TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057631
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164389
出願日
2022-10-13
発明の名称
制御装置、制御システム、制御方法、およびプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20240418BHJP(信号)
要約
【課題】隊列の隣接車線を走行する車両が、車間距離を広げた隊列へ割り込みすることを可能にする制御装置を提供する。
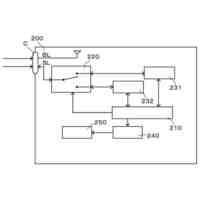
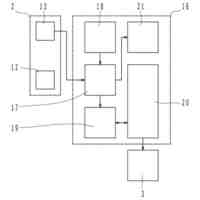
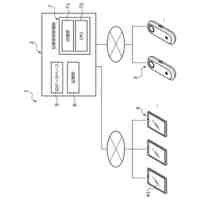
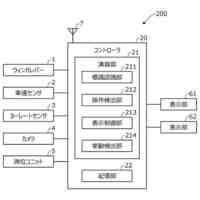
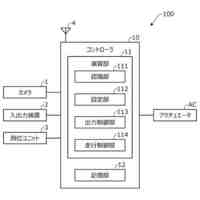
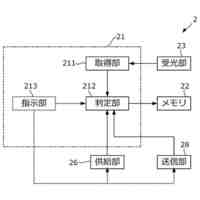
【解決手段】同一車線上の隊列を構成する複数の車両の走行を通信により制御する制御装置(2020)であって、隊列の隣接車線を走行している隣接車両がウィンカーを出していることを検出する検出手段(2022)と、隊列を構成する前記複数の車両の少なくとも一つの車両の車間距離を制御する制御手段(2024)とを有し、制御手段は、隣接車両がウィンカーを出していることが検出された場合、車間距離を変更する。
【選択図】図3
特許請求の範囲
【請求項1】
同一車線上の隊列を構成する複数の車両の走行を通信により制御する制御装置であって、
前記隊列の隣接車線を走行している隣接車両がウィンカーを出していることを検出する検出手段と、
前記隊列を構成する前記複数の車両の少なくとも一つの車両の車間距離を制御する制御手段と、を有し、
前記制御手段は、前記隣接車両がウィンカーを出していることが検出された場合、前記車間距離を変更することを特徴とする制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記隊列を構成する前記複数の車両の少なくとも一つの位置データを取得する位置取得手段と、
前記位置データに基づいて前記隣接車線の車両の割り込みを許容するか否かを判定する判定手段と、を更に有し、
前記判定手段が前記隣接車線の前記車両の割り込みを許容すると判定した場合、前記制御手段は、前記ウィンカーを出している前記車両が検出された場合でも、前記車間距離を変更しないことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記制御手段は、
前記ウィンカーを出している前記車両が検出されていない場合、前記車間距離を第1距離に制御し、
前記ウィンカーを出している前記車両が検出された場合、前記車間距離を前記第1距離よりも長い第2距離に制御することを特徴とする請求項1に記載の制御装置。
【請求項4】
前記制御手段は、前記車間距離を前記第1距離から前記第2距離に変更した後、前記ウィンカーを出している前記車両が前記隊列に割り込んでから、前記車両が前記隊列から抜けたと判定した場合、前記車間距離を前記第2距離から前記第1距離へ変更することを特徴とする請求項3に記載の制御装置。
【請求項5】
前記制御手段は、前記同一車線上において、前記隊列を構成する最後尾の車両から前記隊列の後方に位置する後方車両までの第1距離に基づいて、前記車間距離の制御を変更することを特徴とする請求項1に記載の制御装置。
【請求項6】
前記制御手段は、前記同一車線上において、前記隊列を構成する先頭車両から前記隊列の前方に位置する前方車両までの第2距離に基づいて、前記車間距離の制御を変更することを特徴とする請求項1に記載の制御装置。
【請求項7】
前記制御手段は、前記同一車線上において、前記隊列を構成する最後尾の車両から前記隊列の後方に位置する後方車両までの第1距離が第1閾値の範囲内であり、かつ前記隊列を構成する先頭車両から前記隊列の前方に位置する前方車両までの第2距離が第2閾値の範囲内であると判定した場合、前記先頭車両から前記最後尾の車両までの距離が変化しないように、前記車間距離を変更することを特徴とする請求項1に記載の制御装置。
【請求項8】
前記制御手段は、前記同一車線上において、前記隊列を構成する最後尾の車両から前記隊列の後方に位置する後方車両までの第1距離が第1閾値の範囲内であり、かつ前記隊列を構成する先頭車両から前記隊列の前方に位置する前方車両までの第2距離が第2閾値の範囲内ではないと判定した場合、前記隊列を構成する特定の車両よりも前方の車両を加速して前記車間距離を変更することを特徴とする請求項1に記載の制御装置。
【請求項9】
前記制御手段は、前記同一車線上において、前記隊列を構成する最後尾の車両から前記隊列の後方に位置する後方車両までの第1距離が第1閾値の範囲内ではないと判定した場合、前記隊列における特定の車両よりも後方の車両を減速して前記車間距離を変更することを特徴とする請求項1に記載の制御装置。
【請求項10】
前記制御手段は、前記ウィンカーを出している前記車両の速度に基づいて、前記車間距離の制御を変更することを特徴とする請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御システム、制御方法、およびプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、車車間通信(CACC)により、隊列を構成する複数の車両の走行を制御する隊列走行制御が知られている。このような制御により、隊列を構成する複数の車両のうち先頭車両のみを有人としつつ後続車両を無人として、隊列走行が可能である。
【0003】
しかし、例えば、隊列が高速道路のIC(インターチェンジ)出口やSA(サービスエリア)/PA(パーキングエリア)入口を塞いでしまうことで、隣接車線を走行する車両が高速道路のIC出口またはSA/PA入口へ侵入することができない可能性がある。このような場合、隊列の車間距離を広げるように制御することが考えられるが、車間距離を広げると、高速道路のIC出口またはSA/PA入口へ侵入する目的の車両以外の車両が隊列に割り込む可能性がある。
【0004】
特許文献1には、前方監視カメラを用いて、高速道路の出口付近において、隣接車線を走行する車両が白線を跨いだことにより隊列に割り込んできたことを検出した場合、割り込み位置よりも後方の車を減速して車間距離を広げる方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2015-022421号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示された方法では、隣接車線を走行する車両は、
隊列を構成するトラックが車間距離を広げる前にトラックの車間に割り込む必要がある。
【0007】
そこで本発明は、隊列の隣接車線を走行する車両が、車間距離を広げた隊列へ割り込みすることを可能にする制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一側面としての制御装置は、同一車線上の隊列を構成する複数の車両の走行を通信により制御する制御装置であって、前記隊列の隣接車線を走行している隣接車両がウィンカーを出していることを検出する検出手段と、前記隊列を構成する前記複数の車両の少なくとも一つの車両の車間距離を制御する制御手段とを有し、前記制御手段は、前記隣接車両がウィンカーを出していることが検出された場合、前記車間距離を変更する。
【0009】
本発明の他の目的及び特徴は、以下の実施形態において説明される。
【発明の効果】
【0010】
本発明によれば、隊列の隣接車線を走行する車両が、車間距離を広げた隊列へ割り込みすることを可能にする制御装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
はしごの道路標示
2か月前
個人
非常放送システム
9日前
個人
飛行体衝突回避装置
1か月前
個人
自動操舵制御システム
1か月前
個人
バス送迎支援システム
29日前
日本精機株式会社
車両用計器装置
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
株式会社知財事業研究所
信号機
1か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
表示灯
25日前
能美防災株式会社
警報器
1か月前
ニッタン株式会社
感度試験装置
25日前
株式会社アガタ
閉空間監視装置
26日前
個人
配車システム
1か月前
個人
配車システム
1か月前
トヨタ自動車株式会社
制御装置
3日前
ニッタン株式会社
表示灯付発信機
1か月前
株式会社大林組
異常検知システム
1か月前
ホーチキ株式会社
煙感知器
1か月前
株式会社京三製作所
車両検出装置
10日前
トヨタ自動車株式会社
情報収集システム
19日前
井関農機株式会社
トラクタの制御システム
1か月前
本田技研工業株式会社
車両表示装置
1か月前
トヨタ自動車株式会社
運転支援装置
23日前
本田技研工業株式会社
外界認識装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
本田技研工業株式会社
運転支援装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
日本信号株式会社
路上車両検知装置
1か月前
ユニット株式会社
人感センサー音声警報器
25日前
矢崎エナジーシステム株式会社
警報器
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
中国電力株式会社
遠隔見守りシステム
1か月前
株式会社アサヒ電子研究所
居住者監視システム
11日前
能美防災株式会社
試験器
25日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ