TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170725
公報種別
公開特許公報(A)
公開日
2025-11-19
出願番号
2024084391
出願日
2024-05-07
発明の名称
減反モータ
出願人
株式会社アイドゥス企画
代理人
主分類
H02P
21/36 20160101AFI20251112BHJP(電力の発電,変換,配電)
要約
【課題】 サーボモータを、任意の回転位置で停止させ、外力で回転軸が回転した偏移を測定、停止磁力(電流)と偏移角から、外力(張力)を算出、外力の大きさに応じて、サーボモータの速度を換えて、偏移した位置までモータを回転させる事で、任意の張力を維持して、サーボモータ単体で減反制御を行います、通常のブレーキと異なり、送り出し、巻き上げも出来ますので、機械的張力調整機構は必要有りません、ロール材の減反の他、筋トレマシーン、リハビリ機器、釣り竿を必要としないリールをも実現する事が出来ます。
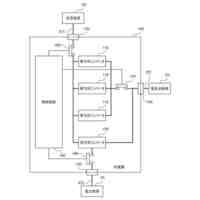
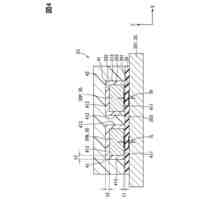
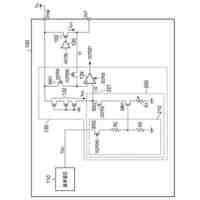
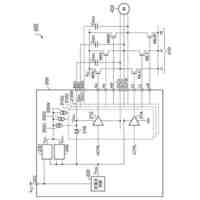
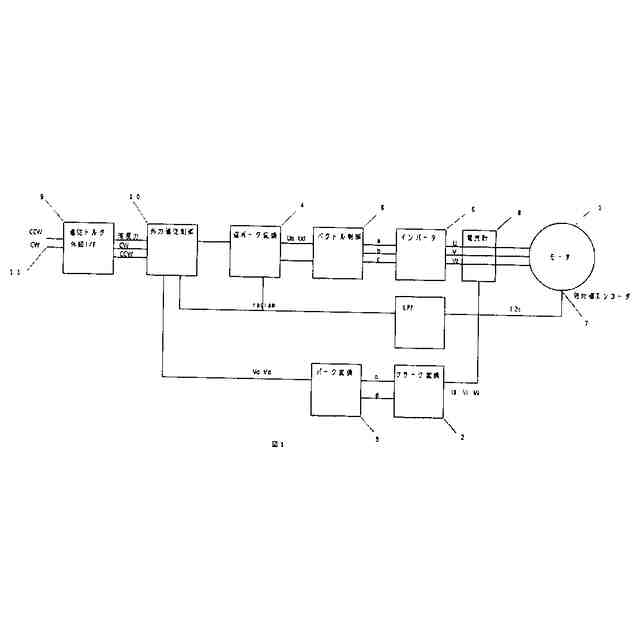
【解決手段】サーボモータモデルの、モータ(1)クラーク変換(2)パーク変換(3)逆パーク変換(4)空間ベクトル制御(5)インバータ(6)絶対値エンコーダ(7)電流センサ(8)に、張力設定(9)外力追従制御(10)外部インターフェイス(11)を追加する事で、外力に追従して回転、停止を制御する事出来ます。
【選択図】図1
特許請求の範囲
【請求項1】
絶対値エンコーダ、電流センサの数値を小型コンピュータに読み込み、外力を緩和する方向に追従して回転する減反モータ。
続きを表示(約 450 文字)
【請求項2】
動作モデルに置いて、電気的角度と回転軸角度、又は、制御電流値と測定電流値をイコールにする、モデルに、追従制御ブロックを有する減反モータ。
【請求項3】
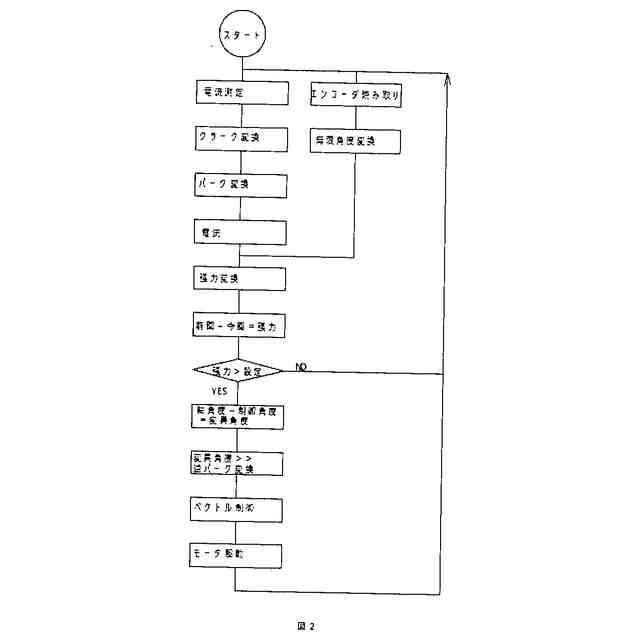
制御フローチャートに置いて、電気的角度と回転軸角度の差、制御電流値と測定電流値を比較して、バランスさせるフローを有する減反モータ。
【請求項4】
動作アルゴリズムに於いて、偏移角度の自動調整、又は負荷電流の自動調整アルゴリズムを追加する事で、停止制御を主とした減反モータ。
【請求項5】
外部信号によって、任意に送り出し、巻き上げが出来る減反モータ。
【請求項6】
減反、送り出し、巻き上げを、モータ単体で実施出来る為、フィッシングリール、筋トレマシーン、リハビリ機器に使用する事で、従来に無い複雑な制御が出来る減反モータ。
【請求項7】
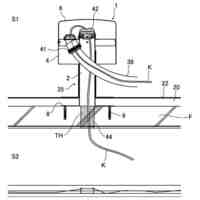
モータと取り行けベース間にスプリングスイッチを併用する事で急激な外力を吸収する事が出来る減反モータ。
発明の詳細な説明
【技術分野】
【0001】
サーボモータに置いて任意の停止磁力を掛け、外力で回転軸が回転した偏移を測定、停止磁力(電流)と偏移角から、外力(張力)を算出、外力の大きさに応じて、サーボモータの速度を換えて、偏移した位置までモータを回転させる事で、任意の張力を維持して、サーボモータ単体で減反動作を行います。
続きを表示(約 1,300 文字)
【技術背景】
【0002】
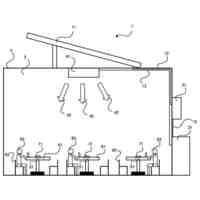
ロール材の減反、筋トレマシーン、リハビリ機器に置いて、単純なブレーキで無く、サーボモータを使用する事で、減反、送り出し、巻き上げが可能で、機械的張力調整機構を省略する事が出来ます。フィッシングリールに於いては、究極的には釣り竿まで省略する事も可能です。
【発明の概要】
【】
【発明が解消しようとする課題】
【0003】
パウダーブレーキに於ける磁粉の漏れ、電磁ブレーキによる発熱、ブレーキ単体では、送り出し、巻き上げを手動で行う必要が有る、従来、サーボモータは、停止制御を目的に作らていない等、停止から回転までの全域を制御出来ませんでしたが、停止制御アルゴリズムが使用する事で、これらの問題を解決する事が出来ました。
【課題を解決する為の手段】
【0004】
サーボモータに於いて、電気的角度に任意の磁力を掛けて、停止させ、回転軸角度を絶対値エンコーダで測定、偏移角の大小でサーボモータの速度を調整し、偏移位置までモータを回転させる事で、ブレーキ装置として動作させます。
【発明の効果】
【0005】
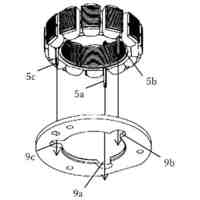
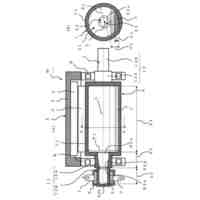
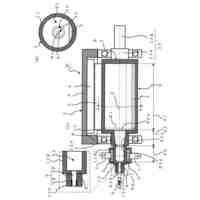
サーボモータをブレーキ装置と使用出来る事で、停止、送り出し、巻き上げを、任意のトルクで行う事が出来ます、外力に追従して動作する為、たるみ吸収機構、トルクリミッタ等の付帯機構が必要無く極めて構造が簡単です。又、主として、回転速度は重要ではない為、ギア内蔵アウターローター雲台モータを使用する事で、小型化が図れます、張力をバランスさせる制御を行う為、リハビリ機器にも応用が出来ます。
【図面の簡単な説明】
【0006】
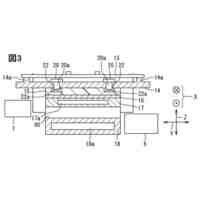
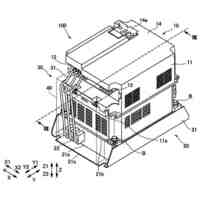
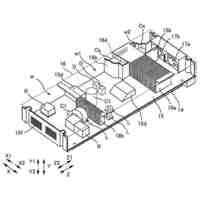
この出願に係る発明の第一の実施の形態を示す構成図である。
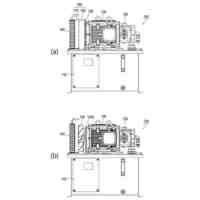
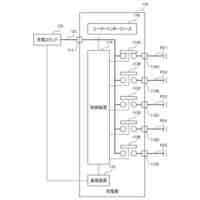
この出願に係る発明の第一の実施の動作を示す構成図である。
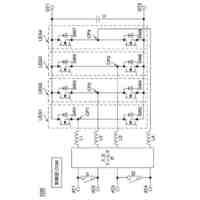
この出願に係る発明の第一の実施の動作を示す構成図である。
【発明を実施するための形態】
【0007】
サーボモータのモデルに於いて、モータ(1)クラーク変換(2)パーク変換(3)逆パーク変換(4)空間ベクトル制御(5)インバータ(6)絶対値エンコーダ(7)電流センサ(8)に、張力設定(9)外力追従制御(10)外部インターフェイス(11)を付加したモデルです。
【符号の説明】
【0008】
1 モータ
2 クラーク変換
3 パーク変換
4 逆パーク変換
5 空間ベクトル制御
6 インバータ
7 絶対値エンコーダ
8 電流センサ
9 調整設定
10 外力追従制御
11 外部インターフェイス
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電気を重力で発電装置
1か月前
個人
高圧電気機器の開閉器
21日前
キヤノン電子株式会社
モータ
1か月前
キヤノン電子株式会社
モータ
1か月前
株式会社東光高岳
充電器
1日前
日星電気株式会社
ケーブル組立体
1か月前
東洋アルミニウム株式会社
発電体
今日
コーセル株式会社
電源装置
1か月前
株式会社アイドゥス企画
減反モータ
21日前
トヨタ自動車株式会社
モータ
1か月前
株式会社デンソー
端子台
14日前
株式会社ダイヘン
充電装置
今日
株式会社デンソー
回転電機
5日前
株式会社ダイヘン
送配電装置
5日前
個人
二次電池繰返パルス放電器用印刷基板
1か月前
本田技研工業株式会社
回転電機
7日前
株式会社デンソー
電力変換装置
1か月前
富士電機株式会社
電力変換装置
5日前
ローム株式会社
半導体集積回路
12日前
株式会社不二越
空冷式油圧装置
5日前
富士電機株式会社
電力変換装置
5日前
矢崎総業株式会社
給電装置
13日前
株式会社東光高岳
充電対象切換システム
1日前
株式会社TMEIC
制御装置
13日前
矢崎総業株式会社
電源回路
20日前
株式会社デンソー
非接触受電装置
1か月前
株式会社日立製作所
回転電機
12日前
トヨタ自動車株式会社
固定子の加熱装置
1か月前
日産自動車株式会社
ロータシャフト
28日前
大和ハウス工業株式会社
敷設用機器
13日前
株式会社イノコンバンク
無線給電システム
5日前
日産自動車株式会社
ロータシャフト
28日前
ローム株式会社
モータドライバ回路
28日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
28日前
山洋電気株式会社
モータ
1か月前
アズビル株式会社
タービン式流量制御装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ