TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159079
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2025132817,2024021558
出願日
2025-08-07,2019-12-03
発明の名称
ロボット用充電ステーション
出願人
GROOVE X株式会社
代理人
主分類
H02J
7/00 20060101AFI20251009BHJP(電力の発電,変換,配電)
要約
【課題】
充電ステーションにおいてロボットとの接続容易性を高める。
【解決手段】
充電ステーション500は、車輪が乗り上げる上面を有するベース504と、ロボット100の充電端子に接続する給電端子と、を備える。ベース504の上面は、奥側領域に目標位置が設定される一方、入口側の特定位置と目標位置とをつなぐ基準進入ラインが設定され、進入してくる車輪に対して基準進入ライン側への重力成分をもたせる三次元曲面形状の傾斜面を含む。給電端子は、車輪が目標位置に到達した状態で充電端子に接続される。
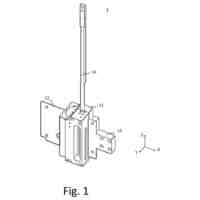
【選択図】図1
特許請求の範囲
【請求項1】
車輪で走行するロボットの充電を行うための充電ステーションであって、
前記車輪が乗り上げる上面を有するベースと、
ロボットの充電端子に接続する給電端子と、
を備え、
前記ベースの上面は、
奥側領域に目標位置が設定される一方、入口側の特定位置と前記目標位置とをつなぐ基準進入ラインが設定され、
進入してくる車輪に対して前記基準進入ライン側への重力成分をもたせる三次元曲面形状の傾斜面を含み、
前記給電端子は、前記車輪が前記目標位置に到達した状態で前記充電端子に接続されることを特徴とする充電ステーション。
続きを表示(約 1,000 文字)
【請求項2】
前記ベースの上面は、前記基準進入ラインの両サイドに前記基準進入ラインに向けて低位となるよう傾斜する三次元曲面形状を含むことを特徴とする請求項1に記載の充電ステーション。
【請求項3】
前記基準進入ラインは、前記特定位置から前記目標位置に向けて上り傾斜と下り傾斜とを連続的に有し、
前記上り傾斜のほうが前記下り傾斜よりも勾配が緩やかであることを特徴とする請求項2に記載の充電ステーション。
【請求項4】
前記ベースの上面は、前記上り傾斜の奥行範囲において、前記両サイドの左右の勾配が奥行方向に向けて大きくなる形状を含むことを特徴とする請求項3に記載の充電ステーション。
【請求項5】
前記ベースの奥側領域に、前記目標位置を含む車輪受が設けられ、
前記車輪受は、前記車輪を受け入れた状態で前記充電端子と前記給電端子との間に接触圧が作用するよう位置決めされていることを特徴とする請求項1~4のいずれかに記載の充電ステーション。
【請求項6】
前記給電端子は、前記充電端子に合わせて変位可能となるよう前記ベースに支持されていることを特徴とする請求項5に記載の充電ステーション。
【請求項7】
前記給電端子と前記充電端子とが、マグネットにより着脱可能に接続されることを特徴とする請求項6に記載の充電ステーション。
【請求項8】
前記給電端子を相対変位可能に支持する端子ユニットを備え、
前記端子ユニットは、前記充電端子が前記給電端子に接続するときに受ける付勢力により、前記給電端子が前記充電端子に対して摺動することを許容することを特徴とする請求項1~7のいずれかに記載の充電ステーション。
【請求項9】
前記端子ユニットは、
前記ベースにおける入口側へ向けて延びる本体と、
前記本体の軸線周りに回転可能に支持される一方、その軸線の周囲に前記給電端子を支持する端子支持部と、
を含むことを特徴とする請求項8に記載の充電ステーション。
【請求項10】
前記給電端子が複数の端子を含み、
各端子が前記軸線の周囲に配置されていることを特徴とする請求項9に記載の充電ステーション。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの充電を行うための充電ステーションに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ヒューマノイドロボットやペットロボット等、人間との対話や癒しを提供する自律行動型ロボットの開発が進められている(特許文献1参照)。このようなロボットとして、周囲の状況に基づいて自律的に学習することで行動を進化させ、生命を感じさせるものも出現しつつある(特許文献2参照)。
【0003】
このようなロボットも電気エネルギーで動作する以上、充電が必要となる。このため、ロボットを充電ステーションと通信可能とし、充電残量が基準値以下となったときにそのステーションへ誘導し、自律的に充電させる技術も提案されている(特許文献3参照)。
【先行技術文献】
【特許文献】
【0004】
特開2000-323219号公報
国際公開第2017/169826号
特開2001-125641号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ロボットをステーションの設定位置に正確な角度で進入させなければ、互いの端子を接続できない。特にロボットが車輪駆動のものである場合、ステーションに近づいたときに何度も切り替えしが必要になるなど、ロボットの精密な移動制御が必要となる。このため、処理負荷が大きくなるうえ時間もかかるといった問題があった。
【0006】
本発明は上記課題認識に基づいてなされた発明であり、その主たる目的は、充電ステーションにおいてロボットとの接続容易性を高めることにある。
【課題を解決するための手段】
【0007】
本発明のある態様は、車輪で走行するロボットの充電を行うための充電ステーションである。この充電ステーションは、車輪が乗り上げる上面を有するベースと、ロボットの充電端子に接続する給電端子と、を備える。ベースの上面は、奥側領域に目標位置が設定される一方、入口側の特定位置と目標位置とをつなぐ基準進入ラインが設定され、進入してくる車輪に対して基準進入ライン側への重力成分をもたせる三次元曲面形状の傾斜面を含む。給電端子は、車輪が目標位置に到達した状態で充電端子に接続される。
【発明の効果】
【0008】
本発明の充電ステーションによれば、ロボットの接続容易性を高めることができる。
【図面の簡単な説明】
【0009】
上述した目的、およびその他の目的、特徴および利点は、以下に述べる好適な実施の形態、およびそれに付随する以下の図面によってさらに明らかになる。
【0010】
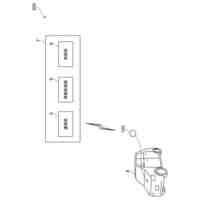
ロボット用充電システムの概要を説明するための図である。
ロボットの外観を表す正面図である。
ロボットの外観を表す側面図である。
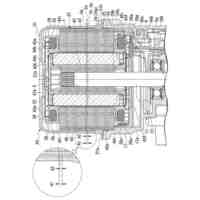
ロボットの構造を概略的に表す断面図である。
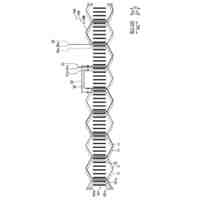
車輪収納機構の構造および動作を模式的に示す側面図である。
車輪収納機構の構造および動作を模式的に示す正面図である。
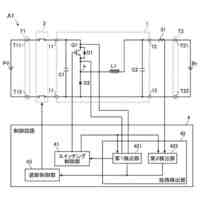
ロボットのハードウェア構成図である。
ロボットシステムの機能ブロック図である。
ロボットシステムの機能ブロック図である。
ロボットが外皮を装着した状態を表す右側面図である。
ロボットが外皮を装着した状態を表す正面図である。
ロボットが外皮を装着した状態を表す背面図である。
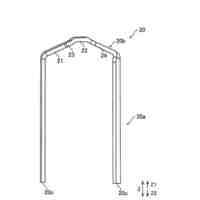
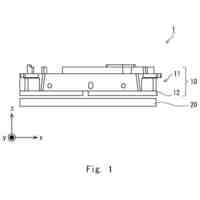
ステーションの外観を表す斜視図である。
充電ユニットの外観を表す斜視図である。
充電ユニットの外観を表す正面図である。
ベースの上面の形状を表す説明図(斜視図)である。
ベースの上面の形状を表す説明図(正面図)である。
ベースの上面の形状を表す説明図(平面図)である。
ベースの上面の形状を表す説明図(図11BのX-X矢視断面図)である。
ベースの上面の形状を表す説明図(図12AのA-A矢視断面)である。
ベースの上面の形状を表す説明図(図12AのB-B矢視断面)である。
ベースの上面の形状を表す説明図(図12AのC-C矢視断面)である。
ベースの上面の形状を表す説明図(図12AのD-D矢視断面)である。
ベースの上面の形状を表す説明図(図12AのE-E矢視断面)である。
ベースの上面の形状を表す説明図(図12AのF-F矢視断面)である。
ベースの上面の形状を表す説明図(図12AのG-G矢視断面)である。
ベースの上面の形状を表す説明図(図12AのH-H矢視断面)である。
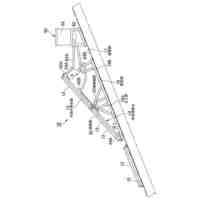
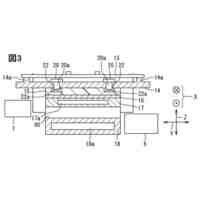
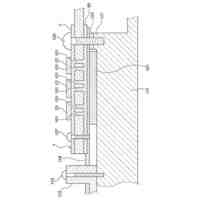
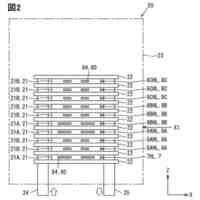
給電端子を含む端子ユニットおよびその周辺構造を表す図である。
給電端子を含む端子ユニットの先端部を示す正面図である。
給電端子を含む端子ユニットの先端部を示す側面図である。
ベースにおける端子ユニットの支持構造を表す模式図のうち、端子ユニットの待機状態(無負荷状態)を示す図である。
ベースにおける端子ユニットの支持構造を表す模式図のうち、ロボットが端子ユニットに接続されるときに生じ得る状態(負荷状態)を示す図である。
ベースにおける端子ユニットの支持構造を表す模式図のうち、ロボットが端子ユニットに接続されるときに生じ得る状態(負荷状態)を示す図である。
充電端子と給電端子との接続構造を表す模式図のうち、部分断面図である。
充電端子と給電端子との接続構造を表す模式図のうち、接続過程における端子ユニットの動きを示す図である。
充電端子と給電端子との接続構造を表す模式図のうち、接続過程における端子ユニットの動きを示す図である。
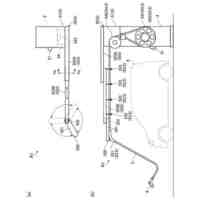
ロボットの進入動作を表す図で、その動作過程を示す図である。
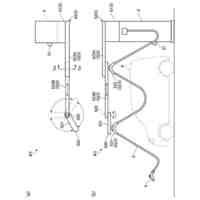
ロボットの進入動作を表す図で、その動作過程を示す図である。
ロボットの進入動作を表す図で、その動作過程を示す図である。
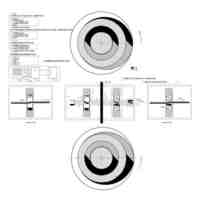
車輪誘導メカニズムを例示する模式図で、車輪誘導過程を平面視する図である。
車輪誘導メカニズムを例示する模式図で、車輪誘導過程を平面視する図である。
車輪誘導メカニズムを例示する模式図で、車輪誘導過程を平面視する図である。
車輪誘導メカニズムを例示する模式図で、車輪誘導過程において後輪が位置する箇所の鉛直断面を示し、図18Aに対応する図である。
車輪誘導メカニズムを例示する模式図で、車輪誘導過程において後輪が位置する箇所の鉛直断面を示し、図18Bに対応する図である。
車輪誘導メカニズムを例示する模式図で、車輪誘導過程において後輪が位置する箇所の鉛直断面を示し、図18Cに対応する図である。
ステーションからロボットが退出するときの動作を表す図で、充電完了時の状態を示す図である。
ステーションからロボットが退出するときの動作を表す図で、端子解除動作を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
GROOVE X株式会社
ロボット用充電ステーション
12日前
個人
単極モータ
15日前
株式会社アイシン
ロータ
15日前
株式会社アイシン
ロータ
19日前
日本精機株式会社
サージ保護回路
22日前
日星電気株式会社
ケーブル組立体
7日前
コーセル株式会社
電源装置
今日
西部電機株式会社
充電装置
22日前
西部電機株式会社
充電装置
22日前
トヨタ自動車株式会社
固定子
20日前
株式会社デンソー
回転機
13日前
トヨタ自動車株式会社
製造装置
20日前
個人
連続ガウス加速器形磁力増幅装置
22日前
株式会社アイシン
ステータ
19日前
株式会社ミツバ
ブラシレスモータ
21日前
カヤバ株式会社
筒型リニアモータ
21日前
東京瓦斯株式会社
通信装置
21日前
株式会社アイシン
ステータ
19日前
株式会社ダイヘン
充電装置
19日前
株式会社ダイヘン
充電装置
19日前
株式会社ダイヘン
充電装置
19日前
株式会社アイシン
ステータ
19日前
株式会社アイシン
ステータ
19日前
個人
太陽エネルギー収集システム
20日前
株式会社ダイヘン
充電装置
19日前
個人
二次電池繰返パルス放電器用印刷基板
5日前
株式会社kaisei
発電システム
15日前
トヨタ自動車株式会社
被膜形成装置
20日前
株式会社デンソー
電力変換装置
6日前
株式会社ダイヘン
電力変換装置
22日前
株式会社ミツバ
回転電機
19日前
株式会社ダイヘン
電力システム
22日前
東京瓦斯株式会社
給電システム
21日前
株式会社ミツバ
回転電機
12日前
ASTI株式会社
電力変換装置
20日前
株式会社デンソー
電力変換装置
14日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ