TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025160054
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2024063046
出願日
2024-04-09
発明の名称
ケーブル組立体
出願人
日星電気株式会社
代理人
主分類
H02G
3/22 20060101AFI20251015BHJP(電力の発電,変換,配電)
要約
【課題】
産業用ロボットのアームなどに使用されるケーブルにおいて、アームの繰り返される複雑な動きに対して耐久性があり、かつ発塵を抑制し、周囲への悪影響を防止できるケーブル組立体を提供することにある。
【解決手段】
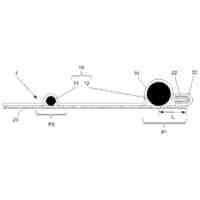
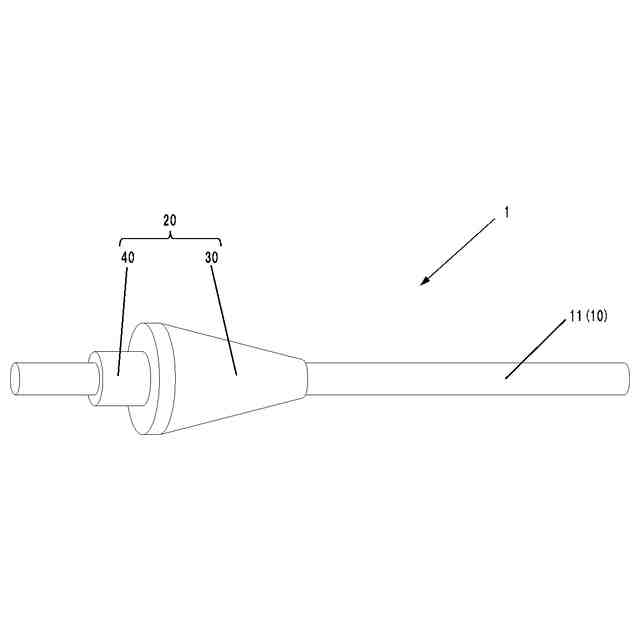
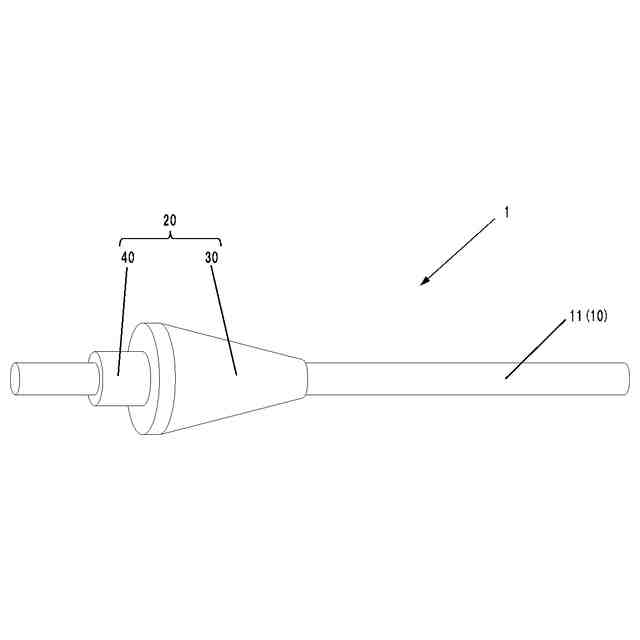
ケーブルのシースに保護部と取付部とを有する接続部を設けたケーブル組立体とする。取付部はケーブル組立体を被接続体に取り付け可能とし、保護部はシースを覆う。保護部はその剛性が基端側から先端側にかけて減少する構造とし、先端側の剛性は基端側の剛性の3~10%とする。
【選択図】 図1
特許請求の範囲
【請求項1】
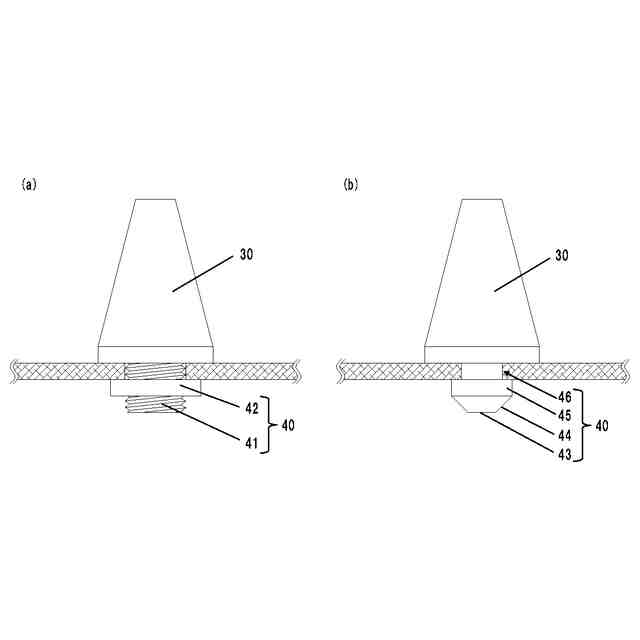
導体もしくは1本以上の電線を被覆するシースを有するケーブルと、該シース上に設けられた接続部とを有するケーブル組立体であって、該接続部は、該ケーブル組立体を取り付け対象に取り付け可能とする取付部と、該シースを覆う保護部を備えることを特徴とするケーブル組立体。
続きを表示(約 670 文字)
【請求項2】
該取付部と該保護部とが一体成型されていることを特徴とする、請求項1に記載のケーブル組立体。
【請求項3】
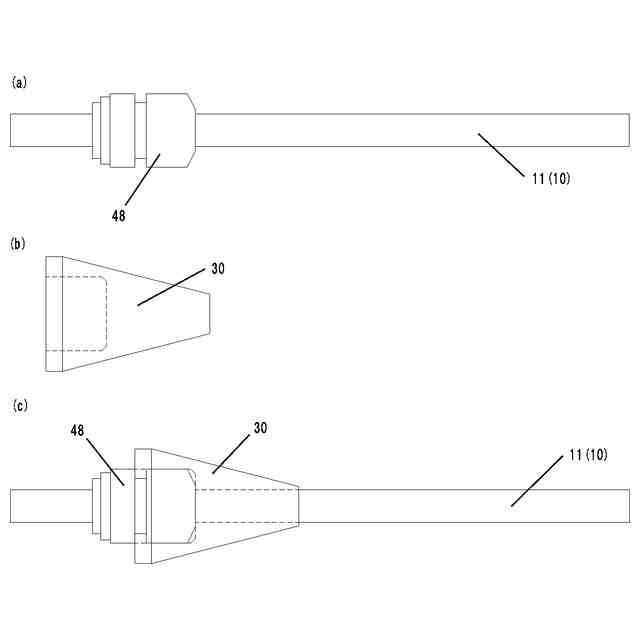
該取付部が、該保護部とは別体の別体取付部であることを特徴とする、請求項1に記載のケーブル組立体。
【請求項4】
該保護部が、該別体取付部の少なくとも一部を収容可能であることを特徴とする、請求項3に記載のケーブル組立体。
【請求項5】
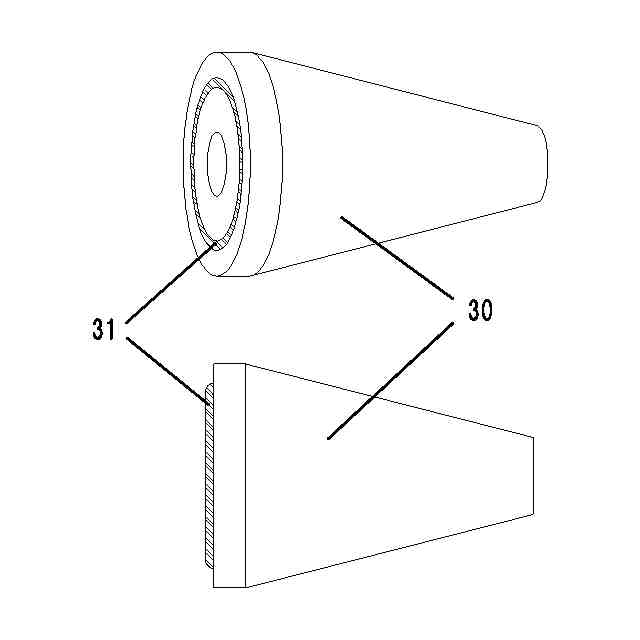
該保護部の剛性が基端側から先端側にかけて減少することを特徴とする、請求項1~4の何れか一項に記載のケーブル組立体。
【請求項6】
該保護部の先端側の剛性は、該保護部の基端側の剛性の3~10%であることを特徴とする、請求項5に記載のケーブル組立体。
【請求項7】
該保護部の長さ方向に直交する面の断面積が基端側から先端側にかけて小さくなることを特徴とする、請求項1~4の何れか一項に記載のケーブル組立体。
【請求項8】
該保護部の先端側の断面積は、該保護部の基端側の断面積の3~10%であることを特徴とする、請求項7に記載のケーブル組立体。
【請求項9】
該保護部の先端側の剛性は、該ケーブルの剛性の10~25%であることを特徴とする、請求項1~4の何れか一項に記載のケーブル組立体。
【請求項10】
該保護部の先端側の剛性は、該ケーブルの剛性の10~25%であることを特徴とする、請求項5に記載のケーブル組立体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボットに好適に使用されるケーブルに関するものである。
続きを表示(約 930 文字)
【背景技術】
【0002】
産業用ロボットは多関節ロボットに代表されるように、複雑な動作を繰り返し行うアームを有する。産業用ロボットのアームの複雑な動きを阻害せず、かつアームの複雑な動きによるケーブルの断線を防ぐために、アームの外側にケーブルが配線されている産業用ロボットが存在する。
【0003】
アームの外側にケーブルが配線されている場合、ケーブルの両端部は固定されているが、ケーブルの中腹部は浮いており固定されていないので、アームが動いた際にはケーブルの中腹部で振れや屈曲が発生する。
【0004】
上述した産業用ロボットのアームの外側にケーブルを配線する場合、ロボットの壁体にケーブルグランドを設け、ケーブルグランドでケーブルを固定する構造が一般的である。
【0005】
そこで、ケーブルを産業用ロボットに取り付けて固定する機能を有する部品と、ケーブルとを組み合わせた構造を有するケーブル組立体が使用されている。
【0006】
例えば、特許文献1では電線束などにグロメットを一体成型した構造が記載されている。
【0007】
また、特許文献2ではグロメットの本体部をケーブルに融着固定し、ガイド部をケーブルに密着させた構造が記載されている。
【0008】
しかしながら、特許文献1に記載の発明ではグロメットにより透孔の辺縁への接触による損傷防止効果が見込めるが、振れや屈曲が繰り返される環境を前提としておらず、耐屈曲性能については課題が残る。
【0009】
特許文献2に記載の発明では、グロメットにガイド部を設けることでケーブルを保護しているが、ガイド部とケーブルは固定されておらず、繰り返される屈曲に対してガイド部とケーブルとの摩擦により粉塵が発生し、周囲への悪影響が懸念される。
【先行技術文献】
【特許文献】
【0010】
実全平1-111417号公報
特開2013-183498号公報
【発明の概要】
【発明が解決しようとする課題】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日星電気株式会社
面状ヒータ
8日前
日星電気株式会社
ケーブル組立体
1か月前
日星電気株式会社
ケーブルアセンブリ
4か月前
個人
単極モータ
1か月前
個人
電気を重力で発電装置
16日前
個人
高圧電気機器の開閉器
3日前
キヤノン電子株式会社
モータ
23日前
キヤノン電子株式会社
モータ
15日前
日星電気株式会社
ケーブル組立体
1か月前
コーセル株式会社
電源装置
24日前
トヨタ自動車株式会社
モータ
15日前
株式会社アイドゥス企画
減反モータ
3日前
株式会社デンソー
回転機
1か月前
株式会社kaisei
発電システム
1か月前
個人
二次電池繰返パルス放電器用印刷基板
29日前
株式会社ミツバ
回転電機
1か月前
株式会社デンソー
電力変換装置
1か月前
株式会社デンソー
電力変換装置
1か月前
トヨタ自動車株式会社
固定子の加熱装置
26日前
矢崎総業株式会社
電源回路
2日前
株式会社デンソー
非接触受電装置
1か月前
株式会社ダイヘン
インバータ装置
1か月前
矢崎総業株式会社
ワイヤーハーネス
1か月前
日産自動車株式会社
ロータシャフト
10日前
日産自動車株式会社
ロータシャフト
10日前
ローム株式会社
モータドライバ回路
10日前
トヨタ自動車株式会社
ステータの製造装置
16日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
10日前
山洋電気株式会社
モータ
29日前
株式会社マキタ
電動作業機
23日前
株式会社アイシン
電力変換装置
15日前
京商株式会社
模型用非接触電力供給システム
3日前
トヨタ自動車株式会社
可変界磁ロータ
18日前
株式会社TMEIC
電力変換装置
1か月前
株式会社デンソー
ステータ及びモータ
1か月前
トヨタ紡織株式会社
ロータの製造装置
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ