TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024042317
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022146948
出願日
2022-09-15
発明の名称
運転支援装置、運転支援方法、及び運転支援プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20240321BHJP(信号)
要約
【課題】運転者にとって不要な加速抑制を低減して、運転者の不快感を低減可能な加速抑制装置を提供する。
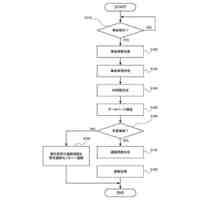
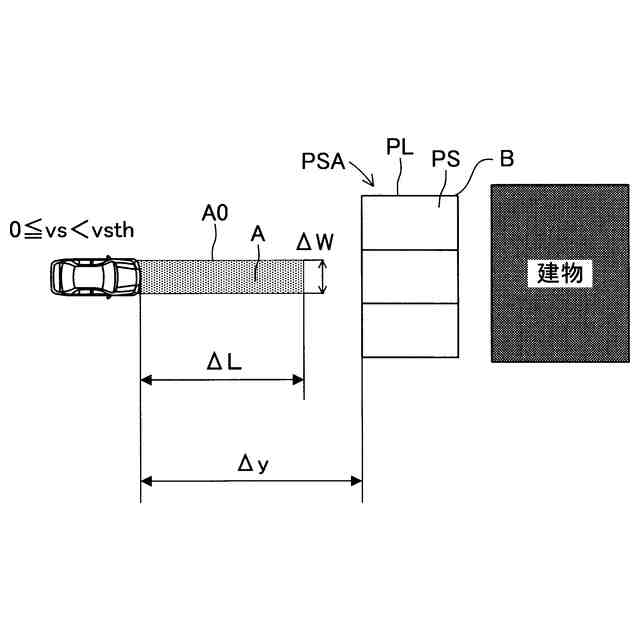
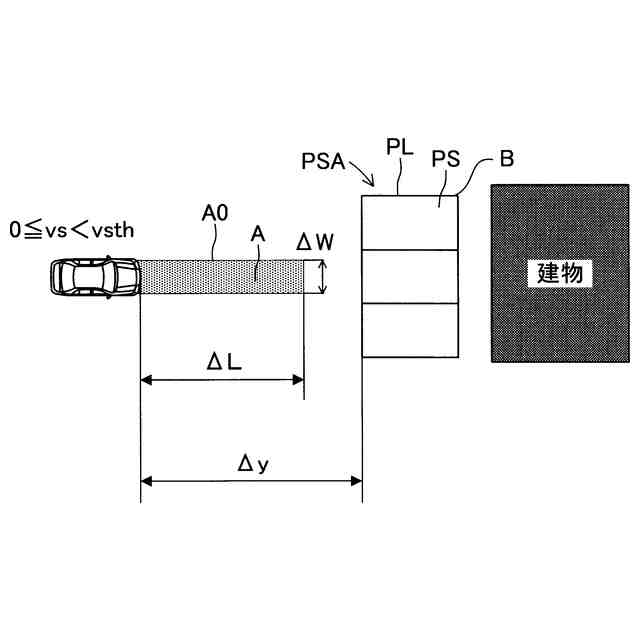
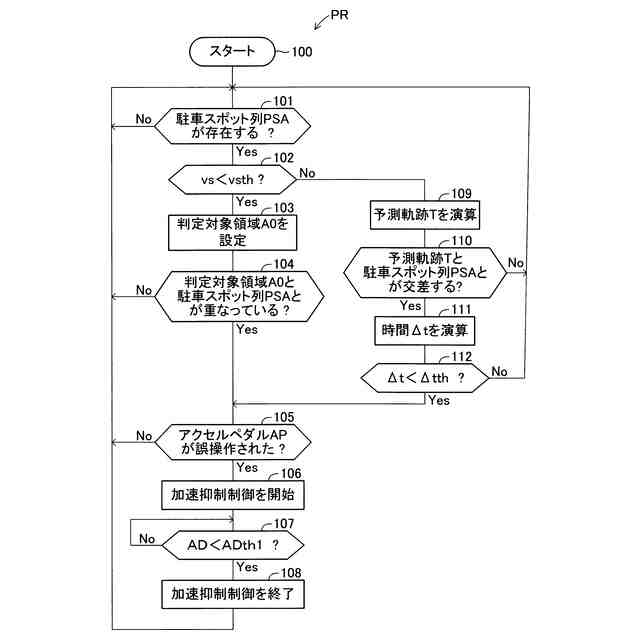
【解決手段】運転支援装置は、自車両が駐車スポット列PSAを含む駐車エリア内に位置すると判定し、且つアクセルペダルが誤って踏み込み操作されたと判定した場合に、自車両の加速を抑制する加速抑制機能を有する制御装置を備える。前記制御装置は、自車両の速度vsが所定の速度以上であるとき、自車両の軌跡を予測し、当該軌跡と駐車スポット列PSAとが交差する地点に自車両が到達するまでに要する時間を予測し、予測時間が所定の時間以下である場合に、自車両が駐車エリア内に位置すると判定し、自車両の速度vsが前記所定の速度未満又は自車両が停止しているとき、自車両の舵角に応じて定められる判定対象領域A0と前記駐車スポット列PSAとが重なる場合に、自車両が前記駐車エリア内に位置すると判定する。
【選択図】図2A
特許請求の範囲
【請求項1】
自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作センサと、
自車両の走行状態に関する情報である車両情報を取得する車両センサと、
自車両の周辺に存在する物標に関する情報である周辺情報を取得する周辺センサと、
前記周辺情報に基づいて複数の駐車スポットが並列配置された駐車スポット列を含む駐車エリア内に自車両が位置しているか否かを判定する駐車エリア判定機能と、前記操作情報に基づいて、自車両のアクセルペダルが誤って踏み込み操作されたか否かを判定する誤操作判定機能と、を有し、さらに、自車両が前記駐車エリア内に位置すると判定し、且つ前記アクセルペダルが誤って踏み込み操作されたと判定した場合に、自車両の加速を抑制する加速抑制機能を有する制御装置と、
を備えた運転支援装置であって、
前記制御装置は、
自車両の速度が所定の速度以上であるとき、自車両が進行した場合の自車両の軌跡を予測し、さらに、当該軌跡と前記駐車スポット列とが交差する地点に自車両が到達するまでに要する時間を予測し、前記予測した時間が所定の時間以下である場合に、自車両が前記駐車エリア内に位置すると判定し、
前記自車両の速度が前記所定の速度未満であるとき又は自車両が停止しているとき、自車両から自車両の進行可能方向へ延びる所定長の領域であって、自車両の舵角に応じて定められる判定対象領域と前記駐車スポット列とが重なる場合に、自車両が前記駐車エリア内に位置すると判定する、
ように構成された、運転支援装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記判定対象領域は、自車両の現在の舵角が保持された状態で自車両が前進した場合に自車両が通過する領域である、運転支援装置。
【請求項3】
自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作情報取得ステップと、
自車両の走行状態に関する情報である車両情報を取得する車両情報取得ステップと、
自車両の周辺に存在する物標に関する情報である周辺情報を取得する周辺情報取得ステップと、
前記周辺情報に基づいて複数の駐車スポットが並列配置された駐車スポット列を含む駐車エリア内に自車両が位置しているか否かを判定する駐車エリア判定ステップと、前記操作情報に基づいて、自車両のアクセルペダルが誤って踏み込み操作されたか否かを判定する誤操作判定ステップと、を有し、さらに、自車両が前記駐車エリア内に位置すると判定し、且つ前記アクセルペダルが誤って踏み込み操作されたと判定した場合に、自車両の加速を抑制する加速抑制ステップを含む制御ステップと、
を含む運転支援方法であって、
前記制御ステップは、
自車両の速度が所定の速度以上であるとき、自車両が進行した場合の自車両の軌跡を予測し、さらに、当該軌跡と前記駐車スポット列とが交差する地点に自車両が到達するまでに要する時間を予測し、前記予測した時間が所定の時間以下である場合に、自車両が前記駐車エリア内に位置すると判定するステップと、
前記自車両の速度が前記所定の速度未満であるとき又は自車両が停止しているとき、自車両から延びる所定の領域であって、自車両の舵角に応じて定められる判定対象領域と前記駐車スポット列とが重なる場合に、自車両が前記駐車エリア内に位置すると判定するステップと、
を含むように構成された、運転支援方法。
【請求項4】
自車両が備えるコンピュータに、
自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作情報取得ステップと、
自車両の走行状態に関する情報である車両情報を取得する車両情報取得ステップと、
自車両の周辺に存在する物標に関する情報である周辺情報を取得する周辺情報取得ステップと、
前記周辺情報に基づいて複数の駐車スポットが並列配置された駐車スポット列を含む駐車エリア内に自車両が位置しているか否かを判定する駐車エリア判定ステップと、前記操作情報に基づいて、自車両のアクセルペダルが誤って踏み込み操作されたか否かを判定する誤操作判定ステップと、を有し、さらに、自車両が前記駐車エリア内に位置すると判定し、且つ前記アクセルペダルが誤って踏み込み操作されたと判定した場合に、自車両の加速を抑制する加速抑制ステップを含む制御ステップと、
を実行させる運転支援プログラムであって、
前記制御ステップは、
自車両の速度が所定の速度以上であるとき、自車両が進行した場合の自車両の軌跡を予測し、さらに、当該軌跡と前記駐車スポット列とが交差する地点に自車両が到達するまでに要する時間を予測し、前記予測した時間が所定の時間以下である場合に、自車両が前記駐車エリア内に位置すると判定するステップと、
前記自車両の速度が前記所定の速度未満であるとき又は自車両が停止しているとき、自車両から延びる所定の領域であって、自車両の舵角に応じて定められる判定対象領域と前記駐車スポット列とが重なる場合に、自車両が前記駐車エリア内に位置すると判定するステップと、
を含むように構成された、運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転者がアクセルペダルを誤って踏み込んだ可能性が高い場合に自車両の加速を抑制する運転支援装置、運転支援方法及び運転支援プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
運転者がアクセルペダルを誤って踏み込んだ可能性が高い場合に自車両の加速を抑制する加速抑制機能を備えた運転支援装置が提案されている(例えば、下記特許文献を参照。)。特許文献1の運転支援装置(以下、「従来装置」と称呼する。)は、例えば、アクセルペダルの踏み込み深さの増大率(単位時間当たりの増大量)が閾値を超える場合、運転者が誤ってアクセルペダルを踏み込んだと判定する。この場合、従来装置は、加速抑制制御を実行し、自車両が加速しないように自車両の駆動装置、制動装置などを制御する。
【先行技術文献】
【特許文献】
【0003】
特開2021-49981号公報
【発明の概要】
【0004】
例えば、駐車スポットが並列配置されている駐車スポット列を含む駐車エリア内にて、運転者が、1つの駐車スポットに自車両を駐車させる運転操作を実行している際に誤ってアクセルペダルを深く踏み込んでしまったときに、加速抑制機能により自車両の加速が抑制される場合には、自車両の安全性が高められる。一方、例えば、先行車両を追い越すために、運転者が意図的にアクセルペダルを踏み込んだ際に、加速抑制機能により自車両の加速が抑制される場合には、運転者が当該加速抑制を煩わしく感じる場合がある。
【0005】
本発明の目的の一つは、運転者にとって不要な加速抑制を低減して、運転者の不快感を低減可能な加速抑制装置を提供することである。
【0006】
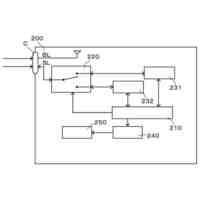
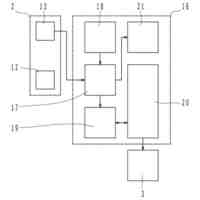
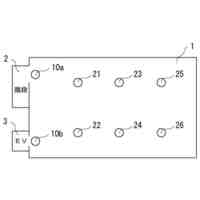
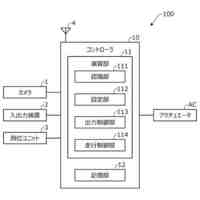
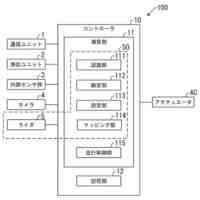
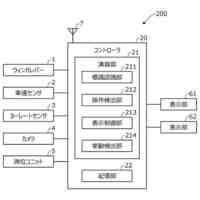
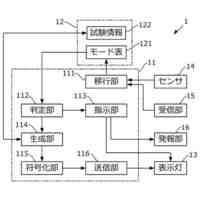
上記の目的を達成するために、本発明の運転支援装置(1)は、
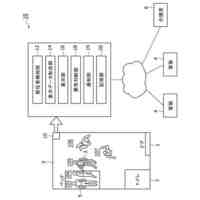
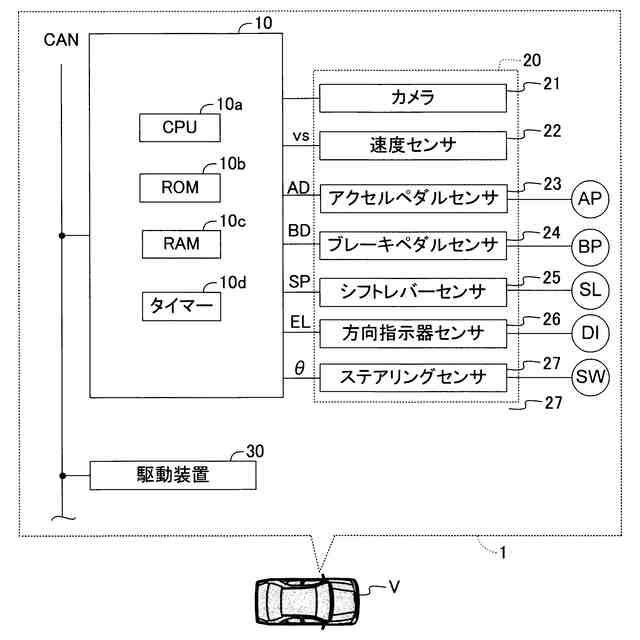
自車両(V)が備える運転操作装置(AP、BP、SL、DI、SW)の操作に関する情報である操作情報(AD、BD、DR,SP,θ)を取得する操作センサ(23、24、25、26、27)と、自車両の走行状態に関する情報である車両情報(vs)を取得する車両センサ(22)と、自車両の周辺に存在する物標に関する情報である周辺情報を取得する周辺センサ(21)と、制御装置とを有する。制御装置は、前記周辺情報に基づいて複数の駐車スポット(PS)が並列配置された駐車スポット列(PSA)を含む駐車エリア(PA)内に自車両が位置しているか否かを判定する駐車エリア判定機能と、前記操作情報に基づいて、自車両のアクセルペダル(AP)が誤って踏み込み操作されたか否かを判定する誤操作判定機能と、を有し、さらに、自車両が前記駐車エリア内に位置すると判定し、且つ前記アクセルペダルが誤って踏み込み操作されたと判定した場合に、自車両の加速を抑制する加速抑制機能を有する。
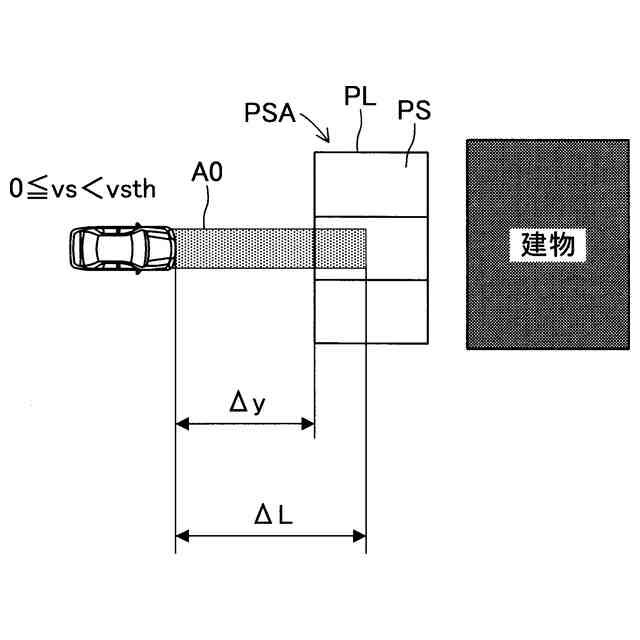
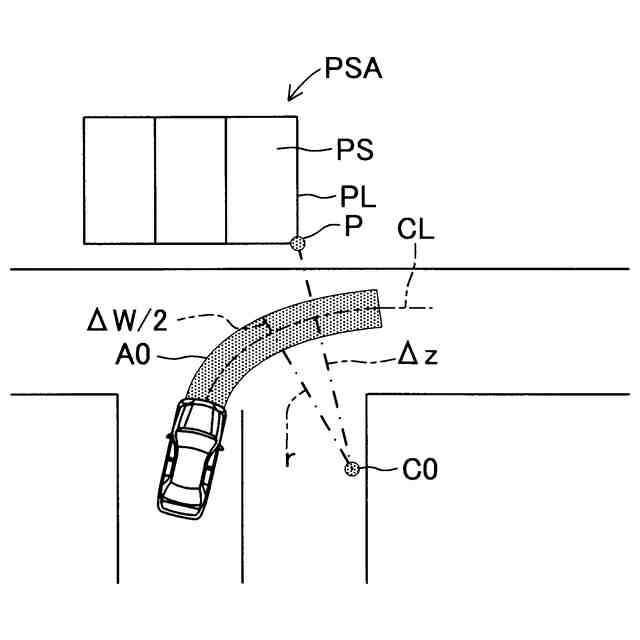
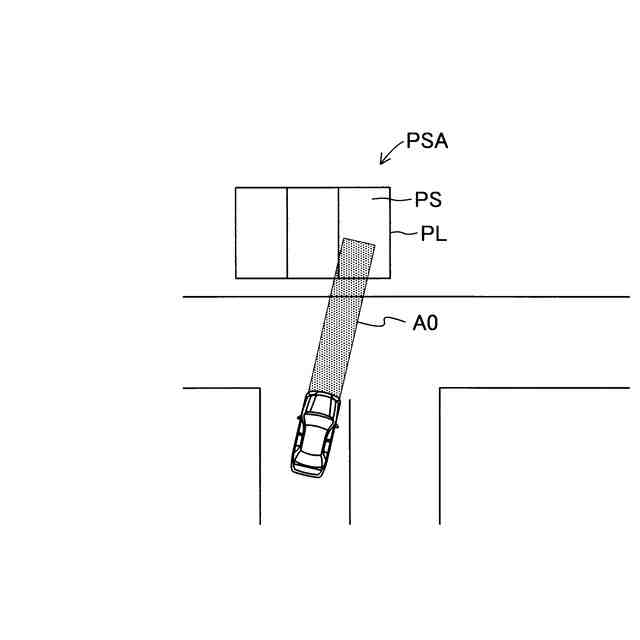
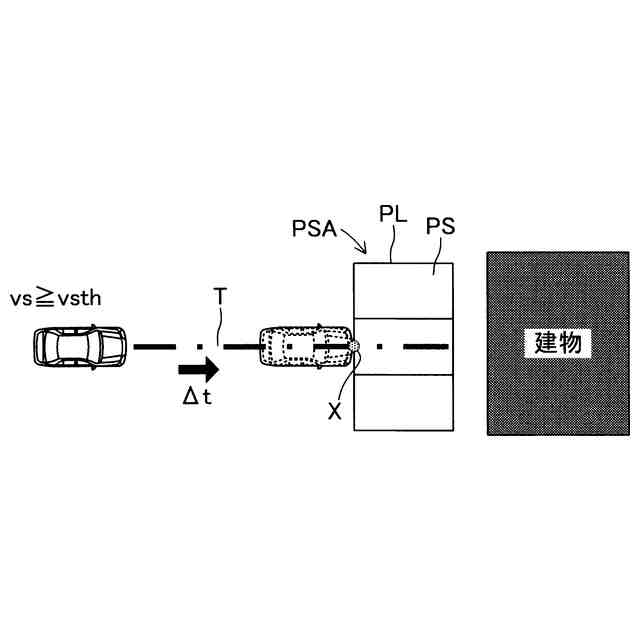
前記制御装置は、自車両の速度(vs)が所定の速度(vsth)以上であるとき、自車両が進行した場合の自車両の軌跡(T)を予測し、さらに、当該軌跡と前記駐車スポット列とが交差する地点(X)に自車両が到達するまでに要する時間(Δt)を予測し、前記予測した時間が所定の時間(Δtth)以下である場合に、自車両が前記駐車エリア内に位置すると判定し、前記自車両の速度が前記所定の速度未満であるとき又は自車両が停止しているとき、自車両から自車両の進行可能方向へ延びる所定長の領域であって、自車両の舵角(θ)に応じて定められる判定対象領域(A0)と前記駐車スポット列とが重なる場合に、自車両が前記駐車エリア内に位置すると判定する、ように構成される。ここで、自車両の進行可能方向とは、自車両が前進走行している場合には、自車両の進行方向であり、自車両が停止している場合には、自車両が停止位置から走行した場合に進行する可能性の高い方向である。
【0007】
本発明に係る運転支援装置において、制御装置が加速抑制制御を実行可能な場面が駐車のための運転操作がなされる場面に限定されている。すなわち、制御装置は、自車両が駐車エリア内に位置していると判定すれば、加速抑制制御を実行可能であるが、その他の場合には、自車両の加速を抑制しない。つまり、自車両が駐車エリア外に位置する場合、アクセルペダルの踏み込み操作通りに自車両の加速が制御される。具体的には、制御装置は、例えば自車両の速度が所定の速度未満の低速走行中又は停止中に、自車両の前端から進行可能方向へ延びる判定対象領域を設定し、当該判定対象領域と駐車スポット列とが重なる場合に、自車両が駐車エリア内に位置すると判定する。したがって、自車両の進行可能方向と駐車スポット列が位置する方向とが異なっている場合には、判定対象領域と駐車スポット列とが重ならない。これにより、駐車のための運転操作がなされる状況ではないと推定され、自車両の加速が許容される(抑制されない)。よって、本発明によれば、運転者にとって不要な加速抑制を低減して、運転者の不快感を低減できる。
【0008】
本発明の一態様に係る運転支援装置において、前記判定対象領域は自車両の現在の舵角が保持された状態で自車両が前進した場合に自車両が通過する領域である。
【0009】
これによれば、制御装置が、比較的簡単に判定対象領域を定めることができる。
【0010】
また、本発明に係る運転支援方法及び運転支援プログラムは、上記の運転支援装置を構成する各装置が実行するステップを含む。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
はしごの道路標示
1か月前
個人
非常放送システム
4日前
個人
飛行体衝突回避装置
1か月前
個人
バス送迎支援システム
24日前
個人
自動操舵制御システム
1か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用計器装置
1か月前
株式会社SUBARU
車両
1か月前
株式会社知財事業研究所
信号機
1か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
表示灯
20日前
能美防災株式会社
警報器
1か月前
個人
配車システム
1か月前
個人
配車システム
1か月前
株式会社アガタ
閉空間監視装置
21日前
ニッタン株式会社
感度試験装置
20日前
トヨタ自動車株式会社
情報収集システム
14日前
ニッタン株式会社
表示灯付発信機
1か月前
株式会社大林組
異常検知システム
1か月前
株式会社京三製作所
車両検出装置
5日前
ホーチキ株式会社
煙感知器
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
27日前
本田技研工業株式会社
運転支援装置
1か月前
トヨタ自動車株式会社
運転支援装置
18日前
ユニット株式会社
人感センサー音声警報器
20日前
本田技研工業株式会社
外界認識装置
1か月前
井関農機株式会社
トラクタの制御システム
1か月前
本田技研工業株式会社
車両表示装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
27日前
日本信号株式会社
路上車両検知装置
1か月前
中国電力株式会社
遠隔見守りシステム
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
大和ハウス工業株式会社
見守りシステム
19日前
能美防災株式会社
感知器
20日前
株式会社アサヒ電子研究所
居住者監視システム
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ