TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024078706
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022191201
出願日
2022-11-30
発明の名称
ロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20240604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者による作業速度が変化しても、後工程に送り出される対象物の滞留や不足を抑制し得るロボットシステムを実現すること。
【解決手段】対象物に対して作業を行うロボットシステムであって、前記対象物を順次搬送する第1搬送部と、前記第1搬送部で搬送される前記対象物に作業を行うロボットと、作業者が作業を行うための前記対象物を順次搬送する第2搬送部と、前記ロボットが単位時間当たりに作業を行う前記対象物の数が、前記作業者が単位時間当たりに作業を行う前記対象物の数に応じて変化するように、前記ロボットの動作を制御するロボット制御部と、を備えることを特徴とするロボットシステム。
【選択図】図1
特許請求の範囲
【請求項1】
対象物に対して作業を行うロボットシステムであって、
前記対象物を順次搬送する第1搬送部と、
前記第1搬送部で搬送される前記対象物に作業を行うロボットと、
作業者が作業を行うための前記対象物を順次搬送する第2搬送部と、
前記ロボットが単位時間当たりに作業を行う前記対象物の数が、前記作業者が単位時間当たりに作業を行う前記対象物の数に応じて変化するように、前記ロボットの動作を制御するロボット制御部と、
を備えることを特徴とするロボットシステム。
続きを表示(約 590 文字)
【請求項2】
前記ロボット制御部は、前記作業者が単位時間当たりに作業を行う前記対象物の数が減少したとき、前記ロボットが単位時間当たりに作業を行う前記対象物の数が増加するように、前記ロボットの動作を制御する請求項1に記載のロボットシステム。
【請求項3】
前記第1搬送部および前記第2搬送部は、互いに並行して前記対象物を搬送する請求項1または2に記載のロボットシステム。
【請求項4】
前記第1搬送部および前記第2搬送部は、互いに直列につながっている請求項1または2に記載のロボットシステム。
【請求項5】
前記作業者が単位時間当たりに作業を行った前記対象物の数を検出する作業数検出部を備え、
前記作業数検出部は、検出結果を前記ロボット制御部に出力する請求項1または2に記載のロボットシステム。
【請求項6】
前記作業数検出部は、前記作業者が行う作業の成否を検出する機能、および、前記成否の検出結果を前記ロボット制御部に出力する機能を有する請求項5に記載のロボットシステム。
【請求項7】
前記対象物は、食品容器を構成する容器本体および蓋体であり、
前記ロボットが前記対象物に行う作業は、前記容器本体に対して前記蓋体を閉める作業である請求項1または2に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、各種の生産現場においてロボットの導入が検討されているが、その一例として、食品等を包装したり、容器に入れて蓋を閉めたりする、食品用システムが用いられている。
【0003】
例えば、特許文献1には、積層食品を袋詰めにするシステムが開示されている。積層食品とは、例えば、サンドイッチのような食材を積層してなる食品である。このシステムでは、前工程から第1搬送ラインで搬送される積層食品について、ロボットで把持して姿勢を変更した後、袋詰めを行う。また、このシステムでは、ロボットによる袋詰め等の処理の能力が足りない場合には、袋詰めを行わずにそのまま積層食品を第1搬送ラインで下流側に搬送し、袋詰めした積層食品は、第2搬送ラインで下流側に搬送する。第1搬送ラインで搬送された、袋詰めされていない積層食品は、ロボットの下流側に位置する作業者が手作業で袋詰めすることが想定されている。これにより、ライン全体が停止することを回避することができる。袋詰めされた積層食品は、後工程の袋閉じ機に送り出される。
【先行技術文献】
【特許文献】
【0004】
特開2021-187496号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のシステムでは、ロボットによる袋詰めの処理速度が一定であるため、作業者による袋詰めの処理速度が変化した場合、システム全体での処理速度も変化するため、後工程に送り出される積層食品の数が変化する。そうすると、後工程での処理能力を超える数の積層食品が送り出されたり、後工程に送り出される食品の数が不足して処理能力を余らせたりすることが懸念される。そこで、後工程に送り出される食品等の滞留を抑制し、かつ、後工程の処理効率の低下を抑制可能なシステムの実現が課題となっている。
【課題を解決するための手段】
【0006】
本発明の適用例に係るロボットシステムは、
対象物に対して作業を行うロボットシステムであって、
前記対象物を順次搬送する第1搬送部と、
前記第1搬送部で搬送される前記対象物に作業を行うロボットと、
作業者が作業を行うための前記対象物を順次搬送する第2搬送部と、
前記ロボットが単位時間当たりに作業を行う前記対象物の数が、前記作業者が単位時間当たりに作業を行う前記対象物の数に応じて変化するように、前記ロボットの動作を制御するロボット制御部と、
を備える。
【図面の簡単な説明】
【0007】
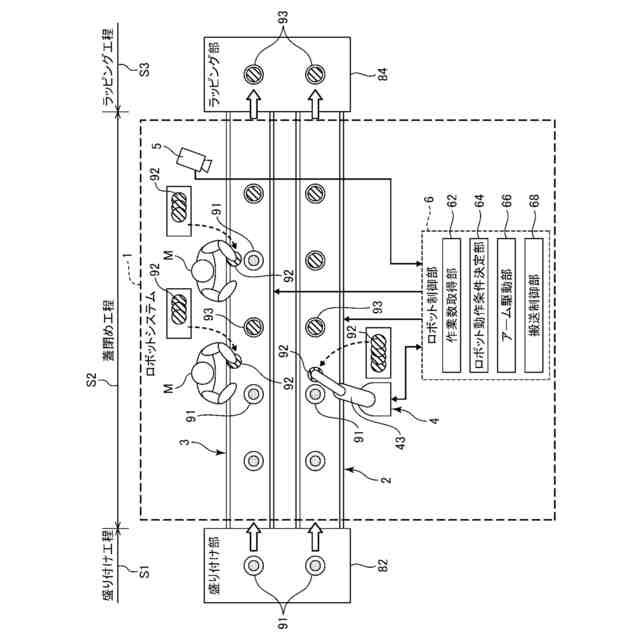
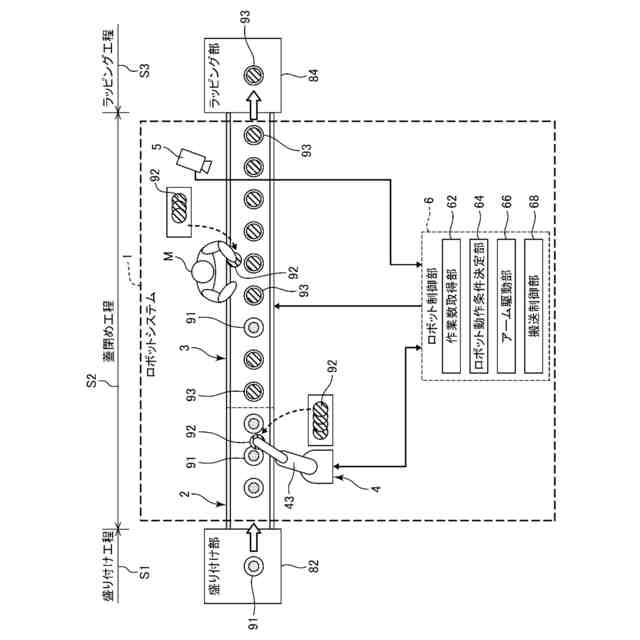
第1実施形態に係るロボットシステムを示す概略構成図である。
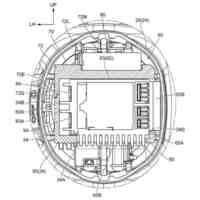
図1のロボットを示す斜視図である。
図1のロボット制御部のハードウェア構成例を示す図である。
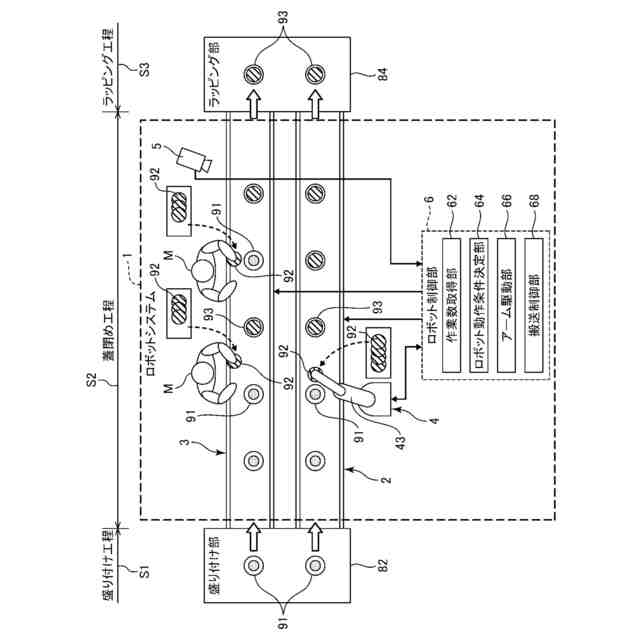
第1実施形態の変形例に係るロボットシステムを示す概略構成図である。
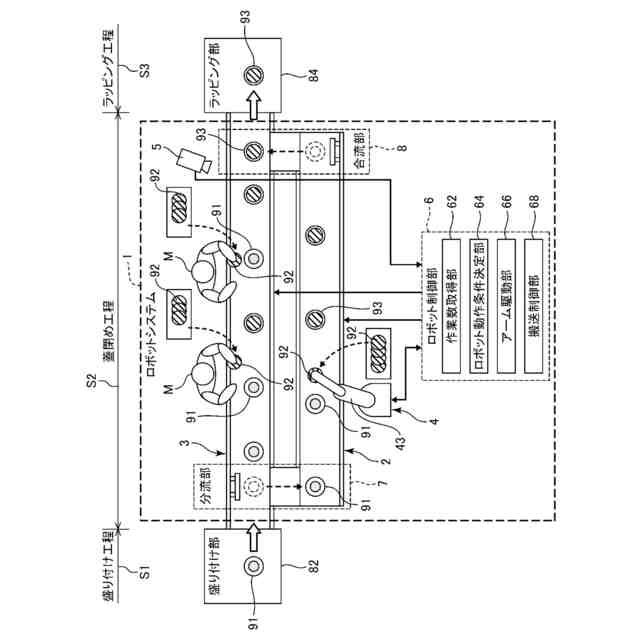
第2実施形態に係るロボットシステムを示す概略構成図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
1.第1実施形態
まず、第1実施形態に係るロボットシステムについて説明する。
【0010】
1.1.ロボットシステムの概要
図1は、第1実施形態に係るロボットシステム1を示す概略構成図である。なお、本願の各図では、互いに直交する3つの軸としてX軸、Y軸およびZ軸を設定している。各軸を矢印で表し、先端側を「プラス」、基端側を「マイナス」とする。以下の説明で、例えば「X軸方向」とは、X軸のプラス方向およびマイナス方向の双方を含む。また、以下の説明では、特に、X軸マイナス側を「上流側」、X軸プラス側を「下流側」ともいう。さらに、以下の説明では、特に、Z軸プラス側を「上方」ともいう。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
3か月前
日東工器株式会社
衝撃工具
8日前
株式会社右川ゴム製造所
把持装置
3か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
株式会社不二越
ロボット
6か月前
株式会社マキタ
動力工具
1か月前
学校法人立命館
ロボットハンド
4か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
関節機構
6か月前
川崎重工業株式会社
罫書用治具
25日前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
15日前
宮川工機株式会社
板状部品移動装置
1か月前
CKD株式会社
電動把持装置
2か月前
国立大学法人山形大学
二重関節機構
1か月前
東京都公立大学法人
ロボットハンド
1か月前
株式会社不二越
予測システム
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
6か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社ダイヘン
情報処理装置
3か月前
株式会社中村製作所
トルクドライバー
4か月前
株式会社ダイヘン
画像生成装置
3か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
6か月前
工機ホールディングス株式会社
作業機
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ