TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134139
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024031845
出願日
2024-03-04
発明の名称
車両制御装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
30/00 20060101AFI20250909BHJP(車両一般)
要約
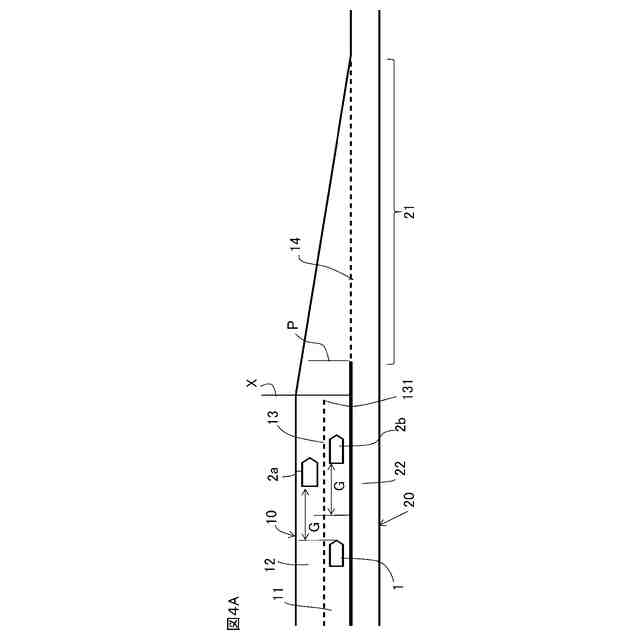
【課題】自車両が走行している車線と他車両が走行している車線とが並行して存在し、これらの車線が別の車線に同一地点で接続される道路構成であっても、当該別の車線に自車両を適切に合流させる車両制御装置を提供する。
【解決手段】車両制御装置(100)は、速度制御切り替え位置決定部(104)により決定した速度制御切り替え位置に自車両(1)が到達するまでの間、自車両(1)が走行する車線に隣接する車線を走行する他車両(2)の少なくとも一部分が、自車両(1)の進行方向と直交する方向に自車両(1)の少なくとも一部分に重ならないように自車両(1)を速度制御して、自車両(1)を別の車線へ合流させるように構成されている。
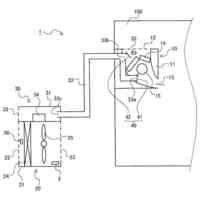
【選択図】図1
特許請求の範囲
【請求項1】
自車両の走行状態情報と、前記自車両の周辺を走行する他車両の走行状態情報と、前記自車両の周辺の道路情報と、を取得する情報取得部と、
前記情報取得部により取得した前記道路情報に基づき、前記自車両の走行シーンを判定する走行シーン判定部と、
前記情報取得部により取得した前記道路情報が、前記自車両が走行する第1の車線に隣接する第2の車線に、走行中の他車両が存在することを示し、かつ、前記走行シーン判定部により判定した前記自車両の走行シーンが、前記第1の車線から第3の車線への合流前であることを示すとき、前記自車両の速度制御を切り替えるべき前記第1の車線における速度制御切り替え位置を決定する、速度制御切り替え位置決定部と、
前記速度制御切り替え位置決定部により決定された前記速度制御切り替え位置に前記自車両が到達するまでの間、前記第2の車線を走行する前記他車両の少なくとも一部分が、前記自車両の進行方向と直交する方向に前記自車両の少なくとも一部分に重ならないように、前記自車両の目標速度を設定する速度制御部と、
前記速度制御部により設定された前記目標速度に基づいて、前記自車両を制御する車両制御部と、
を備えている、
ことを特徴とする車両制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記速度制御切り替え位置決定部は、
情報取得部により取得した前記道路情報に基づき、前記第1の車線と前記第2の車線とを含む道路の車線数が減少を開始する車線減少開始位置、もしくは第1の車線と前記第2の車線とが前記第3の車線に合流することが可能な合流可能位置、を取得し、前記車線減少開始位置もしくは前記合流可能位置に基づき、前記速度制御切り替え位置を決定するように構成されている、
ことを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記速度制御部は、
前記第2の車線を走行する前記他車両が前記自車両の前方に存在する場合は、前記速度制御切り替え位置における前記前方に存在する前記他車両の進行方向相対位置を予測し、当該予測した前記前方に存在する前記他車両の進行方向相対位置が、あらかじめ定められた第1の進行方向相対位置よりも前記自車両に近い位置にあるときは、前記自車両と前記前方に存在する前記他車両との間の車間距離を、あらかじめ定められた車間距離以上に維持するように前記自車両の目標速度を設定し、
前記第2の車線を走行する前記他車両が前記自車両の後方に存在する場合は、前記速度制御切り替え位置における前記後方に存在する前記他車両の進行方向相対位置を予測し、当該予測した前記後方に存在する前記他車両の進行方向相対位置が、あらかじめ定められた第2の進行方向相対位置よりも前記自車両に近い位置にあるときは、前記自車両を前記後方に存在する前記他車両の後方に移動させるように前記自車両の目標速度を設定する、
ように構成されている、
ことを特徴とする請求項1又は2に記載の車両制御装置。
【請求項4】
前記速度制御部は、
前記自車両が走行する前記第1の車線が、その延びる方向に対して直交する方向に前記第3の車線から遠いほど、前記第1の進行方向相対位置と前記第2の進行方向相対位置とを、前記自車両に対してより後方に設定する、
ように構成されている、
ことを特徴とする請求項3に記載の車両制御装置。
【請求項5】
前記速度制御部は、
前記第1の車線に隣接する前記第2の車線に、前記自車両の前方および後方でそれぞれ他車両が存在する場合であって、前記自車両と前記前方の他車両との間の車間距離と、前記自車両と前記後方の他車両との間の車間距離と、の何れもが、あらかじめ定められた閾値以下のときは、前記自車両が前記前方の他車両と前記後方の他車両との間の中央位置を維持するための前記自車両の目標速度を設定する、
ように構成されている、
ことを特徴とする請求項1又は2に記載の車両制御装置。
【請求項6】
前記速度制御部は、
前記自車両が前記速度制御切り替え位置に近い位置にあるほど、前記自車両の加速度もしくは減速度の上限を大きく設定する、
ように構成されている、
ことを特徴とする請求項1又は2に記載の車両制御装置。
【請求項7】
前記速度制御部は、
前記自車両が前記速度制御切り替え位置に近い位置にあるほど、前記自車両の加速度もしくは減速度の上限を大きく設定する、
ように構成されている、
ことを特徴とする請求項3に記載の車両制御装置。
【請求項8】
前記速度制御部は、
前記自車両が前記速度制御切り替え位置に近い位置にあるほど、前記自車両の加速度もしくは減速度の上限を大きく設定する、
ように構成されている、
ことを特徴とする請求項5に記載の車両制御装置。
【請求項9】
前記速度制御部は、
前記自車両が前記速度制御切り替え位置に到達するまでに、前記第2の車線を走行する他車両と前記自車両との間にあらかじめ定められた車間距離を維持できないと判定したときは、前記自車両の車両制御の権限を前記自車両の運転者に移譲することを前記運転者に要求する、
ように構成されている、
ことを特徴とする請求項1又は2に記載の車両制御装置。
【請求項10】
前記速度制御部は、
前記自車両が前記速度制御切り替え位置に到達するまでに、前記第2の車線を走行する他車両と前記自車両との間にあらかじめ定められた車間距離を維持できないと判定したときは、前記自車両の車両制御の権限を前記自車両の運転者に移譲することを前記運転者に要求する、
ように構成されている、
ことを特徴とする請求項3に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、車両の運転者の負担を軽減するために、車両に対する制限速度の切り替わりなどの車両が走行すべき制限速度の変化に応じて、適切に自車両の走行速度を自動制御するようにした運転支援技術が提案されている。また、当該運転支援技術の一つとして、自車両を支線から本線に円滑に合流させるよう制御する車両制御システムが提案されている。
【0003】
たとえば、特許文献1には、自車両が支線から合流しようとする本線を走行する車両の状態に基づき、自車両が本線に合流する複数の合流ターゲット位置候補を設定し、当該合流ターゲット位置候補に自車両が到達するまでの走行距離を導出し、当該走行距離に基づいて、上記合流ターゲット位置候補から本線を走行する車両に対する相対的な位置としての合流ターゲット位置を決定し、当該合流ターゲット位置に向けて自車両が走行するように、自車両の少なくとも加減速を自動的に制御して自車両のスムーズな本線への合流を実現するようにした技術が提案されている。
【先行技術文献】
【特許文献】
【0004】
特許第6327424号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された従来の技術は、高速道路などの本線に合流する支線が1車線であることを前提にして構成されているため、支線に複数の車線が並存する場合に、支線の異なる車線を走行する他車両との間で充分な車間距離を維持しながら、自車両を本線に合流させることが困難となる場合があった。たとえば、本線への合流開始地点で自車両と他車両とが並走して接近してしまい、自車両を本線に円滑に合流させることが困難となる可能性があった。
【0006】
本開示は、従来の技術における上記のような課題を解決するための技術を開示するものであり、自車両が走行している第1の車線と他車両が走行している第2の車線とが並行して存在し、これらの車線が第3の車線に同一地点で接続される道路構成であっても、自車両の適切な第3の車線への合流を実現する車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の車両制御装置は、
自車両の走行状態情報と、前記自車両の周辺を走行する他車両の走行状態情報と、前記自車両の周辺の道路情報と、を取得する情報取得部と、
前記情報取得部により取得した前記道路情報に基づき、前記自車両の走行シーンを判定する走行シーン判定部と、
前記情報取得部により取得した前記道路情報が、前記自車両が走行する第1の車線に隣接する第2の車線に、走行中の他車両が存在することを示し、かつ、前記走行シーン判定部により判定した前記自車両の走行シーンが、前記第1の車線から第3の車線への合流前であることを示すとき、前記自車両の速度制御を切り替えるべき前記第1の車線における位置を決定する速度制御切り替え位置決定部と、
前記速度制御切り替え位置決定部により決定された前記速度制御切り替え位置に前記自車両が到達するまでの間、前記第2の車線を走行する前記他車両の少なくとも一部分が、前記自車両の進行方向と直交する方向に前記自車両の少なくとも一部分に重ならないように、前記自車両の目標速度を設定する速度制御部と、
前記速度制御部により設定された前記目標速度に基づいて、前記自車両を制御する車両制御部と、
を備えている、
ことを特徴とする。
【発明の効果】
【0008】
本開示の車両制御装置によれば、自車両が走行している第1の車線と他車両が走行している第2の車線とが並行して存在し、これらの車線が第3の車線に同一地点で接続される道路構成であっても、自車両の適切な第3の車線への合流を実現する車両制御装置が得られる。
【図面の簡単な説明】
【0009】
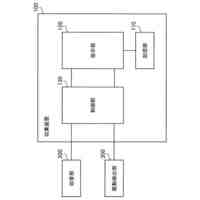
実施の形態1による車両制御装置の構成を示す機能ブロック図である。
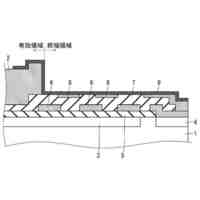
支線の加速車線が本線の走行車線に連結される道路を示す説明図である。
実施の形態1による車両制御装置の動作を示すフローチャートである。
実施の形態1による車両制御装置の動作の具体例1を示す説明図である。
実施の形態1による車両制御装置の動作の具体例2を示す説明図である。
実施の形態1による車両制御装置の動作の具体例3を示す説明図である。
実施の形態1による車両制御装置の動作の具体例4を示す説明図である。
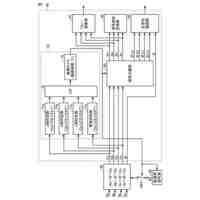
実施の形態1による車両制御装置を構成するECUのハードウェア構成の一例を示すブロック図である。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、実施の形態1による車両制御装置の構成を示す機能ブロック図である。図1において、EV(Electric Vehicle)、ハイブリッド車、内燃機関駆動自動車、などの自車両1は、運転者の負担を軽減するための運転支援技術を採用した車両制御装置100が搭載されている。自車両1に搭載された車両制御装置100は、情報取得部101と、自動速度制御部102と、を備えている。当該自動速度制御部102は、走行シーン判定部103と、速度制御切り替え位置決定部104と、速度制御部105と、車両制御部106と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
冷蔵庫
27日前
三菱電機株式会社
冷蔵庫
4日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
扇風機
25日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
増幅器
1か月前
三菱電機株式会社
収集装置
1か月前
三菱電機株式会社
電子機器
1か月前
三菱電機株式会社
照明装置
18日前
三菱電機株式会社
電気機器
4日前
三菱電機株式会社
空気調和機
1か月前
三菱電機株式会社
回路遮断器
12日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
保護リレー
26日前
三菱電機株式会社
加熱調理器
12日前
三菱電機株式会社
貯湯式給湯機
18日前
三菱電機株式会社
光源デバイス
18日前
三菱電機株式会社
炊飯システム
27日前
三菱電機株式会社
制御システム
18日前
三菱電機株式会社
空調システム
20日前
三菱電機株式会社
点検管理装置
25日前
三菱電機株式会社
空調システム
1か月前
三菱電機株式会社
貯湯式給湯機
28日前
三菱電機株式会社
貯湯式給湯機
27日前
三菱電機株式会社
ねじ締め装置
1か月前
三菱電機株式会社
調理システム
27日前
三菱電機株式会社
空気清浄装置
12日前
三菱電機株式会社
樹脂成形用金型
1か月前
三菱電機株式会社
電磁波発生装置
4日前
三菱電機株式会社
誘導加熱調理器
1か月前
三菱電機株式会社
移動体監視装置
17日前
三菱電機株式会社
加熱調理システム
17日前
三菱電機株式会社
全館空調システム
1か月前
三菱電機株式会社
道路情報補正装置
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ