TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025167441
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024072028
出願日
2024-04-26
発明の名称
移動体監視装置
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
13/91 20060101AFI20251030BHJP(測定;試験)
要約
【課題】 移動体がどこにある場合でも、移動体の検出位置のばらつきを抑える。
【解決手段】 移動体4が送信する信号を受信した受信局3の測位最小個数の組合せである受信局組合せごとに、受信局組合せに含まれる各受信局3の位置と受信時刻に基づき、移動体4が信号を送信した位置である個別計算位置P
j
を計算する個別計算位置計算部16と、各個別計算位置P
j
において他の個別計算位置P
k
との距離である隣接距離に基づき、個別計算位置P
j
ごとの小さい順に並べた隣接距離の列において最小を含み連続して並ぶ決められた第1の個数の隣接距離の集合である各個別計算位置の隣接距離集合を使用して判断する決められた隣接距離条件を満足する個別計算位置である移動体位置候補を抽出する移動体位置候補抽出部17と、移動体位置候補に基づき移動体の位置である移動体位置P
P
を計算する移動体位置計算部18とを備えた。
【選択図】 図2
特許請求の範囲
【請求項1】
移動体が送信する信号を受信する複数の受信局の位置を記憶する位置データ記憶部と、
前記受信局が前記信号を受信した時刻である受信時刻を取得する受信時刻取得部と、
前記信号を受信した前記受信局の、前記移動体が地球表面にある場合は3個であり、前記移動体が空中にある場合は4個である測位最小個数の組合せである受信局組合せを、決められた個数あるいは可能なすべての組合せの個数のどちらか大きくない方である組合せ個数だけ生成する受信局組合せ生成部と、
前記受信局組合せごとに、前記受信局組合せに含まれる各前記受信局の位置と前記受信時刻に基づき、前記受信局組合せに含まれる各前記受信局が前記受信時刻に前記信号を受信する、前記移動体が前記信号を送信した位置である個別計算位置を計算する個別計算位置計算部と、
各前記個別計算位置において他の前記個別計算位置との距離である隣接距離に基づき、前記個別計算位置ごとの小さい順に並べた前記隣接距離の列において最小を含み連続して並ぶ決められた第1の個数の前記隣接距離の集合である前記個別計算位置の隣接距離集合を使用して判断する決められた隣接距離条件を満足する、あるいは前記隣接距離集合に含まれる何れかの前記隣接距離を有する前記個別計算位置の集合である前記個別計算位置の隣接個別計算位置集合を使用して判断する決められた隣接集合条件を満足する、前記個別計算位置である移動体位置候補を抽出する移動体位置候補抽出部と、
前記移動体位置候補に基づき前記移動体の位置である移動体位置を計算する移動体位置計算部とを備えた移動体監視装置。
続きを表示(約 1,900 文字)
【請求項2】
前記移動体位置候補抽出部が、前記隣接距離集合に基づき決められた隣接距離指標が前記隣接距離条件を満足する前記個別計算位置を前記移動体位置候補として抽出する請求項1に記載の移動体監視装置。
【請求項3】
前記移動体位置候補抽出部が、前記隣接距離指標が決められた指標上限値以下である前記個別計算位置を前記移動体位置候補として抽出する、請求項2に記載の移動体監視装置。
【請求項4】
前記移動体位置候補抽出部が、前記隣接距離指標が小さい順に並べられた前記個別計算位置の列において最小を含み連続して並ぶ決められた第2の個数の前記個別計算位置である個別計算位置集合に含まれる各前記個別計算位置が前記個別計算位置集合において最小から何番目かに基づき決められた第2の重み付け係数と各前記個別計算位置の前記隣接距離指標の積の和である基準隣接距離指標で、前記個別計算位置の前記隣接距離指標を除算した値である対基準比が決められた比上限値以下である前記個別計算位置を前記移動体位置候補として抽出する、請求項2に記載の移動体監視装置。
【請求項5】
前記移動体位置候補抽出部が、前記隣接距離指標が決められた指標上限値以下である前記個別計算位置と、前記隣接距離指標が小さい順に並べられた前記個別計算位置の列において最小を含み連続して並ぶ決められた第2の個数の前記個別計算位置である個別計算位置集合に含まれる各前記個別計算位置が前記個別計算位置集合において最小から何番目かに基づき決められた第2の重み付け係数と各前記個別計算位置の前記隣接距離指標の積の和である基準隣接距離指標で、前記個別計算位置の前記隣接距離指標を除算した値である対基準比が決められた比上限値以下である前記個別計算位置とを、前記移動体位置候補として抽出する、請求項2に記載の移動体監視装置。
【請求項6】
前記移動体位置候補抽出部が、前記隣接距離指標が決められた指標上限値以下であり、かつ、前記隣接距離指標が小さい順に並べられた前記個別計算位置の列において最小を含み連続して並ぶ決められた第2の個数の前記個別計算位置である個別計算位置集合に含まれる各前記個別計算位置が前記個別計算位置集合において最小から何番目かに基づき決められた第2の重み付け係数と各前記個別計算位置の前記隣接距離指標の積の和である基準隣接距離指標で、前記個別計算位置の前記隣接距離指標を除算した値である対基準比が決められた比上限値以下である前記個別計算位置を、前記移動体位置候補として抽出する、請求項2に記載の移動体監視装置。
【請求項7】
前記移動体位置候補抽出部が、前記個別計算位置の前記隣接距離集合に含まれる各前記隣接距離が前記隣接距離集合において最小から何番目かに基づき決められた第1の重み付け係数と各前記隣接距離との積の和を前記個別計算位置の前記隣接距離指標として決める、請求項2から請求項6の何れか1項に記載の移動体監視装置。
【請求項8】
前記移動体位置候補抽出部が、各前記個別計算位置である自個別計算位置の前記隣接距離集合に含まれる前記隣接距離を有する他の前記個別計算位置である相手個別計算位置の前記隣接距離集合において前記自個別計算位置との前記隣接距離が小さい方から何番目かを表す、前記相手個別計算位置との前記隣接距離に対応する順位距離に基づき、前記個別計算位置の前記隣接距離集合に含まれる各前記隣接距離が前記隣接距離集合において最小から何番目かに基づき決められた第1の重み付け係数と各前記隣接距離に対応する前記順位距離との積の和を前記個別計算位置の前記隣接距離指標として決める、請求項2から請求項6の何れか1項に記載の移動体監視装置。
【請求項9】
前記移動体位置候補抽出部が、前記個別計算位置である自個別計算位置の前記隣接個別計算位置集合に含まれる前記個別計算位置である相手個別計算位置の前記隣接個別計算位置集合に前記自個別計算位置が含まれる場合に、前記自個別計算位置と前記相手個別計算位置とを同じグループに属すると判断し、
前記移動体位置候補抽出部が、前記グループに属する前記個別計算位置の個数が最大である前記グループに属するという前記隣接集合条件を満足する前記個別計算位置を前記移動体位置候補として抽出する、請求項1に記載の移動体監視装置。
【請求項10】
前記移動体位置計算部が、前記移動体位置候補の平均の位置を前記移動体位置として計算する、請求項1から請求項6、請求項9の何れか1項に記載の移動体監視装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、航空機などの移動体の位置を計測して監視する移動体監視装置に関する。
続きを表示(約 5,100 文字)
【背景技術】
【0002】
マルチラテレーションシステムは、空港面にある航空機あるいは空港の近傍を飛行する航空機の位置を計測するシステムである。マルチラテレーションシステムでは、空港の滑走路の周辺に少なくとも8個程度、多い場合は40個程度の受信局を配置する。マルチラテレーションシステムでは、航空機に搭載されたトランスポンダからの信号
電波を各受信局が受信し、各受信局での受信時刻の差と各受信局の位置を利用して航空機の位置を算出する。マルチラテレーションシステムにおいて、受信局の数が多い場合には、受信局の組合せの数により、多数の検出位置解が発生する。このため、1つまたは複数の解が、マルチパス等により大きく位置が外れた場合、複数解の位置から重心位置を算出する際に検出位置がばらついてしまう傾向がある。
【0003】
また、目標である航空機が誘導路、滑走路などの経路のセンターライン(中心線)を通過するのを前提に設計されているので、検出位置がばらつくと、表示装置の目標表示が経路のセンターラインから外れてしまうため、航空機を監視する管制官にとって違和感のある状態となり、多数の航空機を管制する場合の課題であった。
【0004】
目標処理器において、経路のセンターライン情報をデータベースにあらかじめ蓄積しておき、受信局の組合せ数だけ発生する多数の検出位置解からセンターラインまでの垂直距離を算出し、この垂直距離に応じて算出された各検出位置解に対する重み付けを用いて目標の位置座標を特定する方法がある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0005】
特開2011-21978
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の方法では、センターライン情報が得られる場所でしか対応できない。センターライン情報を入力およびメンテナンスするのに労力を要する。
本開示は、移動体がどこにある場合でも、移動体の検出位置のばらつきを抑えることができる移動体監視装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
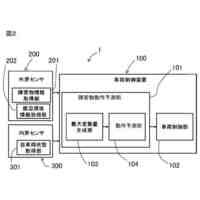
本開示に係る移動体監視装置は、移動体が送信する信号を受信する複数の受信局の位置を記憶する位置データ記憶部と、受信局が信号を受信した時刻である受信時刻を取得する受信時刻取得部と、信号を受信した受信局の、移動体が地球表面にある場合は3個であり、移動体が空中にある場合は4個である測位最小個数の組合せである受信局組合せを、決められた個数あるいは可能なすべての組合せの個数のどちらか大きくない方である組合せ個数だけ生成する受信局組合せ生成部と、受信局組合せごとに、受信局組合せに含まれる各受信局の位置と受信時刻に基づき、受信局組合せに含まれる各受信局が受信時刻に信号を受信する、移動体が信号を送信した位置である個別計算位置を計算する個別計算位置計算部と、各個別計算位置において他の個別計算位置との距離である隣接距離に基づき、個別計算位置ごとの小さい順に並べた隣接距離の列において最小を含み連続して並ぶ決められた第1の個数の隣接距離の集合である各個別計算位置の隣接距離集合を使用して判断する決められた隣接距離条件を満足する、あるいは隣接距離集合に含まれる何れかの隣接距離を有する個別計算位置の集合である各個別計算位置の隣接個別計算位置集合を使用して判断する決められた隣接集合条件を満足する、個別計算位置である移動体位置候補を抽出する移動体位置候補抽出部と、移動体位置候補に基づき移動体の位置である移動体位置を計算する移動体位置計算部とを備えたものである。
【発明の効果】
【0008】
本開示に係る移動体監視装置によれば、移動体がどこにある場合でも、移動体の検出位置のばらつきを抑えることができる。
【図面の簡単な説明】
【0009】
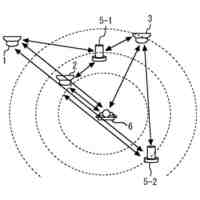
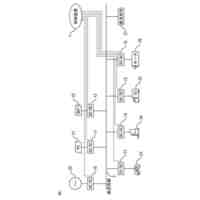
実施の形態1に係る航空機監視装置を含む航空機監視システムの構成を説明する図である。
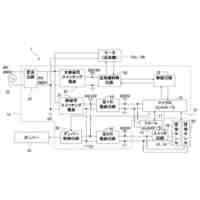
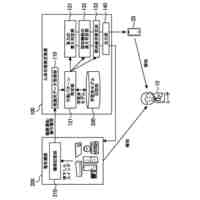
実施の形態1に係る航空機監視装置の機能構成を説明するブロック図である。
航空機監視装置において受信局のペアの受信時刻の差から航空機位置を決定する様子を示す図である。
実施の形態1に係る航空機監視装置の全体動作を説明するフローチャートである。
実施の形態1に係る航空機監視装置が応答信号受信データを受信して航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態1に係る航空機監視装置が航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態1に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態1に係る航空機監視装置が決める航空機位置を説明するために使用するプロットを示す図である。
実施の形態1に係る航空機監視装置がプロットから決めた航空機位置候補および航空機位置を示す図である。
実施の形態1の第1の変形例に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態1の第1の変形例に係る航空機監視装置が航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態1の第1の変形例に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態1の第1の変形例に係る航空機監視装置が有する航空機位置計算部が航空機位置候補から航空機位置を決定する処理を説明するフローチャートの前半部分である。
実施の形態1の第1の変形例に係る航空機監視装置が有する航空機位置計算部が航空機位置候補から航空機位置を決定する処理を説明するフローチャートの後半部分である。
実施の形態1の第1の変形例に係る航空機監視装置がプロットから決めた航空機位置候補および航空機位置を示す図である。
実施の形態1の第2の変形例に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態1の第2の変形例に係る航空機監視装置が航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態1の第2の変形例に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態2に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態2に係る航空機監視装置が有する航空機位置候補抽出部の動作を説明するプロットの例を示す図である。
実施の形態2に係る航空機監視装置が有する航空機位置候補抽出部が使用する順序化番号、隣接順位、順位距離、順位距離指標および航空機位置候補を例により説明する図である。
実施の形態2に係る航空機監視装置が航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態2に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態3に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態3に係る航空機監視装置が航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態3に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートの前半部分である。
実施の形態3に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートの後半部分である。
実施の形態3に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理の過程を例により説明する図である。
実施の形態4に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態4に係る航空機監視装置が有する航空機位置統合部が決定する内分比率の例を説明する図である。
実施の形態4に係る航空機監視装置の全体動作を説明するフローチャートである。
実施の形態4に係る航空機監視装置が応答信号受信データを受信して航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態4に係る航空機監視装置がプロットおよび予測航空機位置に基づき航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態4に係る航空機監視装置が有する第2航空機位置候補抽出部がプロットから第2航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態4に係る航空機監視装置が速度または加速度が大きい場合に決めた航空機位置候補および航空機位置を示す図である。
実施の形態4に係る航空機監視装置が速度および加速度が小さい場合に決めた第2航空機位置候補および航空機位置を示す図である。
実施の形態4に係る航空機監視装置が速度および加速度が中間の値である場合に決めた航空機位置候補、第2航空機位置候補および航空機位置を示す図である。
実施の形態4の第1の変形例に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態4の第1の変形例に係る航空機監視装置が有する航空機位置統合部が決定する内分比率の例を説明する図である。
実施の形態5に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態5に係る航空機監視装置がプロットおよび予測航空機位置に基づき航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態5に係る航空機監視装置が有する航空機位置候補抽出部がプロットから航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態5に係る航空機監視装置が有する第2航空機位置候補抽出部がプロットから第2航空機位置候補を抽出する処理を説明するフローチャートである。
実施の形態5に係る航空機監視装置が速度または加速度が大きい場合に決めた航空機位置候補および航空機位置を示す図である。
実施の形態6に係る航空機監視装置の機能構成を説明するブロック図である。
実施の形態6に係る航空機監視装置が有する航空機位置統合部が決定する内分比率の例を説明する図である。
実施の形態6に係る航空機監視装置の全体動作を説明するフローチャートである。
実施の形態6に係る航空機監視装置が応答信号受信データを受信して航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
実施の形態6に係る航空機監視装置がプロットおよび予測航空機位置に基づき航空機位置を求めて軌跡を更新する処理を説明するフローチャートである。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、実施の形態1に係る航空機監視装置を含む航空機監視システムの構成を説明する図である。航空機監視システム50は、航空機監視装置1、送信局2、複数(N個)の受信局3
1
~3
N
、監視対象の航空機4および地上ネットワーク5を主に有して構成される。航空機監視装置1は、航空機4の位置を求めて航空機4を監視する装置である。送信局2は、航空機4に無線で質問信号を送信する無線通信局である。受信局3
1
~3
N
は、質問信号を受信した航空機4が無線で送信する応答信号を受信する無線通信局である。ある1個の受信局3は、受信局3
j
と表記する。応答信号は、移動体である航空機4が送信する信号である。地上ネットワーク5は、航空機監視装置1、送信局2および受信局3
1
~3
N
の間での通信を可能にする地上に敷設された有線の通信ネットワークである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
冷蔵庫
9日前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
換気扇
2日前
三菱電機株式会社
扇風機
1か月前
三菱電機株式会社
電気機器
9日前
三菱電機株式会社
照明装置
23日前
三菱電機株式会社
換気装置
1日前
三菱電機株式会社
照明器具
3日前
三菱電機株式会社
回路遮断器
17日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
加熱調理器
17日前
三菱電機株式会社
電動送風機
1日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
保護リレー
1か月前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
光源デバイス
23日前
三菱電機株式会社
空調システム
25日前
三菱電機株式会社
空気清浄装置
17日前
三菱電機株式会社
位置算出装置
2日前
三菱電機株式会社
炊飯システム
1か月前
三菱電機株式会社
点検管理装置
1か月前
三菱電機株式会社
貯湯式給湯機
23日前
三菱電機株式会社
調理システム
1か月前
三菱電機株式会社
制御システム
23日前
三菱電機株式会社
車両制御装置
1日前
三菱電機株式会社
電磁波発生装置
9日前
三菱電機株式会社
移動体監視装置
22日前
三菱電機株式会社
見守りシステム
2日前
三菱電機株式会社
回転電機ユニット
22日前
三菱電機株式会社
運転支援システム
1か月前
三菱電機株式会社
回転電機ユニット
22日前
三菱電機株式会社
照明制御システム
9日前
三菱電機株式会社
直流配電システム
3日前
三菱電機株式会社
空気調和システム
23日前
三菱電機株式会社
加熱調理システム
22日前
三菱電機株式会社
空気調和機の室内機
3日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ