保持するワーク保持部を移動して、前記ワークを運搬するワーク運搬システムであって、前記ワーク保持部に設けられ、前記刺し棒から先方に離れた第1位置よりワークが前記ワーク保持部に対して相対的に接近したことを感知する第1センサと、前記第1センサが感知したことを条件にして、前記刺し棒の前記ワークに対する突き刺し動作を許可する動作制御部と、備えるワーク運搬システムである。
【選択図】図14
特許請求の範囲
【請求項1】
ワークに刺し棒を突き刺すことで前記ワークを保持するワーク保持部を移動して、前記ワークを運搬するワーク運搬システムであって、
前記ワーク保持部に設けられ、前記刺し棒から先方に離れた第1位置よりワークが前記ワーク保持部に対して相対的に接近したことを感知する第1センサと、
前記第1センサが感知したことを条件にして、前記刺し棒の前記ワークに対する突き刺し動作を許可する動作制御部と、備えるワーク運搬システム。
続きを表示(約 860 文字)
【請求項2】
前記ワーク保持部に設けられ、前記刺し棒の先端から基端側に離れた第2位置より前記ワークが前記ワーク保持部に対して相対的に接近したことを感知する第2センサを備え、
前記動作制御部は、前記第1センサの感知後に前記第2センサが感知したことを条件にして、前記ワークに対する運搬動作を許可する請求項1に記載のワーク運搬システム。
【請求項3】
前記刺し棒は、1対設けられ、
前記第2センサは、前記1対の刺し棒の間に配置されている請求項2に記載のワーク運搬システム。
【請求項4】
前記第1センサは、前記刺し棒を間に挟んで1対設けられ、
前記動作制御部は、前記突き刺し動作を、少なくとも一方の前記第1センサが感知したことを条件にして行う請求項1又は3に記載のワーク運搬システム。
【請求項5】
前記動作制御部は、前記刺し棒を予め設定された規定距離だけ進出させて前記突き刺し動作を実行し、前記第2センサが感知しない場合には、予め設定された基準高さ以上まで前記刺し棒を戻し、再度、前記突き刺し動作を行う請求項2に記載のワーク運搬システム。
【請求項6】
前記ワーク保持部に設けられ、前記刺し棒の先端の位置に前記ワークが前記ワーク保持部に対して相対的に接近したことを感知する第3センサを備え、
前記動作制御部は、前記第3センサ、前記第2センサの順番でそれらが感知したことを条件にして、前記運搬動作を許可する請求項2又は3に記載のワーク運搬システム。
【請求項7】
検出軸上の異なる2箇所に感知点を有し、第1の感知点より前記ワークが前記ワーク保持部に対して相対的に接近すると第1作動状態になると共に、第2の感知点より前記ワークが前記ワーク保持部に対して相対的に接近すると第2作動状態になる複合センサが、前記第3センサと、前記第1センサ又は前記第2センサとに、兼用されている請求項6に記載のワーク運搬システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ワーク運搬システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来のワーク運搬システムとして、ワークに刺し棒を突き刺すことでワークを保持して、ワークを運搬するものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
実開昭62-74989(第2頁の第13~19行目等)
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のワーク運搬システムでは、刺し棒の突き刺し方向でワークの位置がばらつくと、対応が困難であった。
【課題を解決するための手段】
【0005】
発明の第1態様は、ワークに刺し棒を突き刺すことで前記ワークを保持するワーク保持部を移動して、前記ワークを運搬するワーク運搬システムであって、前記ワーク保持部に設けられ、前記刺し棒から先方に離れた第1位置よりワークが前記ワーク保持部に対して相対的に接近したことを感知する第1センサと、前記第1センサが感知したことを条件にして、前記刺し棒の前記ワークに対する突き刺し動作を許可する動作制御部と、備えるワーク運搬システムである。
【図面の簡単な説明】
【0006】
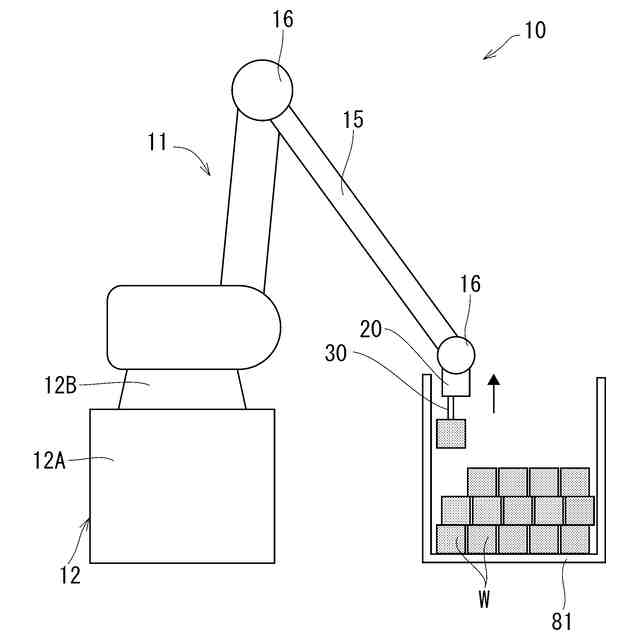
第1実施形態のワーク運搬システムの側面図
ワークに刺し棒を突き刺したときのワーク運搬システムの側面図
ワークを持ち上げているワーク運搬システムの側面図
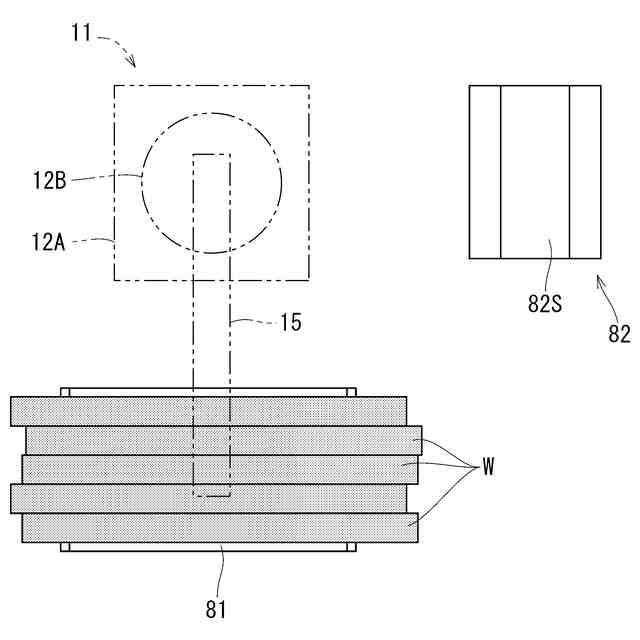
ワークに刺し棒を突き刺すときのワーク運搬システムの平面図
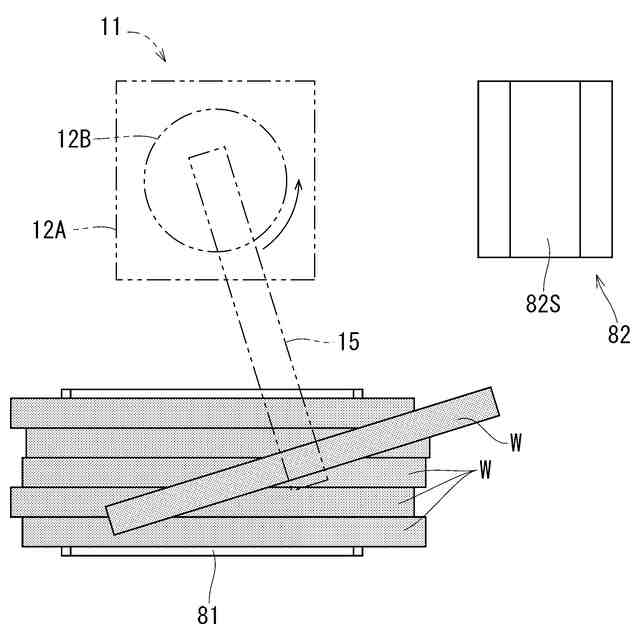
ワークを持ち上げて上側回転部を回転し始めたときのワーク運搬システムの平面図
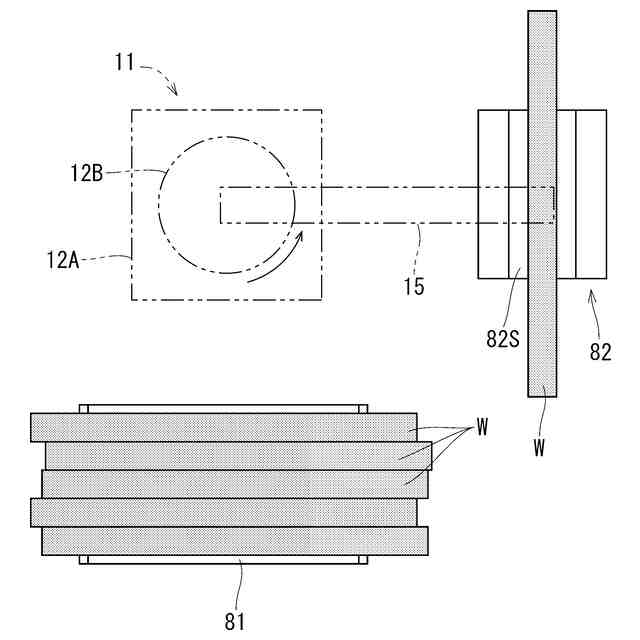
ワークをコンベア上に持ち運んだときのワーク運搬システムの平面図
ワークをコンベア上に持ち運んだときのワーク運搬システムの側面図
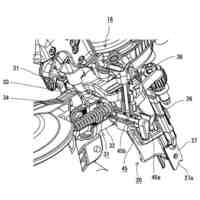
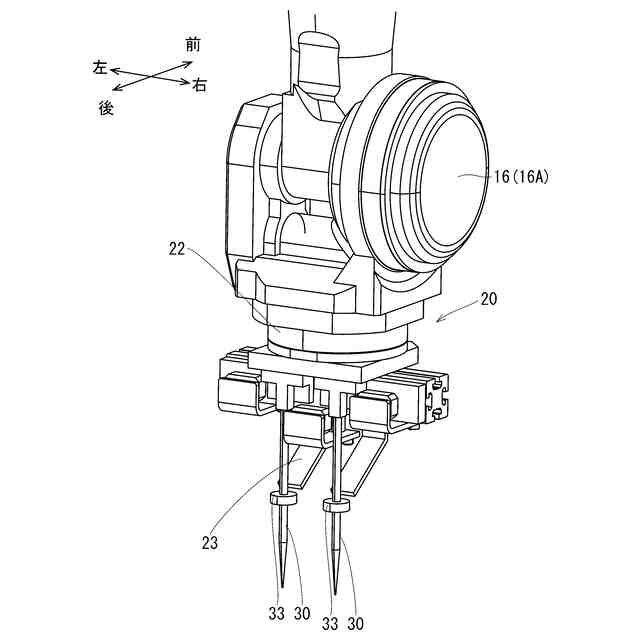
ワーク保持部の後方斜視図
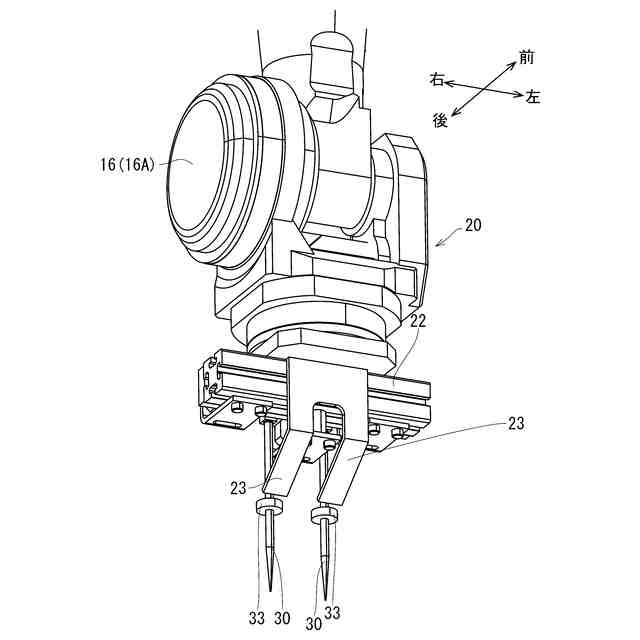
ワーク保持部の前方斜視図
ワーク保持部の後面図
ワークに刺し棒を突き刺したときのワーク保持部の後方斜視図
ワーク運搬システムの電気的な構成を示すブロック図
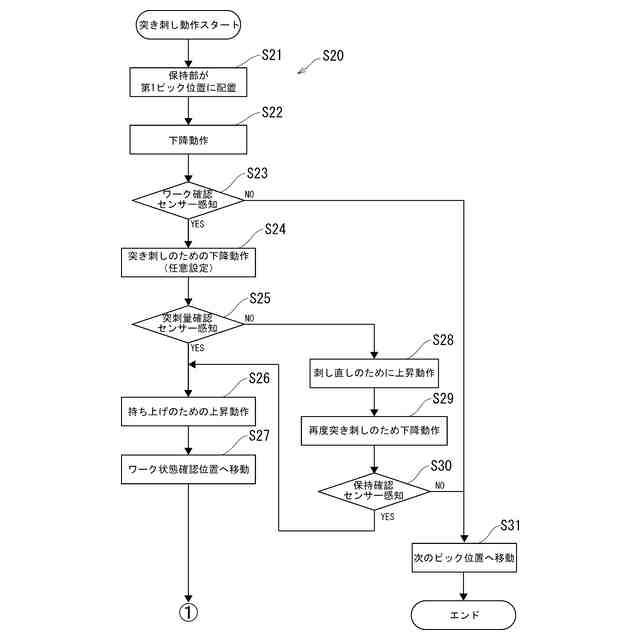
サーチ処理のフローチャート
突き刺し運搬処理のフローチャート
突き刺し運搬処理のフローチャート
1対の刺し棒の間にワーク対向部を受容させたときのワーク運搬システムの側面図
ワーク対向部をワークに宛がって刺し棒をワークから引き抜くときのワーク運搬システムの側面図
刺し棒をワークから引き抜いたときのワーク運搬システムの側面図
ワーク保持部を次のピック位置に配置したときのワーク運搬システムの側面図
【発明を実施するための形態】
【0007】
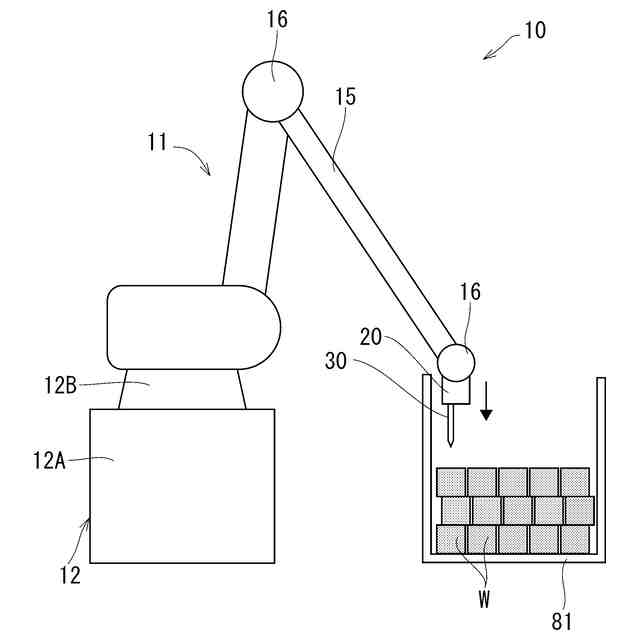
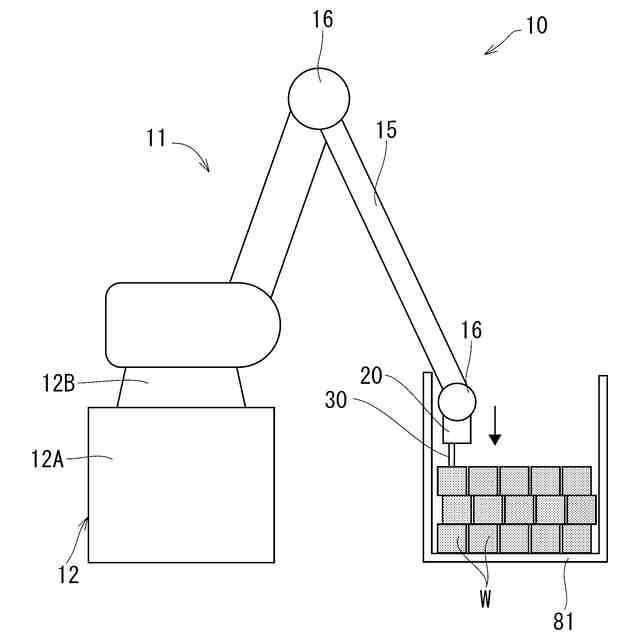
[第1実施形態]
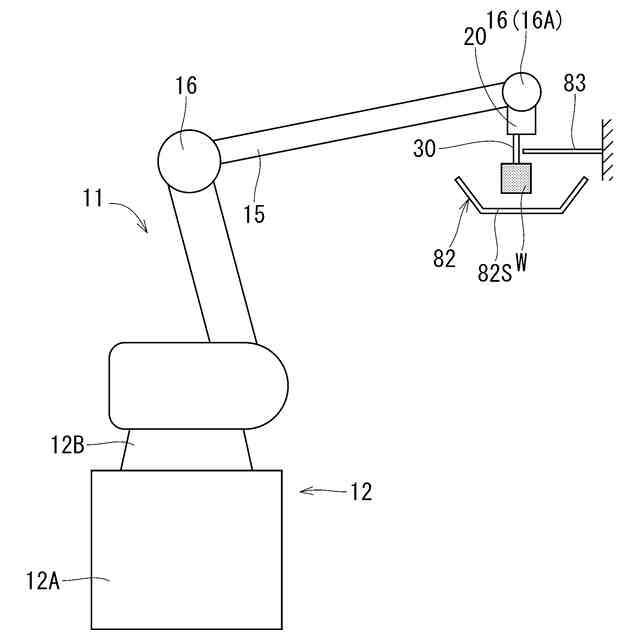
図1及び図2に示すように、本開示の第1実施形態に係るワーク運搬システム10は、ワークWに刺し棒30を突き刺すことでワークWを保持して、ワークWを運搬する。本実施形態の例では、ワーク運搬システム10には、ワーク運搬機11が設けられ、ワーク運搬機11が、刺し棒30を備えて、ワークWの一時置き場であるワーク載置ラック81(図3、図4参照)から、ワーク回収部82へと運搬するように制御される(図6、図7参照)。
【0008】
ワーク運搬機11は、ロボットアーム15と、それを支持するアーム支持部12とを備えたロボットである。ロボットアーム15は、複数の関節部16(図1の例では、2つ)を備えると共に、刺し棒30を支持してワークWを保持するワーク保持部20を先端部に備え、ワーク保持部20を移動させる。
【0009】
アーム支持部12は、床に固定される下側固定部12Aと、それに搭載された上側回転部12Bと、を備えている(図2参照)。上側回転部12Bは、下側固定部12Aに鉛直軸回りに回転可能に支持されている(図3、図4参照)。そして、上側回転部12Bにロボットアーム15が支持されている。これにより、ロボットアーム15を鉛直軸回りに旋回可能になっていて、ワーク運搬機11は、ワーク運搬機11の前側に設けられるワーク載置ラック81(図3参照)から、ワーク運搬機11の側方に設けられるワーク回収部82の載置ステージ82S(図5、図6参照)へと、ワークWを移動可能になっている。なお、本実施形態の例では、ワーク回収部82は、コンベアを備え、載置ステージ82Sは、コンベアの一部が一段上にシフトした部分になっていて、ワークWが載置されると、一段下がってコンベアによりワークWが搬送される。
【0010】
なお、例えば、ワークWは、粉砕機で粉砕されて再利用されるものであってもよく(例えば発泡体等)、例えば、ワーク回収部82のコンペアにより粉砕機へと搬送される。本実施形態の例では、ワークWは、シート状に成形された成形品のうちトリミングされた端辺部(例えば4辺部)であり、例えば、略角棒状をなしている(図1、図3参照)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
UTM株式会社
搬送装置
7か月前
個人
ペットボトル用蓋開け具。
8か月前
株式会社ツノダ
挟持工具
3か月前
株式会社ツノダ
挟持工具
4か月前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
個人
ロボットシステム
6か月前
学校法人立命館
ロボットハンド
4か月前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
3か月前
株式会社不二越
ロボット
8か月前
トヨタ自動車株式会社
関節機構
6か月前
トヨタ自動車株式会社
関節機構
7か月前
川崎重工業株式会社
罫書用治具
25日前
個人
作業台
7か月前
トヨタ自動車株式会社
ハンド構造
15日前
オムロン株式会社
ロボットハンド
8か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
CKD株式会社
電動把持装置
2か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
国立大学法人山形大学
二重関節機構
1か月前
株式会社不二越
予測システム
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社越智工業所
ブレーカ用カバー
6か月前
株式会社共和製作所
ロボット用アーム
2か月前
工機ホールディングス株式会社
作業機
5か月前
マックス株式会社
打ち込み工具
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ