TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024060589
公報種別
公開特許公報(A)
公開日
2024-05-02
出願番号
2023175410
出願日
2023-10-10
発明の名称
死角検出制御装置および方法
出願人
コンチネンタル・オートナマス・モビリティ・ジャーマニー・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
G08G
1/16 20060101AFI20240424BHJP(信号)
要約
【課題】死角ゾーンにおいて検出された物体が警報対象物であると判定手段が判定することに基づいて、(自/対象)車両の運転者に、死角ゾーンに物体が存在することを警告する死角検出制御装置を提供する。
【解決手段】死角検出制御装置は、死角ゾーンにおいて検出された物体が警報対象物であると判定手段が判定したことに基づいて、車両の運転者に、死角ゾーンに物体が存在することを警告する警告手段に判定の結果を出力するための判定手段を備え、判定手段は、現在の検出サイクル中に死角ゾーンにおいて検出された現在の対象物に関する検出パラメータを、少なくとも前の検出サイクル中に死角ゾーンにおいて検出された対象物に対応する基準移動物に関する検出パラメータと比較することによって、死角ゾーンにおいて検出された物体が警報対象物であるかどうかを判定するように構成される。
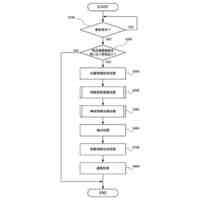
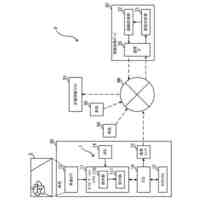
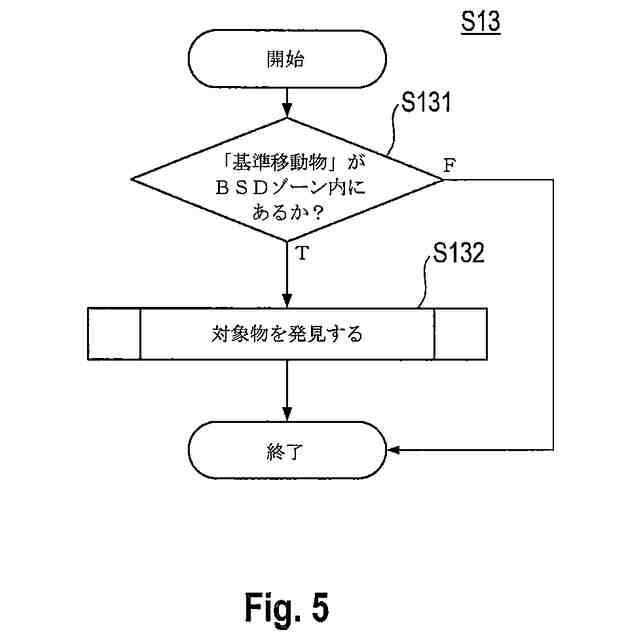
【選択図】図5
特許請求の範囲
【請求項1】
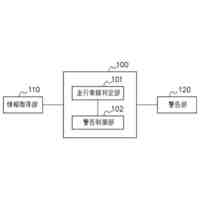
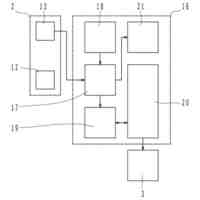
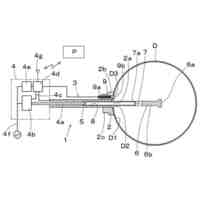
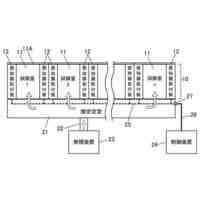
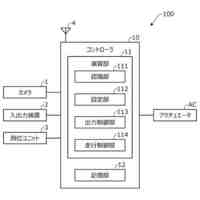
車両とともに使用するための死角検出制御装置(10)であって、
前記車両の死角ゾーンにおいて検出サイクル中に検出された物体が警報対象物であるかどうかを判定するための判定手段(20)であって、前記死角ゾーンにおいて検出された前記物体が警報対象物であると前記判定手段(20)が判定したことに基づいて、前記車両の運転者に、前記死角ゾーンに物体が存在することを警告する警告手段(30)に判定の結果を出力するための判定手段(20)を備え、
前記判定手段(20)は、現在の検出サイクル中に前記死角ゾーンにおいて検出された現在の対象物に関する検出パラメータを、少なくとも前の検出サイクル中に前記死角ゾーンにおいて検出された対象物に対応する基準移動物に関する検出パラメータと比較することによって、前記死角ゾーンにおいて検出された物体が警報対象物であるかどうかを判定するように構成される、死角検出制御装置(10)。
続きを表示(約 2,900 文字)
【請求項2】
前記判定手段(20)は、前記車両に対する、前記対象物および前記基準移動物の位置座標の差および/または前記車両に対する、前記対象物および前記基準移動物の相対速度の差に基づいて、前記現在の対象物に関する前記検出パラメータを前記基準移動物に関する前記検出パラメータと比較するように構成される、請求項1に記載の死角検出制御装置(10)。
【請求項3】
前記判定手段(20)は、前記現在の対象物に関する前記検出パラメータと、前記位置座標および/または相対速度に関して1つまたは複数の所定の条件を充足する前記基準移動物に関する前記検出パラメータとの比較に基づいて、前記現在の対象物を警報対象物であると判定するように構成される、請求項2に記載の死角検出制御装置(10)。
【請求項4】
前記判定手段(20)は、以下の条件、すなわち、
Abs(DistX-DistXref)<DistX_Thresh、
Abs(DistY-DistYref)<DistY_Thresh、
Abs(VrelX-VrelXref)<VrelX_Thresh、
Abs(VrelY-VrelYref)<VrelY_Thresh、
が充足されることに基づいて、前記現在の対象物を警報対象物であると判定するように構成され、ここで、
DistXは、前記車両に対する前記対象物のX位置であり、
DistYは、前記車両に対する前記対象物のY位置であり、
DistXrefは、前記車両に対する前記基準移動物のX位置であり、
DistYrefは、前記車両に対する前記基準移動物のY位置であり、
VrelXは、前記車両に対する前記対象物のX相対速度であり、
VrelYは、前記車両に対する前記対象物のY相対速度であり、
VrelXrefは、前記車両に対する前記基準移動物のX相対速度であり、
VrelYrefは、前記車両に対する前記基準移動物のY相対速度であり、
DistX_Thershは、X位置差分のしきい値であり、
DistY_Thershは、Y位置差分のしきい値であり、
VrelX_Thershは、X速度差分のしきい値であり、
VrelY_Thershは、Y速度差分のしきい値である、請求項3に記載の死角検出制御装置(10)。
【請求項5】
基準移動物が、現在、設定されていないことと、前記死角ゾーンにおける物体の存在を前記運転者に対して前記警告手段に警告させるためのトリガが設定されていることとに基づいて、前記死角ゾーンにおいて現在の検出サイクル中に検出された現在の対象物を前記基準移動物として設定し、および/または、
前記基準移動物が、現在、設定されているが前記死角検出ゾーンにおいて検出されていないことと、前記現在の対象物が前の検出サイクルにおいて警報対象物であると判定されたこととに基づいて、現在の検出サイクルにおいて前記死角ゾーンにおいて検出された現在の対象物を前記基準移動物として設定し、および/または、
前記基準移動物が前記死角検出ゾーンにおいて、現在、検出されていないことと、前の検出サイクルにおいて警報対象物であると判定された現在の対象物が存在しないことと、現在時刻と前記基準移動物が前記死角検出ゾーンから出たことが検出された時刻との差が所定のしきい値を超えていることとに基づいて、前記基準移動物の前記設定を初期化する、ように構成される基準移動物設定/更新手段(40)をさらに備える、請求項1~4のいずれかに記載の死角検出制御装置(10)。
【請求項6】
基準移動物設定/更新手段(40)は、前記基準移動物が前記死角検出ゾーンにおいて、現在、検出されていないことと、前の検出サイクルにおいて警報対象物であると判定された現在の対象物がないことと、前記現在時刻と前記基準移動物が前記死角検出ゾーンから出たことが検出された前記時刻との前記差が前記所定のしきい値よりも小さいこととに基づいて、前記設定された基準移動物を維持するように構成される、請求項5に記載の死角検出制御装置(10)。
【請求項7】
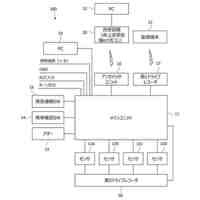
車両のための運転者支援システム(1)であって、
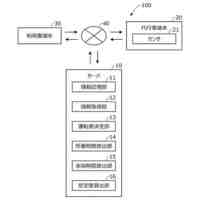
検出サイクル中に前記車両の死角ゾーンにおいて物体を検出するための検出手段(60)と、
請求項1~6のいずれかに記載の死角検出装置(10)と、
前記死角ゾーンにおいて検出された前記物体が警報対象物であると前記死角検出装置(10)の前記判定手段(20)が判定したことに基づいて、前記死角ゾーンに物体が存在することを前記車両の運転者に警告するための警告手段(30)と、を備える、運転者支援システム(1)。
【請求項8】
前記警告手段(30)は、前記死角ゾーンにおいて検出された前記物体が警報対象物であると前記判定手段(20)が判定したことに基づいて、前記車両の運転者に、前記死角ゾーンに物体が存在することを警告するように構成され、および/または、タイマTが0を超える限り、警告が維持されるように保ち、前記タイマTは、以下の関数、すなわち、
T=MIN(T
MAX
,MAX(T,TTC))-T
cycle
に基づいて更新され、ここで、
TTCは、警報対象物が警告ゾーンを出るまでの時間であり、
Tは、タイマ長であり、
T
MAX
は、タイマ長の最大しきい値であり、
T
cycle
は、検出サイクルの時間長である、請求項7に記載の運転者支援システム(1)。
【請求項9】
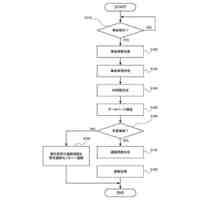
車両の死角検出を制御するためのコンピュータ実装方法であって、以下のステップ、すなわち、
前記車両の死角ゾーンにおいて検出サイクル中に検出された物体が警報対象物であるかどうかを判定するステップと、前記死角ゾーンにおいて検出された前記物体が警報対象物であると判定したことに基づいて、前記死角ゾーンに物体が存在することを前記車両の運転者に警告するための判定の結果を出力するステップとを含み、
現在の検出サイクル中に前記死角ゾーンにおいて検出された現在の対象物に関する検出パラメータを、少なくとも前の検出サイクル中に前記死角ゾーンにおいて検出された対象物に対応する基準移動物に関する検出パラメータと比較することによって、前記死角ゾーンにおいて検出された物体が警報対象物であるかどうかが判定される、コンピュータ実装方法。
【請求項10】
命令を含むコンピュータプログラムであって、前記命令は、前記プログラムがコンピュータによって実行されると、請求項9に記載のコンピュータ実装方法を前記コンピュータに実行させる、コンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の死角検出制御装置および方法に関する。さらに、本発明は、そのような死角検出制御装置を備える車両のための運転者支援システムと、死角検出方法を実行するための対応するコンピュータプログラムと、それぞれのコンピュータ可読媒体とに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両用の従来の運転者支援システムまたは先進運転支援システム(ADAS)は、例えば、従来の車両ならびに自動運転車両に関連して広く使用されている。
【0003】
多くの車両事故は、ヒューマンエラーによって引き起こされ、それらはそのような先進運転支援システム(ADAS)によって回避されたかもしれない。一般的に知られている安全上、重要なADASの用途は、例えば、歩行者の検出/回避、車線逸脱の警告/修正、交通標識の認識、自動緊急ブレーキおよび死角検出を含む。長距離レーダは、通常、緊急ブレーキアシストおよびアダプティブクルーズコントロールのような用途に使用されるが、短距離レーダは、死角検出(BSD)、後方交差交通警報および車線変更支援のような用途に関連して使用されることが多い。
【0004】
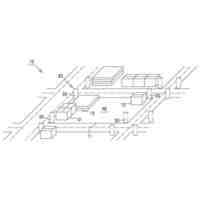
死角検出に関しては、複数の視覚ベースのアルゴリズムが、制御装置で運転者が直接見ることができない車両の周囲のエリアである、いわゆる死角の監視において車両の運転者を支援するために使用される。
【0005】
換言すれば、死角は、(サイドミラーが車両上で適切に調整されることを期待して)前方を見ている間、またはバックミラーもしくはサイドミラーのいずれかを通して見ることができない道路のエリアである。最も一般的なのは、車両の両側の後方に向かうエリアである後方の4分の1の死角である。これらの死角に入る道路の隣接車線の車両は、自動車のミラーだけでは見えない場合がある。
【0006】
一般的に知られている死角検出システムは、センサを使用して、他の方法では取得することが困難または不可能である重要な情報を運転者に提供する。例えば、死角検出システムに関連して、短距離レーダセンサまたはカメラセンサを使用することができる。いくつかのシステムは、運転者が占有車線内に移動しようとするときなど、運転者の死角内の物体を検出したときに警報を鳴らす。死角検出システムは、このエリアを監視することができる。センサは、対象車両/自車両の後方および隣の道路エリアを監視し、隙間がないか、または他の車両のような物体があるにもかかわらず、車線から出ようとしている場合に警告する。
【発明の概要】
【発明が解決しようとする課題】
【0007】
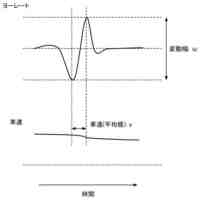
したがって、BSDシステムの機能は、他の車両のような移動物体がBSDゾーン/エリア内にあるときに運転者に警告することであるが、場合によっては、BSDゾーン内の移動物体が(BSDシステムが設けられている)自車両/対象車両と同様の速度で移動するとき、静的物体と間違えられることがあり、この誤検出のために警告が誤って停止される。
【課題を解決するための手段】
【0008】
本発明による死角検出制御装置は、車両とともに使用するためのものであり、(自/対象)車両の死角ゾーンにおいて検出サイクル中に検出された物体が警報対象物であるかどうかを判定するための判定手段であって、死角ゾーンにおいて検出された物体が警報対象物であると判定手段が判定したことに基づいて、(自/対象)車両の運転者に、死角ゾーンに物体が存在することを警告する警告手段に判定の結果を出力するための判定手段を備え、判定手段は、現在の検出サイクル中に死角ゾーンにおいて検出された現在の対象物に関する検出パラメータを、少なくとも前の検出サイクル中に死角ゾーンにおいて検出された対象物に対応する基準移動物に関する検出パラメータと比較することによって、死角ゾーンにおいて検出された物体が警報対象物であるかどうかを判定するように構成される。
【0009】
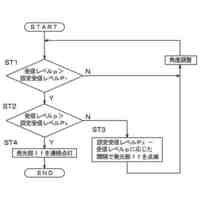
本発明による死角検出制御装置によれば、検出された物体が死角検出ゾーンを出る/出たとしても、警報対象と判定されれば、死角検出警告を出力し続けることができる。これは、対象物が警報対象と判定された場合、タイマが設定され、一定期間が経過している限り、警告が出力されるからである。
【0010】
例えば、対象物は、その位置および速度が基準移動物の位置および速度と類似している場合、すなわち、現在、検出された物体の検出パラメータと基準移動物の検出パラメータとの比較によって、警報対象物であると判定することができる。このため、現在、検出されている対象物が、最初は静止物体であると判定される可能性があったとしても、その位置や速度が基準移動物と類似していれば、警報対象であると判定される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
非常放送システム
23日前
個人
飛行体衝突回避装置
1か月前
個人
バス送迎支援システム
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
株式会社ユピテル
システム等
1日前
スズキ株式会社
車線案内装置
8日前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
警報器
1か月前
能美防災株式会社
表示灯
1か月前
個人
配車システム
1か月前
個人
配車システム
1か月前
株式会社アガタ
閉空間監視装置
1か月前
トヨタ自動車株式会社
制御装置
17日前
ニッタン株式会社
感度試験装置
1か月前
株式会社京三製作所
車両検出装置
24日前
株式会社デンソーウェーブ
監視システム
1日前
トヨタ自動車株式会社
情報収集システム
1か月前
ホーチキ株式会社
煙感知器
2か月前
能美防災株式会社
火災感知器
5日前
株式会社大林組
異常検知システム
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
井関農機株式会社
トラクタの制御システム
1か月前
ユニット株式会社
人感センサー音声警報器
1か月前
本田技研工業株式会社
運転支援装置
2か月前
本田技研工業株式会社
車両表示装置
2か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
株式会社デンソー
報知装置
1日前
能美防災株式会社
感知器
1か月前
本田技研工業株式会社
運転代行仲介装置
1か月前
大和ハウス工業株式会社
見守りシステム
1か月前
株式会社JR西日本テクシア
OD記録システム
11日前
日立建機株式会社
車両管理システム
1か月前
株式会社アサヒ電子研究所
居住者監視システム
25日前
能美防災株式会社
試験器
8日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ