TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024060582
公報種別
公開特許公報(A)
公開日
2024-05-02
出願番号
2023175313
出願日
2023-10-10
発明の名称
自車両の後方および側方に位置する検出エリアにおいて対象物を検出するための車両物体検出システムおよび方法
出願人
コンチネンタル・オートナマス・モビリティ・ジャーマニー・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
,
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
G08G
1/16 20060101AFI20240424BHJP(信号)
要約
【課題】不必要なアラームの警告/作動を回避することができる車両物体検出システム、車線変更支援システムを提供する。
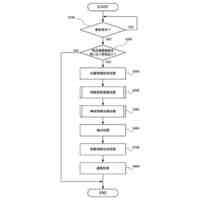
【解決手段】自車両の後方および/または側方に位置する検出エリアにおいて検出された対象物が警報対象であるかどうかを判定し、判定の結果を警告手段に出力するように構成された判定手段を備え、警告手段は、判定手段が対象物を警報対象であると判定したことに基づいて、検出エリアに対象物が存在する旨の警告を自車両の運転者に出力するように構成され、判定手段は、自車両が旋回すること、または旋回したことが検出されたことに応答して、自車両が旋回中および/または旋回後に通過した計算された軌跡である自車両の走行軌跡に基づいて、および、自車両に対する対象物の現在の相対位置にさらに基づいて、検出エリアにおいて検出された対象物が警報対象であるかどうかを判定するように構成される車両物体検出システム。
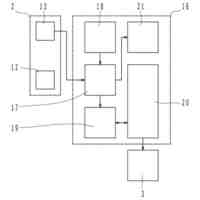
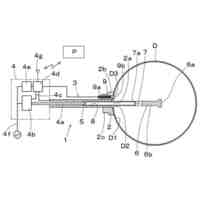
【選択図】図1
特許請求の範囲
【請求項1】
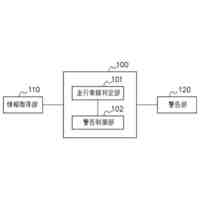
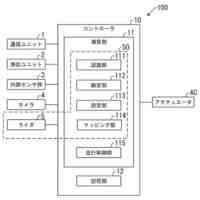
自車両(50)の後方および/または側方に位置する検出エリア(DA)において対象物(60)を検出するための車両物体検出システム(10)、好ましくは車線変更支援システムであって、
前記検出エリア(DA)において検出された対象物(60)が警報対象であるかどうかを判定し、判定の結果を警告手段(30)に出力するように構成された判定手段(20)を備え、前記警告手段は、前記判定手段が前記対象物(60)を警報対象であると判定したことに基づいて、前記検出エリア(DA)に対象物(60)が存在する旨の警告を前記自車両(50)の運転者に出力するように構成され、
前記判定手段(20)は、前記自車両(50)が旋回すること、または旋回したことが検出されたことに応答して、前記自車両が旋回中および/または旋回後に通過した計算された軌跡(80)である前記自車両(50)の走行軌跡(80)に基づいて、および、前記自車両(50)に対する前記対象物(60)の現在の相対位置にさらに基づいて、前記検出エリア(DA)において検出された前記対象物(60)が警報対象であるかどうかを判定するように構成される、車両物体検出システム(10)。
続きを表示(約 2,000 文字)
【請求項2】
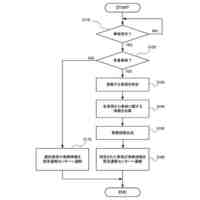
前記判定手段(20)は、前記対象物(60)の現在の相対位置と、前記自車両(50)が以前に通過した前記軌跡(80)上の点の位置との間の、前記自車両(50)の横方向の距離が指定値よりも大きいことに基づいて、前記対象物(60)が警報対象でないと判定するように構成される、請求項1に記載の車両物体検出システム(10)。
【請求項3】
前記判定手段(20)は、前記自車両(50)の後方に位置すると検出された前記対象物(60)の移動ベクトルの方向と、前記自車両(50)の長手軸との間の角度が指定角度よりも小さいことにさらに基づいて、前記対象物(60)が警報対象でないと判定するように構成される、請求項1または2に記載の車両物体検出システム(10)。
【請求項4】
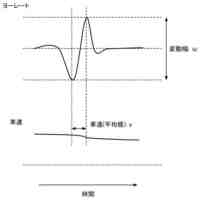
前記判定手段(20)は、前記自車両(50)の運動パラメータに基づいて、前記自車両(50)の前記走行軌跡(80)を計算するように構成された計算手段を備え、前記運動パラメータは、前記自車両(50)の位置の変化、前記自車両(50)の速度、前記自車両(50)の加速度、前記自車両(50)のヨーレート、前記自車両(50)の操舵角、および曲線半径のうちの少なくとも1つを含む、請求項1~3のいずれか1項に記載の車両物体検出システム(10)。
【請求項5】
前記車両物体検出システム(10)は、前記走行軌跡(80)を記憶するように構成された記憶手段をさらに備え、前記走行軌跡(80)は、現時点における前記自車両(50)の位置から過去の指定された時点における前記自車両(50)の位置まで記憶され、および/または、前記走行軌跡(80)は、前記自車両(50)の現在位置から測定された指定された長さにわたって記憶される、請求項1~4のいずれか1項に記載の車両物体検出システム(10)。
【請求項6】
前記判定手段(20)は、前記判定手段(20)が前記対象物(60)を警報対象でないと判定したことに基づいて、対象物が検出された場合でも警告を出力しないことを前記警告手段(30)に示す判定結果を、前記警告手段(30)に出力するように構成される、先行する請求項のいずれか1項に記載の車両物体検出システム(10)。
【請求項7】
自車両(50)のための運転者支援システム(1)であって、
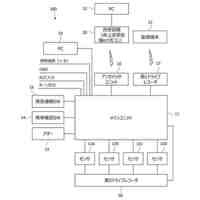
前記自車両(50)の後方および/または側方に位置する検出エリア(DA)において対象物(60)を検出するように構成された検出手段(40)と、
請求項1~6のいずれか1項に記載の車両物体検出システム(10)と、
前記車両物体検出システム(10)の前記判定手段(20)が前記対象物(60)を警報対象であると判定したことに基づいて、対象物(60)が前記検出エリア(DA)に存在することを前記自車両の運転者に警告するように構成された警告手段(30)とを備える、運転者支援システム(1)。
【請求項8】
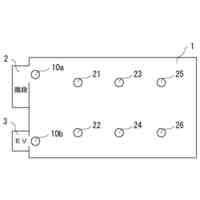
前記検出手段(40)は、前記検出エリア(DA)において対象物(60)を検出するように構成された少なくとも2つのセンサ(401、402)、好ましくは2つの短距離レーダセンサのような少なくとも2つのレーダセンサを備える、請求項7に記載の運転者支援システム(1)。
【請求項9】
特に請求項1~6のいずれか1項に記載の車両物体検出システム(10)を制御するために、自車両(50)の後方および/または側方に位置する検出エリア(DA)において対象物(60)を検出するためのコンピュータ実装方法であって、
前記検出エリア(DA)において検出された対象物(60)が警報対象であるかどうかを判定するステップと、判定の結果を警告手段(30)に出力するステップとを含み、前記警告手段は、前記対象物(60)が警報対象であるとの判定に基づいて、前記検出エリア(DA)に対象物(60)が存在する旨の警告を前記自車両(50)の運転者に出力するように構成され、
前記自車両(50)が旋回すること、または旋回したことが検出されたことに応答して、前記自車両が旋回中および/または旋回後に通過した計算された軌跡(80)である前記自車両(50)の走行軌跡(80)に基づいて、および、前記自車両(50)に対する前記対象物(60)の現在の相対位置にさらに基づいて、前記検出エリア(DA)において検出された前記対象物(60)が警報対象であるかどうかが判定される、コンピュータ実装方法。
【請求項10】
命令を含むコンピュータプログラムであって、前記プログラムがコンピュータによって実行されると、前記命令は、請求項9に記載のコンピュータ実装方法を前記コンピュータに実行させる、コンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
技術分野
本発明は、自車両の後方および/または側方に位置する検出エリアにおいて車両のような対象物を検出するための車両物体検出システム、好ましくは車線変更支援システムに関する。
続きを表示(約 1,700 文字)
【0002】
さらに、本発明は、特にそのような車両物体検出システムを制御するための、自車両の後方および/または側方に位置する検出エリアにおいて車両のような対象物を検出するためのコンピュータ実装方法に関する。
【0003】
さらに、本発明は、そのような車両物体検出システムを備える車両用運転者支援システムと、上記コンピュータ実装方法を実行するための対応するコンピュータプログラムと、それぞれの非一時的コンピュータ可読媒体とに関する。
【背景技術】
【0004】
背景
車両用の従来の運転者支援システムまたは先進運転者支援システム(ADAS)は、例えば、従来の車両および自動運転車両に関連して広く使用されており、通常、そのような車両物体検出システムを備える。
【0005】
多くの車両事故は、ヒューマンエラーによって引き起こされ、それらはそのような先進運転者支援システムによって回避されたかもしれない。一般的に知られているセーフティクリティカルADASの用途は、例えば、歩行者検出/回避、車線逸脱警告/修正または車線変更支援、交通標識認識、自動緊急ブレーキ、(後方)交差交通警報および死角検出(BSD)を含む。
【0006】
(後方)交差交通警報に関連して、それぞれの後方交差交通警報(RCTA)システムは、死角内の車両検出に用いられるもの(BSD)と同様の、レーダインフラストラクチャのような検出手段を用いることが多い。
【0007】
例えば、長距離レーダ/長距離レーダセンサは、通常、緊急ブレーキ支援およびアダプティブクルーズコントロールのような用途に用いられるが、短距離レーダは、例えば、死角検出(BSD)、後方交差交通警報、車線変更支援(LCA)および後方プリクラッシュシステムのような用途に関連して用いられることが多い。
【0008】
例えば、車線変更支援は、平行な隣接車線の場合に車線を変更するとき、または、例えば、ある車線からその車線に垂直な他の車線に曲がるときに、高速追い越しまたは横断車両および自車両の死角を移動する車両との潜在的な衝突に備えて警告を出力することによって、運転者を支援することができる。潜在的な衝突を回避するための警告は、視覚的および触覚的警告を含むカスケードフィードバックであってもよい。アクティブ車線変更支援システム(ALCAシステム)では、そのような警告の後に、衝突する可能性のある他の車両から自車両を遠ざけるために、制限された操舵トルクまたは制動トルクが続き得る。
【0009】
例えば、自車両が自車線を直進する場合、LCAシステムは、自車両の後方から来て自車両の自車線に隣接する隣接車線を走行する他車両のような対象物を検出し、潜在的な衝突に備えて警告を出力する。
【発明の概要】
【発明が解決しようとする課題】
【0010】
それにもかかわらず、LCAシステムの警告決定アルゴリズムは、自車両が2つの平行車線間の車線変更とは異なる他の車線に旋回するとき、すなわち曲がっているときの不必要な警告を抑制するために改善される必要がある。これは、自車両が旋回しており、横切/交差方向から他の車両などの対象物が来ている場合、衝突する可能性のある物体が隣接車線のいずれにあるか、他の車線にあるか、自車両の自車線にあるか、そして危険状況があるか否かを、LCAシステムが区別することが困難であるためである。特に、LCAシステムでは、交差点で自車両が旋回しているときに、例えば、交差方向から来た対象車両が自車両の側方をすり抜けようとしているのか、警告を出力すべき状況ではないのか、対象車両が自車両の後方を走行しているだけなのかを判定することは困難である。そのような場合、ALCAシステムが使用される場合、自車両が旋回している間にシステムが操舵操作に介入すると、運転者にとってさらに非常に不快になる。
【課題を解決するための手段】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
非常放送システム
24日前
個人
飛行体衝突回避装置
1か月前
個人
自動操舵制御システム
2か月前
個人
バス送迎支援システム
1か月前
日本精機株式会社
車両用計器装置
2か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
スズキ株式会社
車線案内装置
9日前
株式会社ユピテル
システム等
2日前
株式会社知財事業研究所
信号機
2か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
表示灯
1か月前
能美防災株式会社
警報器
1か月前
株式会社アガタ
閉空間監視装置
1か月前
トヨタ自動車株式会社
制御装置
18日前
個人
配車システム
1か月前
個人
配車システム
1か月前
ニッタン株式会社
感度試験装置
1か月前
株式会社京三製作所
車両検出装置
25日前
株式会社大林組
異常検知システム
1か月前
トヨタ自動車株式会社
情報収集システム
1か月前
ニッタン株式会社
表示灯付発信機
2か月前
株式会社デンソーウェーブ
監視システム
2日前
能美防災株式会社
火災感知器
6日前
ホーチキ株式会社
煙感知器
2か月前
日本信号株式会社
路上車両検知装置
2か月前
本田技研工業株式会社
運転支援装置
2か月前
本田技研工業株式会社
車両表示装置
2か月前
ユニット株式会社
人感センサー音声警報器
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
本田技研工業株式会社
外界認識装置
2か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
井関農機株式会社
トラクタの制御システム
1か月前
矢崎エナジーシステム株式会社
警報器
2か月前
株式会社デンソー
報知装置
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ