TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025098836
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023215227
出願日
2023-12-20
発明の名称
エレベータ制御システム、制御方法
出願人
フジテック株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B66B
1/06 20060101AFI20250625BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】エレベータの運行効率を向上させる。
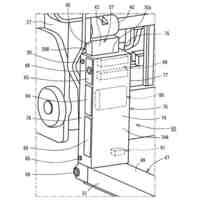
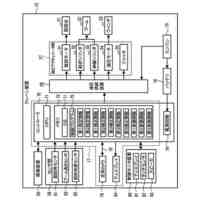
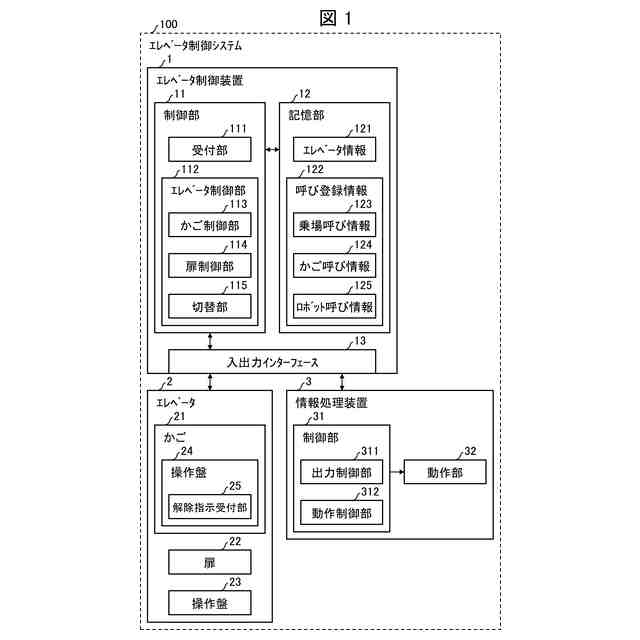
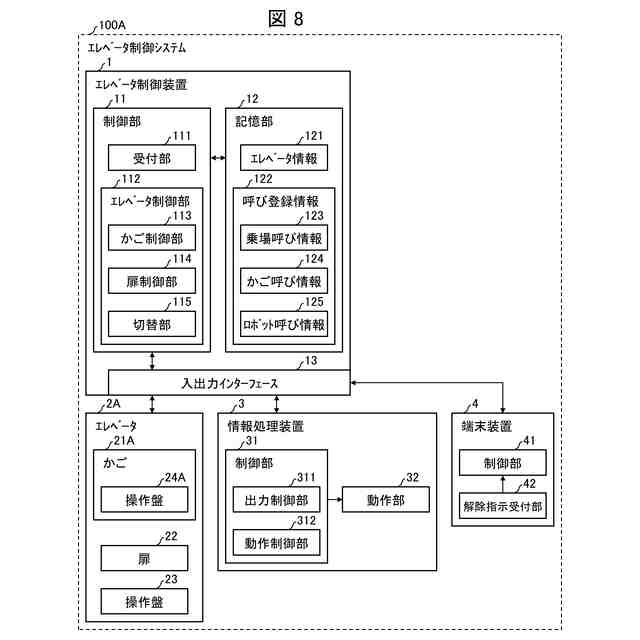
【解決手段】エレベータ制御システム(100)は、エレベータ(2)を利用可能な情報処理装置(3)からの呼び登録を受け付けた場合、情報処理装置が乗車するかご(21)が、人からの呼び登録に応じないロボット専用運転モードで動作するように、エレベータを制御するエレベータ制御部(112)と、ロボット専用運転モードの解除を指示する入力操作を受け付ける解除指示受付部(25)と、を備え、エレベータ制御部は、解除指示受付部にて入力操作を受け付けると、ロボット専用運転モードを解除する。
【選択図】図1
特許請求の範囲
【請求項1】
エレベータを利用可能な情報処理装置からの呼び登録を受け付けた場合、前記情報処理装置が乗車するかごが、人からの呼び登録に応じないロボット専用運転モードで動作するように、前記エレベータを制御するエレベータ制御部と、
前記ロボット専用運転モードの解除を指示する入力操作を受け付ける解除指示受付部と、
を備え、
前記エレベータ制御部は、
前記解除指示受付部にて前記入力操作を受け付けると、前記ロボット専用運転モードを解除する、
エレベータ制御システム。
続きを表示(約 530 文字)
【請求項2】
前記解除指示受付部は、前記エレベータのかご内の操作盤に設けられる、
請求項1に記載のエレベータ制御システム。
【請求項3】
前記エレベータ制御部を備えるエレベータ制御装置と、
前記エレベータ制御装置と通信可能に接続される端末装置と、を備え、
前記解除指示受付部は、前記端末装置に設けられる、
請求項1に記載のエレベータ制御システム。
【請求項4】
1または複数のコンピュータにより実行されるエレベータ制御システムの制御方法であって、
エレベータを利用可能な情報処理装置からの呼び登録を受け付けた場合、前記情報処理装置が乗車するかごが、人からの呼び登録に応じないロボット専用運転モードで動作するように、前記エレベータを制御するエレベータ制御ステップと、
前記ロボット専用運転モードの解除を指示する入力操作を受け付ける解除指示受付ステップと、
を含み、
前記エレベータ制御ステップにおいて、
前記解除指示受付ステップにて前記入力操作を受け付けると、前記ロボット専用運転モードを解除する、
エレベータ制御システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットが利用可能なエレベータ制御システム、およびエレベータ制御システムの制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
自立走行型ロボットがエレベータを利用するとき、ロボットとエレベータを連携することが知られている。また、特許文献1に記載のように、ロボットとエレベータを連携する場合、ロボットと人との乗り合いを避けるために、ロボットからの連携要求があった際にエレベータをロボット専用運転モードに切り替えて運用することが一般的となっている。
【先行技術文献】
【特許文献】
【0003】
特開2023-50408号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
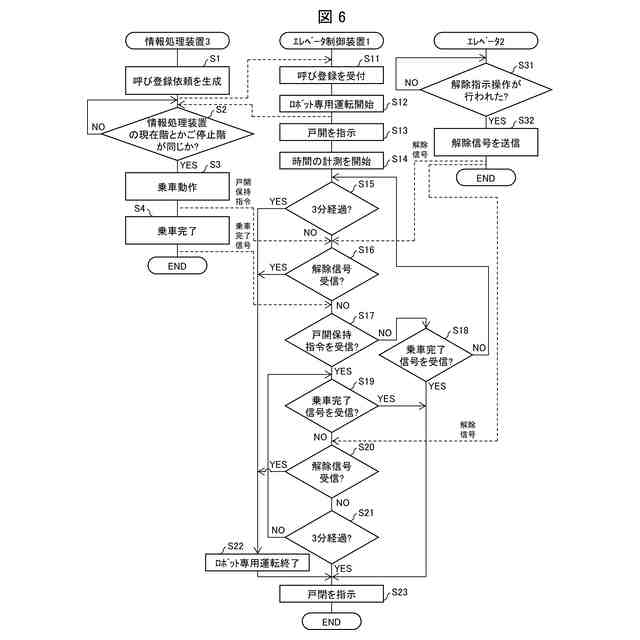
ロボットがエレベータに乗り降りする際、エレベータは、ロボットから戸開保持の通知を受けとってドアを開き続け、ロボットの乗車または降車が完了するとこれらの動作が完了した旨の通知を受け取ってドアを閉め始める。ここで、ロボットからの通知を受け取るべきタイミングで通信障害等によりロボットからの通知が途絶えた場合、ドアが閉まらない事態が生じ得る。
【0005】
この場合、自動運転に復旧するまでは、一般の利用者がエレベータを使用できない状態が継続し、エレベータの運行効率が低下する。
【0006】
本発明の一態様は、エレベータの運行効率を向上させることを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明の一態様に係るエレベータ制御システムは、エレベータを利用可能な情報処理装置からの呼び登録を受け付けた場合、前記情報処理装置が乗車するかごが、人からの呼び登録に応じないロボット専用運転モードで動作するように、前記エレベータを制御するエレベータ制御部と、前記ロボット専用運転モードの解除を指示する入力操作を受け付ける解除指示受付部と、を備え、前記エレベータ制御部は、前記解除指示受付部にて前記入力操作を受け付けると、前記ロボット専用運転モードを解除する。
【0008】
上記の課題を解決するために、本発明の一態様に係るエレベータ制御システムの制御方法は、1または複数のコンピュータにより実行されるエレベータ制御システムの制御方法であって、エレベータを利用可能な情報処理装置からの呼び登録を受け付けた場合、前記ロボットが乗車するかごが、人からの呼び登録に応じないロボット専用運転モードで動作するように、前記エレベータを制御するエレベータ制御ステップと、前記ロボット専用運転モードの解除を指示する入力操作を受け付ける解除指示受付ステップと、を含み、前記エレベータ制御ステップにおいて、前記解除指示受付ステップにて前記入力操作を受け付けると、前記ロボット専用運転モードを解除する。
【0009】
本発明の各態様に係るエレベータ制御システムは、コンピュータによって実現してもよく、この場合には、コンピュータを前記エレベータ制御システムが備える各部(ソフトウェア要素)として動作させることにより前記エレベータ制御システム置をコンピュータにて実現させるエレベータ制御システムの制御プログラム、およびそれを記録したコンピュータ読み取り可能な記録媒体も、本発明の範疇に入る。
【発明の効果】
【0010】
本発明の一態様によれば、エレベータの運行効率を向上させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
10か月前
ユニパルス株式会社
吊具
1か月前
個人
海上コンテナ昇降装置
7か月前
ユニパルス株式会社
荷役装置
6か月前
ユニパルス株式会社
吊具装置
7か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
産業車両
7か月前
水戸工業株式会社
吊り具
3か月前
ユニパルス株式会社
リフト装置
1か月前
株式会社豊田自動織機
荷役車両
11か月前
株式会社豊田自動織機
荷役車両
5か月前
大栄産業株式会社
クランプ
1か月前
ユニパルス株式会社
荷役助力装置
1か月前
株式会社日本キャリア工業
昇降機
10か月前
白山工業株式会社
バランサ
3か月前
ユニパルス株式会社
荷役助力装置
2か月前
ユニパルス株式会社
荷役助力装置
6日前
株式会社キトー
タイヤ用吊具
2か月前
個人
建築部材の吊り上げ装置
9か月前
株式会社ユピテル
システム等
3か月前
フジテック株式会社
エレベータ
5か月前
株式会社五十鈴製作所
搬送装置
1か月前
新英運輸株式会社
自動車用台車
2か月前
株式会社豊田自動織機
フォークリフト
4か月前
株式会社大林組
養生方法
9か月前
ウエダ産業株式会社
鋼板保持装置
11か月前
白山工業株式会社
腕重量補償機構
9か月前
中坪造園有限会社
吊り荷降ろし具
1か月前
有限会社サエキ
玉掛用器具
6か月前
フジテック株式会社
エスカレータ
3か月前
株式会社タダノ
高所作業車
9か月前
株式会社キトー
吊具
10か月前
株式会社タダノ
クレーン装置
6か月前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社スギヤス
車両整備用リフト
7か月前
株式会社スギヤス
車両整備用リフト
7か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ