TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159652
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062385
出願日
2024-04-08
発明の名称
非接触受電装置
出願人
株式会社デンソー
代理人
個人
,
個人
主分類
H02J
50/05 20160101AFI20251014BHJP(電力の発電,変換,配電)
要約
【課題】受電電極と送電電極との間の送電効率の変動を抑制できる非接触受電装置を提供すること。
【解決手段】非接触受電装置は、車体の下側に付与される非接触受電装置であって、ベース部材32と、ベース部材を下側に向けて付勢する弾性部材34と、ベース部材に設けられ、路面26と接する回転部材39と、ベース部材に路面に対向するように設けられ、路面に設けられる送電電極21から非接触で電力の供給を受ける受電電極31と、を備え、受電電極は、ベース部材に固定される。
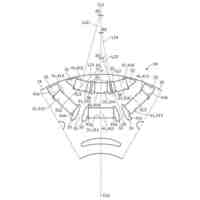
【選択図】図4
特許請求の範囲
【請求項1】
車体(11)の下側に取り付けられる非接触受電装置であって、
ベース部材(32)と、
前記ベース部材を下側に向けて付勢する弾性部材(34)と、
前記ベース部材に設けられ、路面(26)と接する回転部材(39)と、
前記路面に対向するように前記ベース部材に設けられてあって、前記路面に設けられる送電電極(21)から非接触で電力の供給を受ける受電電極(31)と、を備える非接触受電装置。
続きを表示(約 930 文字)
【請求項2】
前記ベース部材は誘電体である、請求項1に記載の非接触受電装置。
【請求項3】
前記ベース部材の誘電正接は0.1以下である、請求項2に記載の非接触受電装置。
【請求項4】
前記受電電極は、前記送電電極から電界結合を用いて非接触で電力の供給を受けるように構成されており、
前記ベース部材において前記受電電極よりも上側となる部分に、前記受電電極と対向するようにグランド板(33)が設けられている請求項2に記載の非接触受電装置。
【請求項5】
前記受電電極は、前記送電電極から電界結合を用いて非接触で電力の供給を受けるように構成されており、さらに、
前記受電電極よりも上側となる位置に、前記受電電極と対向するように配置されたグランド板(33)と、
前記受電電極と前記グランド板との間に配置されてあって、前記受電電極に対して前記グランド板を支持するための誘電体である支持部材(40)と、を備える、請求項2に記載の非接触受電装置。
【請求項6】
前記支持部材は、前記受電電極と前記グランド板との間に空隙を形成する形状を有する、請求項5に記載の非接触受電装置。
【請求項7】
前記受電電極として、左側受電電極(31L)と、右側受電電極(31R)とを備え、
前記回転部材として、左側前輪(37Lf)と、左側後輪(37Lb)と、右側前輪(37Rf)と、右側後輪(37Rb)と、を備える、請求項5または6に記載の非接触受電装置。
【請求項8】
前記受電電極は、前記送電電極から電界結合を用いて非接触で電力の供給を受けるように構成されており、
前記受電電極として、左側受電電極(31L)と、右側受電電極(31R)とを備え、
前記支持部材は、
前記左側受電電極と前記グランド板とに挟まれる左側支持部(40L)と、
前記右側受電電極と前記グランド板とに挟まれる右側支持部(40R)と、を備え、
前記左側支持部と前記右側支持部との間には空隙が設けられている、請求項5または6に記載の非接触受電装置。
発明の詳細な説明
【技術分野】
【0001】
この明細書における開示は、非接触給電システムにおける受電側の装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1は、電界結合方式の非接触給電で動作する搬送装置を開示している。この搬送装置は、床または机などの搬送経路に設けられた送電電極と、車体底面に設けられている受電電極とが電界結合するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-168370号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の搬送装置では、床表面にうねりや段差がある場合に、受電電極と送電電極との間隔が変動してしまい、受電電極と送電電極との間の送電効率が変動する課題があった。
【0005】
開示されるひとつの目的は、受電電極と送電電極との間の送電効率の変動を抑制できる非接触受電装置を提供することにある。
【課題を解決するための手段】
【0006】
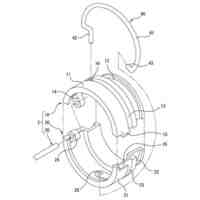
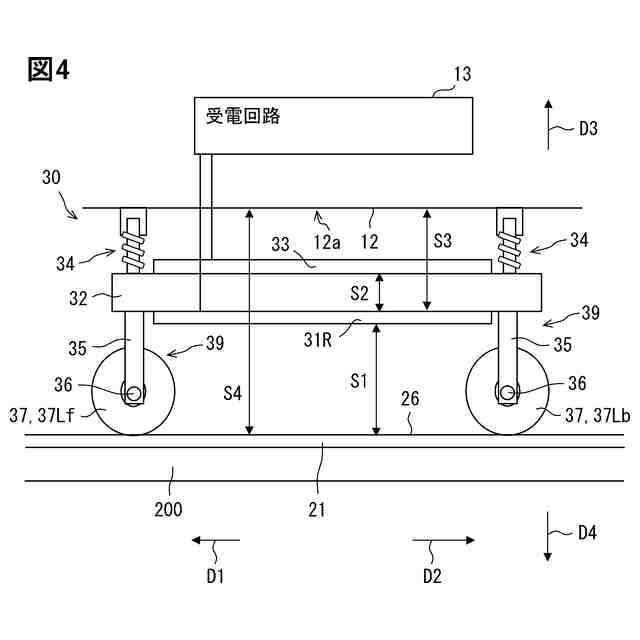
ここに開示された非接触受電装置は、車体(11)の下側に取り付けられる非接触受電装置であって、ベース部材(32)と、ベース部材を下側に向けて付勢する弾性部材(34)と、ベース部材に設けられ、路面(26)と接する回転部材(39)と、路面に対向するようにベース部材に設けられてあって、路面に設けられる送電電極(21)から非接触で電力の供給を受ける受電電極(31)と、を備える。
【0007】
上記構成におけるベース部材は、弾性部材によって下方向へ付勢されて、ベース部材に設けられた回転部材が路面と接する。路面と接する回転部材によって、ベース部材と路面との間隔が一定に保たれる。これにより、ベース部材に設けられる受電電極と路面に設けられる送電電極の間隔が一定に保たれる。従って、開示された非接触受電装置によれば、受電電極と送電電極との間の送電効率が変動しにくくなる。
【図面の簡単な説明】
【0008】
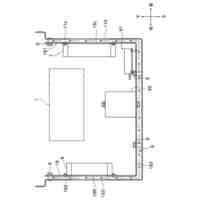
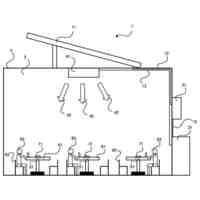
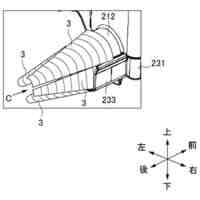
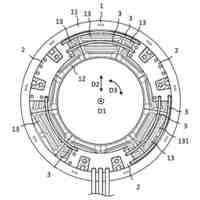
モバイルロボットの上面図である。
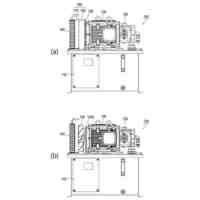
モバイルロボットの側面図である。
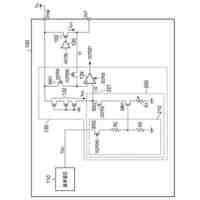
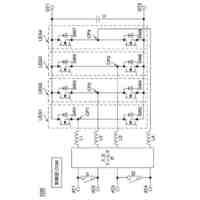
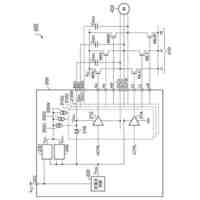
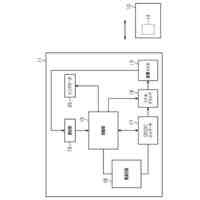
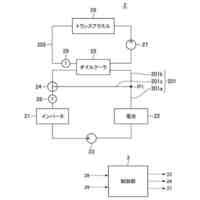
モバイルロボットと送電装置と非接触受電装置の構成を示すブロック図である。
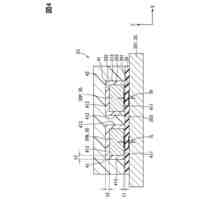
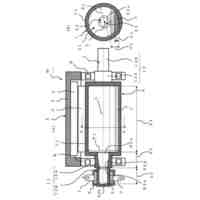
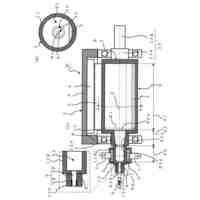
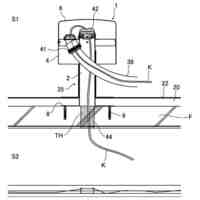
非接触受電装置の側面図である。
非接触受電装置の正面図である。
変形例に係る非接触受電装置の正面図である。
変形例に係る非接触受電装置の正面図である。
変形例に係る非接触受電装置の上面図である。
変形例に係る非接触受電装置の正面図である。
変形例に係るモバイルロボットの上面図である。
第2実施形態に係るモバイルロボットの側面図である。
第2実施形態に係るモバイルロボットの側面図である。
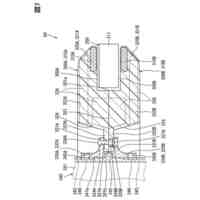
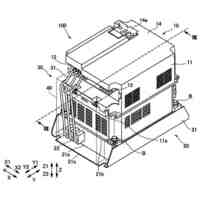
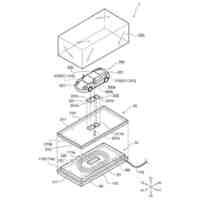
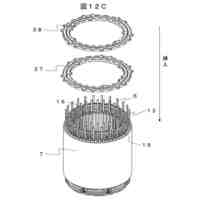
第2実施形態に係る非接触受電装置の斜視図である。
第2実施形態に係る非接触受電装置の上面図である。
第2実施形態に係る非接触受電装置の側面図である。
変形例に係る非接触受電装置の上面図である。
【発明を実施するための形態】
【0009】
(第1実施形態)
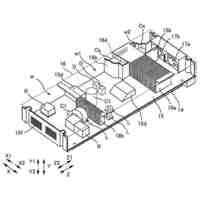
非接触給電システム1は、モバイルロボット10、送電装置20、および非接触受電装置30を備えている。非接触給電システム1は、非接触受電装置30を介して、送電装置20からモバイルロボット10へ非接触で電力を給電する。
【0010】
非接触受電装置30は、電界結合によって非接触給電を受ける装置である。非接触受電装置30は、受電電極31を備えている。非接触受電装置30は、送電電極21と受電電極31との間の電界結合によって受電する。送電電極21および受電電極31の詳細については後述する。非接触受電装置30は、図1および図2に示すようにモバイルロボット10に付与されて用いられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
高圧電気機器の開閉器
18日前
株式会社アイドゥス企画
減反モータ
18日前
株式会社デンソー
端子台
11日前
株式会社デンソー
回転電機
2日前
株式会社ダイヘン
送配電装置
2日前
富士電機株式会社
電力変換装置
2日前
株式会社不二越
空冷式油圧装置
2日前
富士電機株式会社
電力変換装置
2日前
ローム株式会社
半導体集積回路
9日前
本田技研工業株式会社
回転電機
4日前
矢崎総業株式会社
電源回路
17日前
株式会社TMEIC
制御装置
10日前
株式会社日立製作所
回転電機
9日前
矢崎総業株式会社
給電装置
10日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
25日前
日産自動車株式会社
ロータシャフト
25日前
ローム株式会社
モータドライバ回路
25日前
日産自動車株式会社
ロータシャフト
25日前
株式会社イノコンバンク
無線給電システム
2日前
大和ハウス工業株式会社
敷設用機器
10日前
京商株式会社
模型用非接触電力供給システム
18日前
サンデン株式会社
モータ
3日前
サンデン株式会社
モータ
3日前
株式会社土井製作所
ケーブル保護管路
9日前
株式会社TMEIC
電力変換装置
10日前
株式会社日立産機システム
回転電機
9日前
豊田合成株式会社
車両用非接触充電装置
1か月前
ローム株式会社
半導体装置
9日前
ローム株式会社
半導体装置
9日前
ジヤトコ株式会社
治具
2日前
矢崎総業株式会社
電気接続箱
4日前
トヨタ自動車株式会社
熱利用回路
11日前
多摩川精機株式会社
モータ
2日前
本田技研工業株式会社
回転電機用ロータ
18日前
Astemo株式会社
充電制御装置
9日前
株式会社京三製作所
パルス電源装置
17日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ