TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058542
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2023034987,2022164935
出願日
2023-03-07,2022-10-13
発明の名称
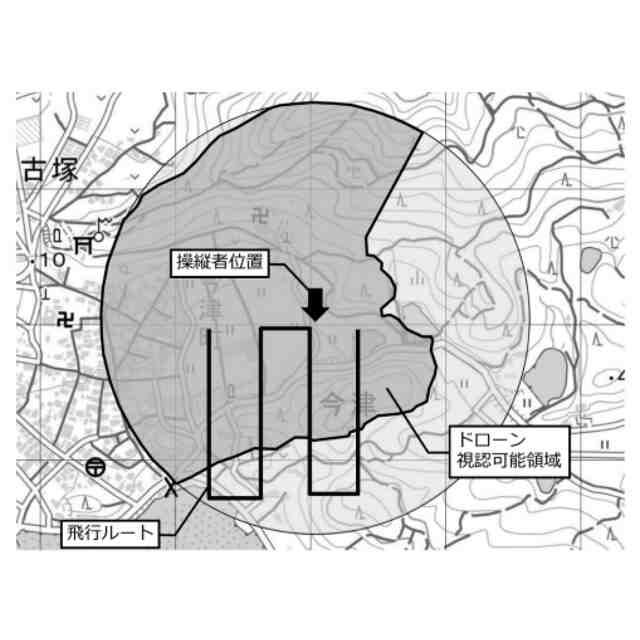
ドローン視認可能領域表示システム
出願人
九州電力株式会社
,
株式会社JCA
代理人
弁理士法人英和特許事務所
主分類
G08G
5/00 20060101AFI20240418BHJP(信号)
要約
【課題】 複数箇所に設定した操縦者位置におけるドローン視認可能領域を正確に表示できるようにすること、事前に設定された飛行ラインに沿ってドローンを操縦するのに適している操縦者位置を予め確実に決定できるようにすること。
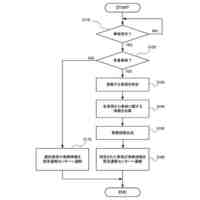
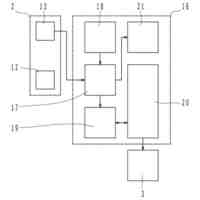
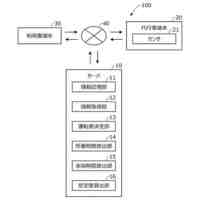
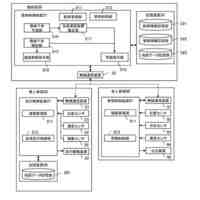
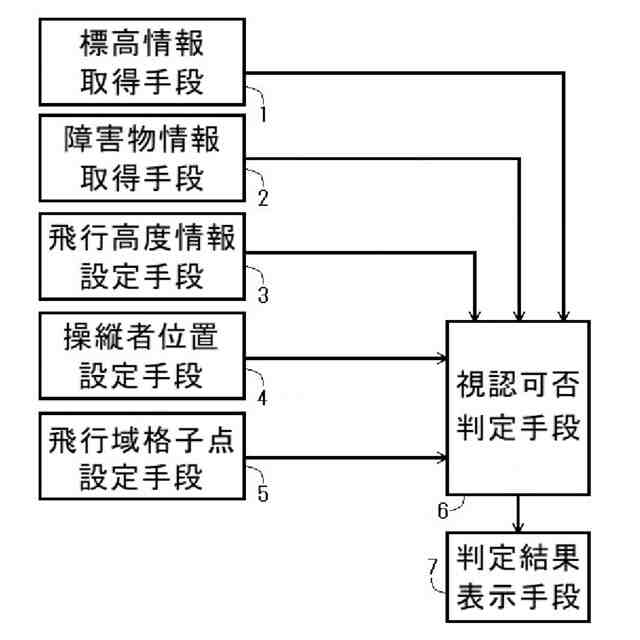
【解決手段】 表示領域内の標高情報を取得する標高情報取得手段1と、表示領域内にある障害物の位置、形状及び高さの情報を取得する障害物情報取得手段2と、ドローンの飛行高度情報設定手段3と、操縦者位置設定手段4と、ドローン飛行領域内に飛行域格子点を設定する飛行域格子点設定手段5と、各飛行域格子点上を飛行するドローンが操縦者位置から見通せるか否かを判定する視認可否判定手段6と、操縦者位置及び操縦者位置からのドローン視認可能領域を表示する判定結果表示手段7を備えているシステム。
【選択図】 図1
特許請求の範囲
【請求項1】
ドローン飛行領域より広い範囲内のいずれかの箇所に設定された操縦者位置におけるドローン視認可能領域を表示させるドローン視認可能領域表示システムであって、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内の標高情報を取得する標高情報取得手段と、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内に存在する障害物の位置、形状及び高さの情報を取得する障害物情報取得手段と、
ドローンを飛行させる高度情報を設定する飛行高度情報設定手段と、
前記ドローン飛行領域内に飛行域格子点を設定する飛行域格子点設定手段と、
前記飛行域格子点における標高情報に前記高度情報を足した高さにある点が前記操縦者位置から見通せるか否かを判定する視認可否判定手段と、
前記操縦者位置を表示するとともに、各飛行域格子点の近傍に、前記視認可否判定手段による各飛行域格子点についての判定結果を表示する判定結果表示手段と、を備え
、
前記操縦者位置は、前記ドローン飛行領域より広い範囲内のいずれかの箇所に複数設定されており、
前記視認可否判定手段は、複数設定されている前記操縦者位置毎に、前記飛行域格子点における標高情報に前記高度情報を足した高さにある点が前記操縦者位置から見通せるか否かを判定し、
前記判定結果表示手段は、複数設定されている前記操縦者位置毎に、該操縦者位置を表示するとともに、各飛行域格子点の近傍に、前記視認可否判定手段による各飛行域格子点についての判定結果を表示する
ことを特徴とするドローン視認可能領域表示システム。
続きを表示(約 1,100 文字)
【請求項2】
前記ドローン飛行領域内に、前記ドローンが飛行する予定の飛行ルートを設定する飛行ルート設定手段をさらに備え、
前記判定結果表示手段は、前記操縦者位置及び前記判定結果に重ねて、前記飛行ルートを表示する
ことを特徴とする請求項1記載のドローン視認可能領域表示システム。
【請求項3】
ドローン飛行領域より広い範囲内のいずれかの箇所に設定された操縦者位置におけるドローン視認可能領域を表示させるドローン視認可能領域表示システムであって、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内の標高情報を取得する標高情報取得手段と、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内に存在する障害物の位置、形状及び高さの情報を取得する障害物情報取得手段と、
ドローンを飛行させる高度情報を設定する飛行高度情報設定手段と、
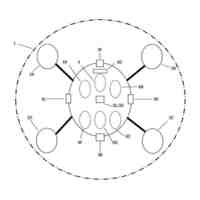
前記操縦者位置を中心として一定角度毎に、水平な複数の放射線を設定する放射線設定手段と、
前記放射線毎に、該放射線上における標高情報に前記高度情報を足した高さにある線上にある点のうち、前記操縦者位置から見通せない最も近い点の水平距離を計算する近点水平距離計算手段と、
前記操縦者位置を表示するとともに、前記放射線毎に、前記操縦者位置から前記水平距離分離れている不可視近点を表示する不可視近点表示手段と、を備え
、
前記操縦者位置は、前記ドローン飛行領域より広い範囲内のいずれかの箇所に複数設定されており、
前記近点水平距離計算手段は、複数設定された前記操縦者位置に対して、該操縦者位置を中心として一定角度毎に水平な複数の放射線を設定し、
前記近点水平距離計算手段は、複数設定された前記操縦者位置に対して、それぞれ該操縦者位置を中心として設定された放射線毎に、該放射線上における標高情報に前記高度情報を足した高さにある線上にある点のうち、前記操縦者位置から見通せない最も近い点の水平距離を計算し、
前記不可視近点表示手段は、複数設定されている前記操縦者位置毎に、該操縦者位置を表示するとともに、前記放射線毎に前記不可視近点を表示する
ことを特徴とするドローン視認可能領域表示システム。
【請求項4】
前記ドローン飛行領域内に、前記ドローンが飛行する予定の飛行ルートを設定する飛行ルート設定手段をさらに備え、
前記不可視近点表示手段は、前記操縦者位置及び前記不可視近点に重ねて、前記飛行ルートを表示する
ことを特徴とする請求項
3
記載のドローン視認可能領域表示システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドローン視認可能領域表示システ
ムに
関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
近年、災害現場の状況把握や警備を目的とした撮影、測量や点検を目的としたデータ取得及び農薬散布や物資運搬の作業等、様々な分野でドローンが利活用されている。
そして、航空法第132条の2第1項第6号の規定により、ドローンを飛行させる者は、ドローン及びその周囲の状況を目視により常時監視する必要があるが、この規定を遵守するためには、ドローンの飛行経路を変更する度に、操縦者等がドローン及びその周囲の状況を常時監視できる場所(ホームポイント)を選定したり、途中でホームポイントを移動したりしなければならず、事前準備に時間と手間がかかるという問題が生じている。
【0003】
例えば、特許文献1(特開2017-146292号公報)には、無人飛行体の飛行ルートを生成する飛行ルート生成装置であって、飛行ルートの入力を受け付ける入力部と、操縦者等の位置及びその位置に基づく視認可能領域を表示する表示部と、入力された飛行ルートの全てが視認可能領域内に含まれる場合は、その飛行ルートを確定し、飛行ルートの少なくとも一部が視認可能領域から外れている場合は、飛行ルートを確定せず警告メッセージを表示部に表示するものが記載されている(特に、請求項8及び図3を参照)。
【0004】
また、特許文献2(特許第7120002号公報)には、無人航空機の飛行位置が所定の範囲外か範囲内かに応じて制御態様を切り替え可能な飛行装置において、無人航空機が飛行できる所定の範囲の設定は、操縦者が無人航空機を確認できる範囲とし、障害物により操縦者から遮蔽される範囲は所定の範囲に含まれないようにしてもよい点(特に、請求項1、2、段落0045~0050、0118及び図7を参照)が記載されている。
【0005】
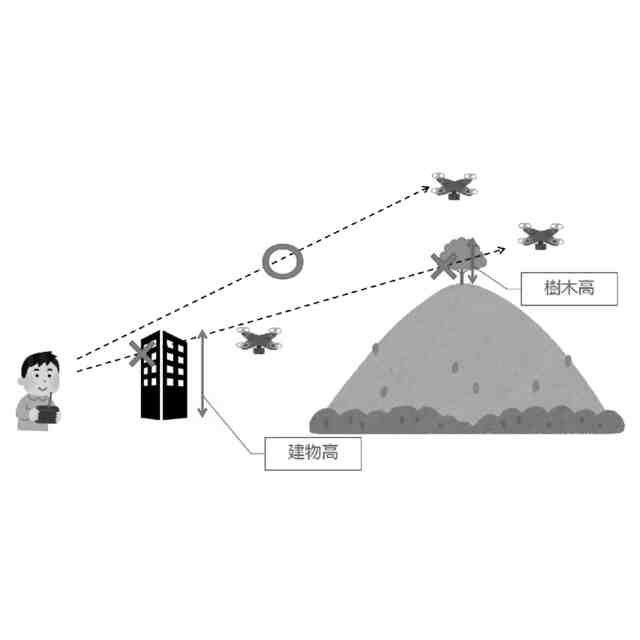
しかし、特許文献1に記載されている飛行ルート生成装置は、操縦者等の位置及びその位置に基づく視認可能領域を表示するが、特許文献1には操縦者等の位置から樹木やビル等で見えない範囲を考慮することは記載されておらず、実際は操縦者等の位置からは見えない範囲を含む飛行ルートを確定してしまうおそれがある。
また、特許文献2に記載されている飛行装置は、飛行中の無人航空機が送信した各種情報に基づいて、無人航空機が飛行できる所定の範囲を設定するものであって、無人航空機を飛行させる前に所定の範囲を設定するものではない。
そのため、無人航空機の飛行位置が所定の範囲外になってしまう場合があり、所定の範囲外である場合には請求項6に記載されるように、所定の範囲内へ飛行させる等の第1制御(フィードバック制御)を行う等、複雑で高価な飛行制御部が必要である。
【先行技術文献】
【特許文献】
【0006】
特開2017-146292号公報(特許第6617080号公報)
特許第7120002号公報(国際公開2017/170148号)
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、このような問題を解決するために、ドローンを操縦又は監視する操縦者や監視者の位置(以下「操縦者位置」という。)からドローンを視認することができる領域(以下「ドローン視認可能領域」という。)を正確に表示できるようにすることを第1の課題とし、操縦者位置を複数箇所に設定しておき、各操縦者位置におけるドローン視認可能領域を正確に表示できるようにすることを第2の課題としている。
また、本発明は、事前に設定された飛行ラインに沿ってドローンを操縦して飛行させることができる操縦者位置を予め確実に決定できるようにすることを第3の課題と
して
いる。
【課題を解決するための手段】
【0008】
請求項1に係る発明は、ドローン飛行領域より広い範囲内のいずれかの箇所に設定された操縦者位置におけるドローン視認可能領域を表示させるドローン視認可能領域表示システムであって、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内の標高情報を取得する標高情報取得手段と、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内に存在する障害物の位置、形状及び高さの情報を取得する障害物情報取得手段と、
ドローンを飛行させる高度情報を設定する飛行高度情報設定手段と、
前記ドローン飛行領域内に飛行域格子点を設定する飛行域格子点設定手段と、
前記飛行域格子点における標高情報に前記高度情報を足した高さにある点が前記操縦者位置から見通せるか否かを判定する視認可否判定手段と、
前記操縦者位置を表示するとともに、各飛行域格子点の近傍に、前記視認可否判定手段による各飛行域格子点についての判定結果を表示する判定結果表示手段と、を備え
、
前記操縦者位置は、前記ドローン飛行領域より広い範囲内のいずれかの箇所に複数設定されており、
前記視認可否判定手段は、複数設定されている前記操縦者位置毎に、前記飛行域格子点における標高情報に前記高度情報を足した高さにある点が前記操縦者位置から見通せるか否かを判定し、
前記判定結果表示手段は、複数設定されている前記操縦者位置毎に、該操縦者位置を表示するとともに、各飛行域格子点の近傍に、前記視認可否判定手段による各飛行域格子点についての判定結果を表示する
ことを特徴とする。
【0009】
請求項
2
に係る発明は、請求項1記載のドローン視認可能領域表示システムにおいて、
前記ドローン飛行領域内に、前記ドローンが飛行する予定の飛行ルートを設定する飛行ルート設定手段をさらに備え、
前記判定結果表示手段は、前記操縦者位置及び前記判定結果に重ねて、前記飛行ルートを表示することを特徴とする。
【0010】
請求項
3
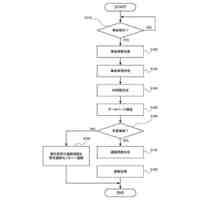
に係る発明は、ドローン飛行領域より広い範囲内のいずれかの箇所に設定された操縦者位置におけるドローン視認可能領域を表示させるドローン視認可能領域表示システムであって、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内の標高情報を取得する標高情報取得手段と、
前記ドローン飛行領域及び前記操縦者位置を含む表示領域内に存在する障害物の位置、形状及び高さの情報を取得する障害物情報取得手段と、
ドローンを飛行させる高度情報を設定する飛行高度情報設定手段と、
前記操縦者位置を中心として一定角度毎に、水平な複数の放射線を設定する放射線設定手段と、
前記放射線毎に、該放射線上における標高情報に前記高度情報を足した高さにある線上にある点のうち、前記操縦者位置から見通せない最も近い点の水平距離を計算する近点水平距離計算手段と、
前記操縦者位置を表示するとともに、前記放射線毎に、前記操縦者位置から前記水平距離分離れている不可視近点を表示する不可視近点表示手段と、を備え
、
前記操縦者位置は、前記ドローン飛行領域より広い範囲内のいずれかの箇所に複数設定されており、
前記近点水平距離計算手段は、複数設定された前記操縦者位置に対して、該操縦者位置を中心として一定角度毎に水平な複数の放射線を設定し、
前記近点水平距離計算手段は、複数設定された前記操縦者位置に対して、それぞれ該操縦者位置を中心として設定された放射線毎に、該放射線上における標高情報に前記高度情報を足した高さにある線上にある点のうち、前記操縦者位置から見通せない最も近い点の水平距離を計算し、
前記不可視近点表示手段は、複数設定されている前記操縦者位置毎に、該操縦者位置を表示するとともに、前記放射線毎に前記不可視近点を表示する
ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非常放送システム
14日前
個人
飛行体衝突回避装置
1か月前
個人
バス送迎支援システム
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
表示灯
1か月前
能美防災株式会社
警報器
1か月前
トヨタ自動車株式会社
制御装置
8日前
個人
配車システム
1か月前
個人
配車システム
1か月前
ニッタン株式会社
感度試験装置
1か月前
株式会社アガタ
閉空間監視装置
1か月前
株式会社京三製作所
車両検出装置
15日前
株式会社大林組
異常検知システム
1か月前
トヨタ自動車株式会社
情報収集システム
24日前
ホーチキ株式会社
煙感知器
1か月前
井関農機株式会社
トラクタの制御システム
1か月前
ユニット株式会社
人感センサー音声警報器
1か月前
トヨタ自動車株式会社
運転支援装置
28日前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
本田技研工業株式会社
運転支援装置
1か月前
本田技研工業株式会社
車両表示装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
本田技研工業株式会社
運転代行仲介装置
1か月前
トヨタ自動車株式会社
車両情報配信装置
1か月前
日立建機株式会社
車両管理システム
28日前
トヨタ自動車株式会社
渋滞情報作成装置
16日前
株式会社アサヒ電子研究所
居住者監視システム
16日前
表示灯株式会社
災害警報システム
14日前
大和ハウス工業株式会社
見守りシステム
29日前
能美防災株式会社
感知器
1か月前
株式会社JR西日本テクシア
OD記録システム
2日前
能美防災株式会社
試験器
1か月前
能美防災株式会社
差動式分布型感知器
1か月前
鹿島建設株式会社
警告装置
21日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ