TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024062863
公報種別
公開特許公報(A)
公開日
2024-05-10
出願番号
2022170987
出願日
2022-10-25
発明の名称
作業データ収集方法、作業教示方法、作業実行方法、システム、及びプログラム
出願人
国立大学法人静岡大学
,
株式会社アラキエンジニアリング
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
9/22 20060101AFI20240501BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークに対する作業者の作業動作が反映された作業データを取得し、その作業データを利用してロボットを制御する。
【解決手段】作業データ収集システム10は、ユーザが装着するヘッドマウントディスプレイ22に対し、現実の対象ワークに仮想の領域を重畳させて表示させることにより、作業対象領域をユーザに対して表示する。そして、ユーザが、作業教示用ツール24を用いてヘッドマウントディスプレイ22に表示された対象ワークと作業対象領域とに対する作業を実施する際の、作業教示用ツール24の位置及び姿勢の時系列データを表す作業データを取得し、作業データを作業データ記憶部33へ格納させる。
【選択図】図1
特許請求の範囲
【請求項1】
ユーザが装着するヘッドマウントディスプレイに対し、現実の対象ワークに仮想の領域を重畳させて表示させることにより、作業対象領域をユーザに対して表示するとともに、
前記ユーザが、作業教示用ツールを用いて前記ヘッドマウントディスプレイに表示された前記対象ワークと前記作業対象領域とに対する作業を実施する際の、前記作業教示用ツールの位置及び姿勢の時系列データを表す作業データを取得し、前記作業データを記憶部へ格納する、
処理をコンピュータが実行する作業データ収集方法。
続きを表示(約 1,200 文字)
【請求項2】
前記仮想の領域は、前記作業対象領域に相当する、
請求項1に記載の作業データ収集方法。
【請求項3】
前記仮想の領域は、前記作業対象領域を除いた部分に対応する前記対象ワークの3次元モデルに相当する、
請求項1に記載の作業データ収集方法。
【請求項4】
前記作業対象領域を特定する際には、
作業完了前の第1ワークの3次元データを取得し、
作業完了後の第2ワークの3次元データを取得し、
前記第1ワークの3次元データと前記第2ワークの3次元データとに基づいて、前記第1ワークと前記第2ワークとの間の差異に基づいて前記作業対象領域として特定する、
請求項1に記載の作業データ収集方法。
【請求項5】
作業完了前の複数の第1ワークの3次元データを取得し、
作業完了後の第2ワークの3次元データを取得し、
複数の前記第1ワークの3次元データと前記第2ワークの3次元データとに基づいて、複数の前記第1ワークと前記第2ワークとの間の差異の平均を前記作業対象領域として特定する、
請求項1に記載の作業データ収集方法。
【請求項6】
前記現実の対象ワークに前記作業対象領域を重畳させて表示させる際に、作業済みの領域の表示態様と未作業領域の表示態様とを異ならせて表示させる、
請求項1~請求項3の何れか1項に記載の作業データ収集方法。
【請求項7】
前記現実の対象ワークに前記作業対象領域を重畳させて表示させる際に、作業のガイドとなる作業軌跡を重畳させて表示させる、
請求項1~請求項3の何れか1項に記載の作業データ収集方法。
【請求項8】
前記作業は、ワークに付着しているバリ取りの作業であり、
前記作業対象領域は、ワークに付着しているバリに対応する領域であり、
前記作業データは、前記ユーザが作業を実施している際に前記対象ワークからの反力を受けつつ得た作業データである、
請求項1に記載の作業データ収集方法。
【請求項9】
前記作業教示用ツールはマーカを備えており、
前記ヘッドマウントディスプレイは前記マーカの位置及び姿勢を検知するセンサが備えられており、
前記センサによって検知された前記マーカの位置及び姿勢の時系列データから、前記作業教示用ツールの位置及び姿勢を生成する、
請求項1に記載の作業データ収集方法。
【請求項10】
請求項1に記載の作業データ収集方法によって前記記憶部に格納された前記作業データに基づいて、前記対象ワークに対する動作を作業ロボットへ学習させる、
処理をコンピュータに実行させる作業教示方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業データ収集方法、作業教示方法、作業実行方法、システム、及びプログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1~8には、ロボットを制御する技術が開示されている。また、特許文献9には、ユーザに複合現実感の経験をもたらす技術が開示されている。また、特許文献10には、物品の設計に使用される拡張現実設計システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許6787966号公報
特許6420229号公報
特開2021-79520号公報
特開2021-529391号公報
特許7068416号公報
特許6660102号公報
特許6538760号公報
特開2000-308985号公報
特表2008-501184号公報
特許5961299号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業対象の工業製品(以下、単に「ワーク」とも称する)に対して作業をロボットに教示する(以下、単に「ティーチング」とも称する)際には、その動作をデータとして設定する必要がある。
【0005】
しかし、その作業が人手によって行われており、かつノウハウを要するような作業である場合には、そのような人の動作を表す作業データを設定することは難しい。例えば、ワークに付着したバリを除去するような作業を想定した場合、バリの形状(例えば、バリの厚さ、高さ、又は付着方向等)がワークの各箇所において異なれば、ワークの各箇所において作業者が工具を動かすスピード及び工具の当て方等は異なり、それらをティーチングペンダントなどの既存の方法でデータ化してロボットにティーチングすることは難しい。
【0006】
本発明は、上記事情に鑑みてなされたものであり、ワークに対する作業者の作業動作が反映された作業データを取得し、その作業データを利用してロボットを制御することにある。
【課題を解決するための手段】
【0007】
上記した課題を解決すべく、本発明に係る作業データ収集方法は、ユーザが装着するヘッドマウントディスプレイに対し、現実の対象ワークに仮想の領域を重畳させて表示させることにより、作業対象領域をユーザに対して表示するとともに、前記ユーザが、作業教示用ツールを用いて前記ヘッドマウントディスプレイに表示された前記対象ワークと前記作業対象領域とに対する作業を実施する際の、前記作業教示用ツールの位置及び姿勢の時系列データを表す作業データを取得し、前記作業データを記憶部へ格納する、処理をコンピュータが実行する作業データ収集方法である。
【0008】
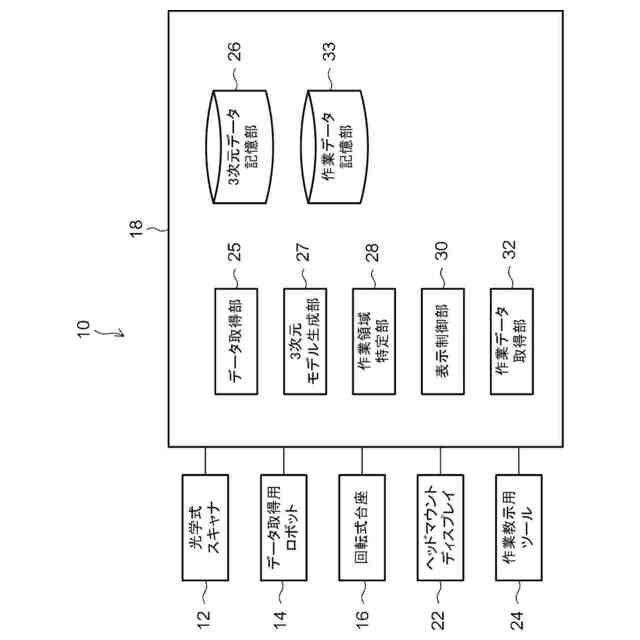
本発明に係る作業データ収集システムは、ユーザが装着するヘッドマウントディスプレイに対し、現実の対象ワークに仮想の領域を重畳させて表示させることにより、作業対象領域をユーザに対して表示する表示制御部と、ユーザが、作業教示用ツールを用いて前記ヘッドマウントディスプレイに表示された前記対象ワークと前記作業対象領域とに対する作業を実施する際の、前記作業教示用ツールの位置及び姿勢の時系列データを表す作業データを取得し、前記作業データを記憶部へ格納させるデータ取得部と、を備える作業データ収集システムである。
【発明の効果】
【0009】
本発明によれば、ワークに対する作業者の作業動作が反映された作業データを取得し、その作業データを利用してロボットを制御することができる。
【図面の簡単な説明】
【0010】
本実施形態の作業データ収集システムを示す機能ブロック図である。
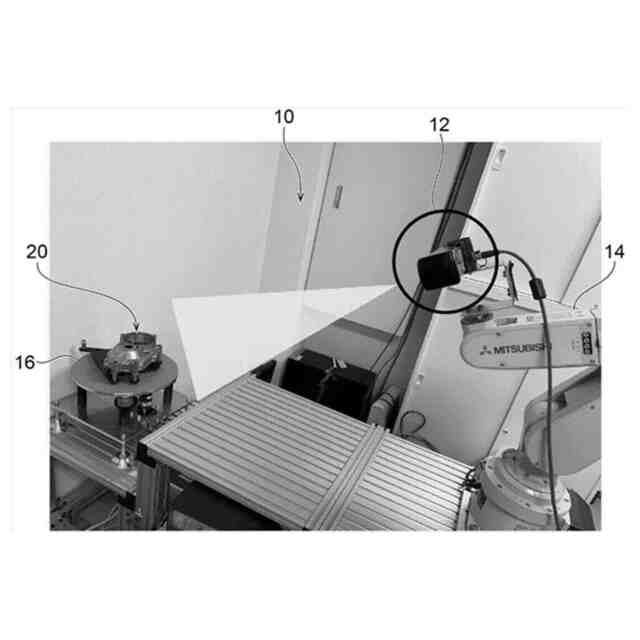
本実施形態の作業データ収集システムの構成例である。
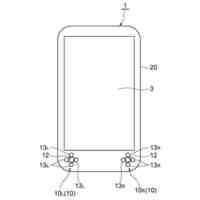
ユーザがヘッドマウントディスプレイを装着している様子を表す図である。
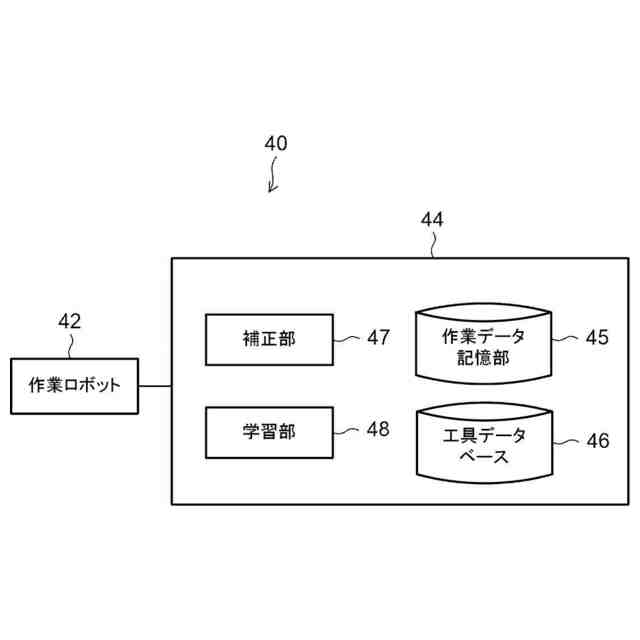
本実施形態の作業教示システムを示す機能ブロック図である。
本実施形態の作業実行システムを示す機能ブロック図である。
本実施形態の各装置を構成するコンピュータの構成例を示す図である。
作業データ収集装置が実行するモデル生成処理ルーチンの一例を示す図である。
ワークの3次元点群データの一例を示す図である。
対象ワークの3次元モデルの一例を示す図である。
第1ワークの3次元モデルと第2ワークの3次元モデルの一例を示す図である。
作業データ収集装置が実行する作業領域特定処理ルーチンの一例を示す図である。
作業データ収集装置が実行する作業データ収集処理ルーチンの一例を示す図である。
現実の対象ワーク上に仮想のバリ領域が重畳表示されている場合の一例を示す図である。
現実の対象ワーク上に仮想の作業対象領域やバリ、各種支援情報を正確に重畳表示するためのキャリブレーションの手法の一例を示す図である。
本実施形態において用いる作業教示用ツールの一例を示す図である。
作業教示用ツールの位置認識の精度確認をする様子を表す図である。
ユーザUが現実の対象ワークに対して仮想のバリ取り作業を行っている場面を表す図である。
ユーザがヘッドマウントディスプレイ越しに見た現実の対象ワークと仮想のバリ領域とが示されている図である。
作業データを説明するための図である。
作業済みの領域の表示態様と未作業領域の表示態様とを異ならせて表示させる場合の例を示す図である。
作業教示装置が実行する作業教示処理ルーチンの一例を示す図である。
作業データの補正を説明するための図である。
作業データの補正を説明するための図である。
学習済みモデルの一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人静岡大学
瞳孔検出装置及び瞳孔検出方法
26日前
国立大学法人静岡大学
エッチング装置及びエッチング方法
26日前
国立大学法人静岡大学
固体電解質、二次電池及びキャパシタ
4日前
コスモ石油株式会社
イソプレンの製造方法
1か月前
コスモ石油株式会社
イソプレンの製造方法
1か月前
国立大学法人静岡大学
一酸化炭素を含むガスを製造する方法、及び反応装置
26日前
KDDI株式会社
メッセージ配信装置、メッセージ配信方法及びメッセージ配信プログラム
1か月前
ダイキン工業株式会社
有機化合物の製造方法
28日前
個人
木製ハンマー
1か月前
個人
関節モジュール
29日前
個人
寸切りボルト回し
25日前
個人
スロットルトリガー
1か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
4か月前
コクヨ株式会社
補助器具
19日前
太陽工業株式会社
チャック装置
12日前
株式会社ツノダ
挟持工具
6か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
株式会社右川ゴム製造所
把持装置
6か月前
日東工器株式会社
衝撃工具
3か月前
個人
メンテナンス用スタンド
2か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社マキタ
動力工具
4か月前
オムロン株式会社
電動把持工具
18日前
学校法人立命館
グリッパ
1か月前
川崎重工業株式会社
罫書用治具
3か月前
CKD株式会社
把持装置
1か月前
東京計器株式会社
接触検知装置
1か月前
株式会社ダイヘン
搬送装置
4か月前
個人
回転工具およびバリ取り部品
1か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
白山工業株式会社
ロボットアーム
1か月前
トヨタ自動車株式会社
ハンド構造
3か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ