TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024055737
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2023048774
出願日
2023-03-24
発明の名称
ロボットアーム及びその関節モジュール
出願人
深せん市越疆科技股ふん有限公司
,
SHENZHEN YUEJIANG TECHNOLOGY CO.,LTD.
代理人
TRY国際弁理士法人
主分類
B25J
17/00 20060101AFI20240411BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】構成要素の接続構造を容易にし、組み立てる前にそれぞれ関連する性能試験を行えるようなロボットアーム及び関節モジュールを提供する。
【解決手段】関節モジュールは、関節ハウジング、駆動アセンブリ、減速アセンブリ、第1、第2、第3の締結具を含む。駆動アセンブリは、出力軸、下軸受ホルダ、下軸受を含む。下軸受の内輪、外輪は、それぞれ出力軸、下軸受ホルダに接続される。第1の締結具は、下軸受ホルダを関節ハウジングに固定する。第2の締結具は、減速アセンブリを関節ハウジングに固定する。第3の締結具は、減速アセンブリの入力軸を出力軸に固定する。駆動アセンブリの出力軸と減速アセンブリの入力軸は、単独の構造体であり、取り外し可能に接続されている。駆動アセンブリと減速アセンブリは組み立てる前にそれぞれ関連する性能試験を行うことができ、メンテナンスにも有利であり、減速アセンブリの振動と騒音の低減にも有利である。
【選択図】図13
特許請求の範囲
【請求項1】
関節モジュールは、関節ハウジング、駆動アセンブリ、減速アセンブリ、第1の締結具、第2の締結具及び第4の締結具を含み、
前記駆動アセンブリは、下軸受ホルダと下軸受を含み、前記下軸受の外輪は、前記下軸受ホルダに接続され、前記第1の締結具は、前記下軸受ホルダを前記関節ハウジングに固定し、前記第2の締結具は、前記減速アセンブリを前記関節ハウジングに固定し、
ここで、前記減速アセンブリは、入力軸と、前記入力軸に接続された波発生器と、前記波発生器を取り囲むように嵌着されたフレキシブルホイールと、前記フレキシブルホイールを取り囲むように嵌着された剛性ホイールと、外軸受とを含み、
前記フレキシブルホイールは、筒状噛合部と、前記筒状噛合部の一端に湾曲するように接続された環状折り返し部とを含み、前記環状折り返し部は、前記筒状噛合部の外側に延び、前記筒状噛合部は、前記剛性ホイールと部分的に噛合し、前記第4の締結具は、前記環状折り返し部を前記外軸受の外輪に固定し、前記第4の締結具の前記環状折り返し部から突出した部分は、前記下軸受ホルダの逃げ穴内に位置し、前記剛性ホイールは、前記外軸受の内輪に接続されていることを特徴とするロボットアームの関節モジュール。
続きを表示(約 1,500 文字)
【請求項2】
前記関節モジュールは、第3の締結具を含み、前記駆動アセンブリは、前記下軸受ホルダの内輪に接続される出力軸を含み、前記第3の締結具は、前記入力軸を前記出力軸に固定することを特徴とする請求項1に記載のロボットアームの関節モジュール。
【請求項3】
前記関節ハウジングの内側には、第1の環状支持台が設けられており、前記第1の締結具は、前記下軸受ホルダを貫通し、且つ前記第1の環状支持台に接続されて、前記下軸受ホルダを前記第1の環状支持台に圧持し、
前記第2の締結具は、順次に前記減速アセンブリ及び前記下軸受ホルダを貫通し、且つ前記第1の環状支持台に接続されて、前記減速アセンブリ及び前記下軸受ホルダを前記第1の環状支持台に圧持することを特徴とする請求項2に記載のロボットアームの関節モジュール。
【請求項4】
前記出力軸は、前記下軸受ホルダから突き出しており、前記入力軸と前記出力軸との間の取付面は、前記出力軸の軸方向において前記減速アセンブリ内に位置することを特徴とする請求項3に記載のロボットアームの関節モジュール。
【請求項5】
前記下軸受ホルダは、下筒状部と、前記下筒状部の一端に湾曲するように接続された下固定部とを含み、前記下固定部は、前記下筒状部の外側に延び、前記下筒状部は、前記下軸受に嵌着され、前記第1の締結具と前記第2の締結具は、前記下固定部を貫通し、前記下軸受は、少なくとも一部が前記減速アセンブリ内に位置することを特徴とする請求項3に記載のロボットアームの関節モジュール。
【請求項6】
前記下軸受ホルダは、前記下筒状部の他端に湾曲するように接続された下フランジ部を含み、前記下フランジ部と前記下固定部は、逆方向に向かって延び、前記下軸受の外輪は、前記下フランジ部に支持されていることを特徴とする請求項5に記載のロボットアームの関節モジュール。
【請求項7】
前記駆動アセンブリは、前記第1の環状支持台内に嵌設されたステータと、前記ステータの内側に位置するロータとを含み、
前記出力軸は、その軸方向に沿って中間固定セグメントと下固定セグメントとに区分され、
前記中間固定セグメントの外径は、前記中間固定セグメントと前記下固定セグメントとの間に外段差面を形成するように前記下固定セグメントの外径よりも大きく、前記ロータは、前記中間固定セグメントに固定され、前記下軸受は、前記下固定セグメントに嵌着され、前記下軸受の内輪は、前記外段差面に支持され、前記外段差面と前記下フランジ部は、前記出力軸の軸方向において前記下軸受の両側に位置することを特徴とする請求項6に記載のロボットアームの関節モジュール。
【請求項8】
前記駆動アセンブリは、前記下固定部に接続され、且つ前記下フランジ部と共に前記下軸受の外輪を挟持する下圧リングと、前記下固定セグメントに接続され、且つ前記中間固定セグメントと共に前記下軸受の内輪を挟持する下係止リングとをさらに含むことを特徴とする請求項7に記載のロボットアームの関節モジュール。
【請求項9】
前記ステータと前記下軸受との前記出力軸の径方向に沿った正投影は、重ならないことを特徴とする請求項7に記載のロボットアームの関節モジュール。
【請求項10】
前記出力軸は、中空構造に設けられ、
前記下固定セグメントの内径は、前記第3の締結具が前記入力軸を前記下固定セグメントの端部に固定できるように、前記中間固定セグメントの内径よりも小さいことを特徴とする請求項7に記載のロボットアームの関節モジュール。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、ロボットアームの技術分野に関し、具体的にロボットアーム及びその関節モジュールに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
科学技術の絶えなる発展に伴い、自動化の程度を高め人的コストを削減するために、生産製造には単調で反復性が高く、危険性が高い作業に代えてロボットアームを必要とするだけでなく、より難度が高くより複雑でより精度の高い特殊な任務を共同で達成するために、ロボットアームとオペレータによるマンマシン連携を必要とする。そのため、ロボットアームの関節モジュールにおいて、駆動アセンブリ、減速アセンブリなどの部品の性能及びその信頼性が特に重要である。しかしながら、関連技術(例えば、CN214520197U)では、駆動アセンブリのロータは減速アセンブリの入力軸に固定されている。即ち、駆動アセンブリは独立した出力軸を有しておらず、駆動アセンブリは関連する性能試験を単独で行うことが困難であり、その信頼性を保証することが困難である。これにより、駆動アセンブリは減速アセンブリ及びハウジングと組み立てられ後こそ関連する性能試験を行うことができる。駆動アセンブリの性能が不合格であれば、それを減速アセンブリから取り外す必要がある。これにより、複数回の着脱の問題があるだけでなく、一部の部品が着脱中に破損するリスクがあり、生産効率を大幅に低下させ、生産コストも増加される。
【発明の概要】
【発明が解決しようとする課題】
【0003】
従来技術の問題に鑑みて、本願発明は、駆動アセンブリと減速アセンブリとの接続構造を容易にし、組み立てる前にそれぞれ関連する性能試験を行えるようなロボットアーム及びその関節モジュールを提供することを目的とする。
【課題を解決するための手段】
【0004】
本願発明の実施形態によるロボットアームの関節モジュールは、関節ハウジング、駆動アセンブリ、減速アセンブリ、第1の締結具、第2の締結具及び第4の締結具を含み、
前記駆動アセンブリは、下軸受ホルダと下軸受を含み、前記下軸受の外輪は、前記下軸受ホルダに接続され、前記第1の締結具は、前記下軸受ホルダを前記関節ハウジングに固定し、前記第2の締結具は、前記減速アセンブリを前記関節ハウジングに固定し、
ここで、前記減速アセンブリは、入力軸と、前記入力軸に接続された波発生器と、前記波発生器を取り囲むように嵌着されたフレキシブルホイールと、前記フレキシブルホイールを取り囲むように嵌着された剛性ホイールと、外軸受とを含み、
前記フレキシブルホイールは、筒状噛合部と、前記筒状噛合部の一端に湾曲するように接続された環状折り返し部とを含み、前記環状折り返し部は、前記筒状噛合部の外側に延び、前記筒状噛合部は、前記剛性ホイールと部分的に噛合し、前記第4の締結具は、前記環状折り返し部を前記外軸受の外輪に固定し、前記第4の締結具の前記環状折り返し部から突出した部分は、前記下軸受ホルダの逃げ穴内に位置し、前記剛性ホイールは、前記外軸受の内輪に接続されている。
【0005】
また、本願の実施形態によるロボットアームは、上記の実施形態に記載の関節モジュールを備える。
【発明の効果】
【0006】
本願が提供する関節モジュールにおいて、駆動アセンブリの出力軸と減速アセンブリの入力軸は単独の構造体であり、両者は締結具を介して取り外し可能に接続されている。これにより、駆動アセンブリと減速アセンブリは組み立てる前にそれぞれ関連する性能試験を行うことができるだけでなく、後期のメンテナンスにも有利であると同時に、減速アセンブリの振動と騒音の低減にも有利である。
【図面の簡単な説明】
【0007】
本願の実施形態における技術的態様をより明確に説明するために、以下では、実施形態の説明において使用する必要がある図面を簡単に説明する。明らかに、以下の説明における図面は本願の幾つかの実施形態にすぎず、当業者にとって、創造的な労働を払わずに、これらの図面に基づいて他の図面を得ることができる。
【0008】
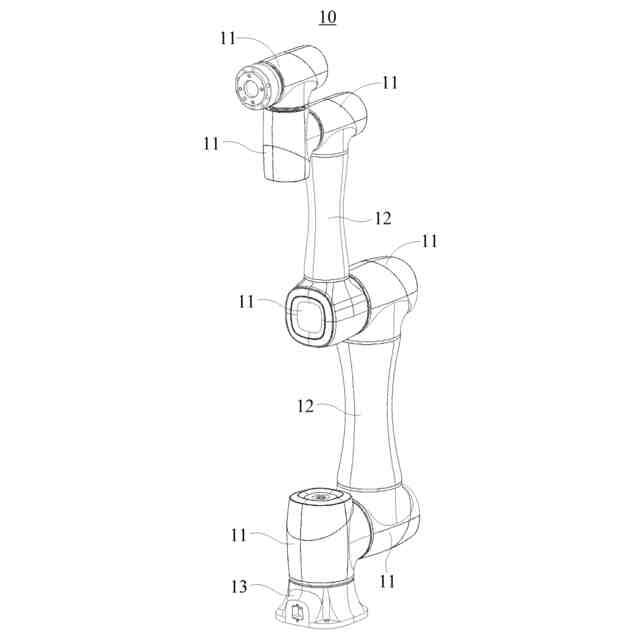
本願に提供されるロボットアームの一実施例の構成図である。
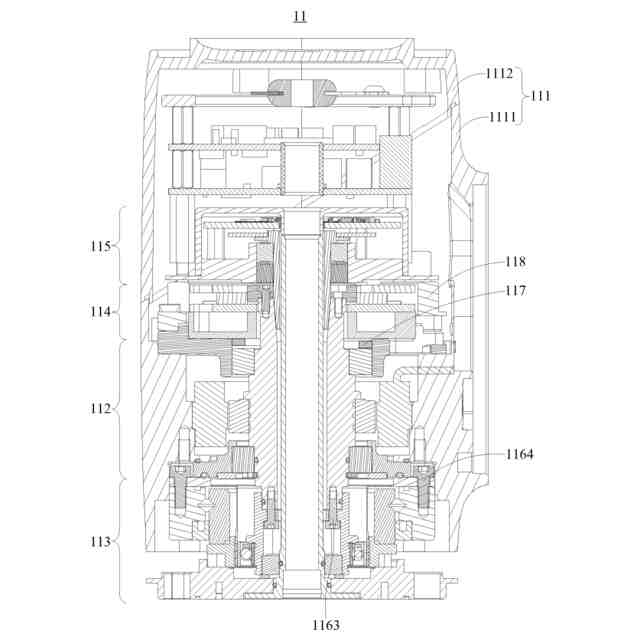
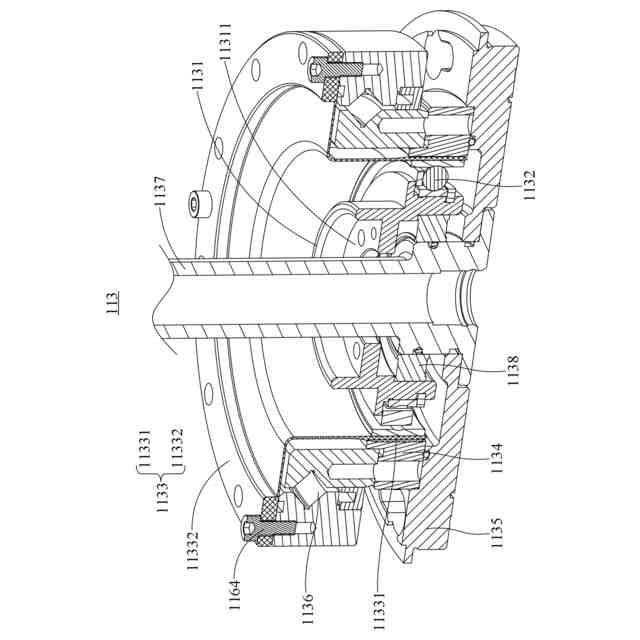
本願に提供される関節モジュールの一実施例の断面構造の概略図である。
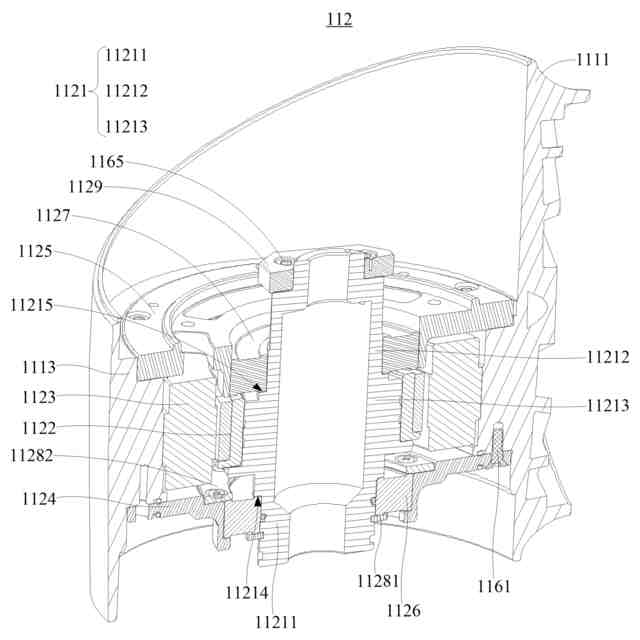
本願に提供される駆動アセンブリ及び関節ハウジングの一実施例の断面構造の概略図である。
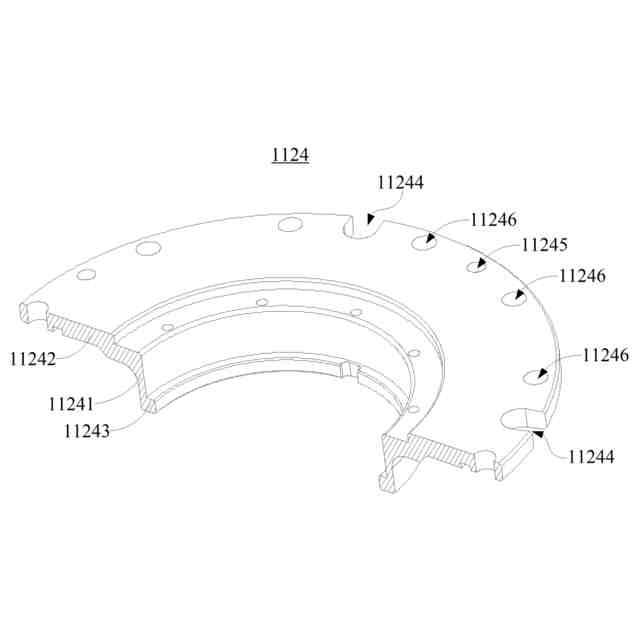
本願に提供される下軸受ホルダの一実施例の断面構造の概略図である。
本願に提供される上軸受ホルダの一実施例の断面構造の概略図である。
本願に提供される減速アセンブリの一実施例の断面構造の概略図である。
本願に提供される制動アセンブリの一実例の分解構造の概略図である。
本願に提供される制動アセンブリ及びエンコードアセンブリの一実施例の断面構造の概略図である。
本願に提供される摩擦シートの一実施例の平面構造の概略図である。
本願に提供されるアダプタの一実施例の平面構造の概略図である。
本願に提供されるアダプタの一実施例の断面構造の概略図である。
本願に提供されるブラケットの一実施例の断面構造の概略図である。
本願に提供される関節モジュールの一実施例の断面構造の概略図である。
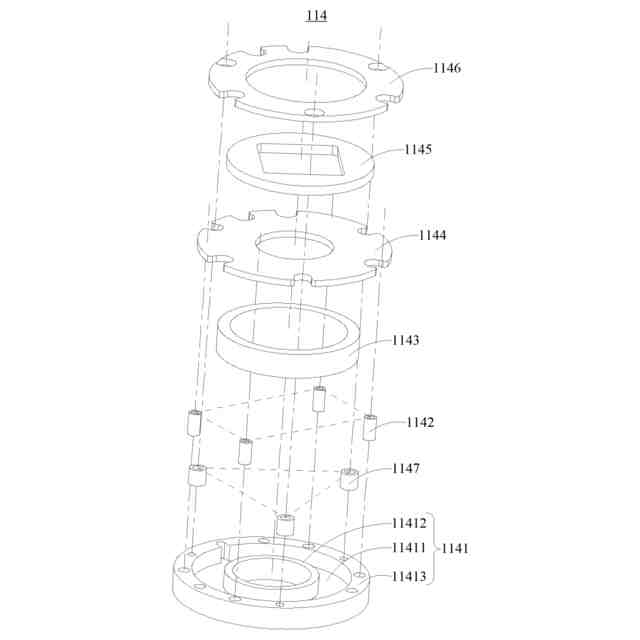
本願に提供されるエンコードアセンブリの一実施例の分解構造の概略図である。
(a)は本願に提供される回転軸と出力軸との接続に関する様々な実施例の構成図であり、(b)は本願に提供される回転軸と出力軸との接続に関する様々な実施例の構成図である。
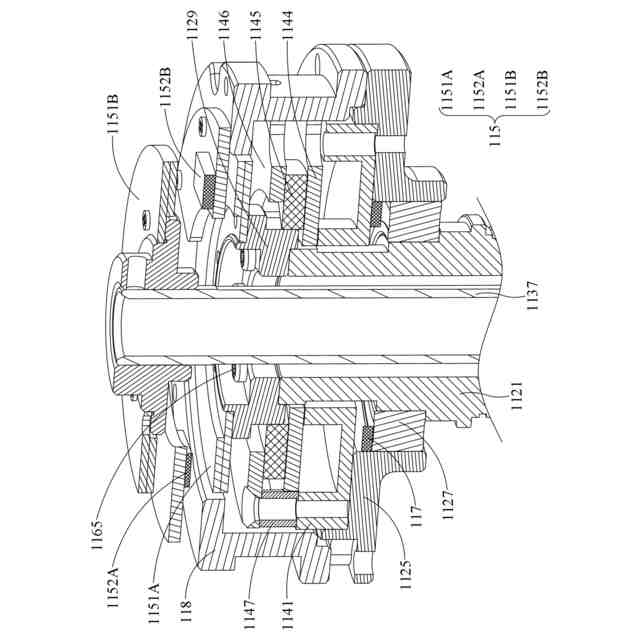
本願に提供されるエンコードアセンブリの一実施例の断面構造の概略図である。
本願に提供されるアダプタの一実施例の断面構造の概略図である。
本願に提供されるエンコードアセンブリの一実施例の断面構造の概略図である。
【発明を実施するための形態】
【0009】
以下、添付図面及び実施形態を参照しながら、本願についてさらに詳細に説明する。特に、以下の実施形態は本願を説明するためにのみ用いられるが、本願の範囲を限定するものではない。同様に、以下の実施形態は、すべての実施形態ではなく、本願の一部の実施形態に過ぎない。当業者が創造的な労働を行わずに取得した他のすべての実施例は、いずれも本願の保護範囲に属する。
【0010】
本明細書で言及される「実施形態」は、実施例に関連して説明された特定の特徴、構造、又は特性が、本願の少なくとも1つの実施形態に含まれることができることを意味する。当業者は、本願に記載された実施形態を他の実施形態と組み合わせてもよいことを明示的かつ暗黙的に理解している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
1か月前
個人
関節モジュール
19日前
個人
寸切りボルト回し
15日前
個人
スロットルトリガー
29日前
個人
ねじ締め装置
9か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
4か月前
コクヨ株式会社
補助器具
9日前
太陽工業株式会社
チャック装置
2日前
株式会社ツノダ
挟持工具
5か月前
株式会社ツノダ
挟持工具
7か月前
川崎重工業株式会社
ハンド
7か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
衝撃工具
2か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
個人
ロボットシステム
9か月前
個人
メンテナンス用スタンド
2か月前
学校法人立命館
ロボットハンド
6か月前
学校法人立命館
グリッパ
22日前
オムロン株式会社
電動把持工具
8日前
株式会社不二越
ロボット
9か月前
トヨタ自動車株式会社
関節機構
9か月前
CKD株式会社
把持装置
29日前
株式会社マキタ
動力工具
3か月前
東京計器株式会社
接触検知装置
1か月前
トヨタ自動車株式会社
ロボット
1か月前
川崎重工業株式会社
罫書用治具
3か月前
トヨタ自動車株式会社
関節機構
9か月前
学校法人立命館
グリッパ
6か月前
トヨタ自動車株式会社
ハンド構造
3か月前
個人
回転工具およびバリ取り部品
1か月前
白山工業株式会社
ロボットアーム
26日前
株式会社ダイヘン
搬送装置
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































