TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082934
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196513
出願日
2023-11-20
発明の名称
牽引システム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B62D
13/00 20060101AFI20250523BHJP(鉄道以外の路面車両)
要約
【課題】通路の省スペース化を実現でき、走行経路に制約が生じる可能性を低減できる牽引システムを提供する。
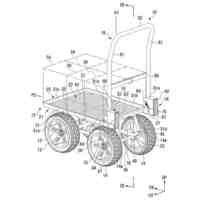
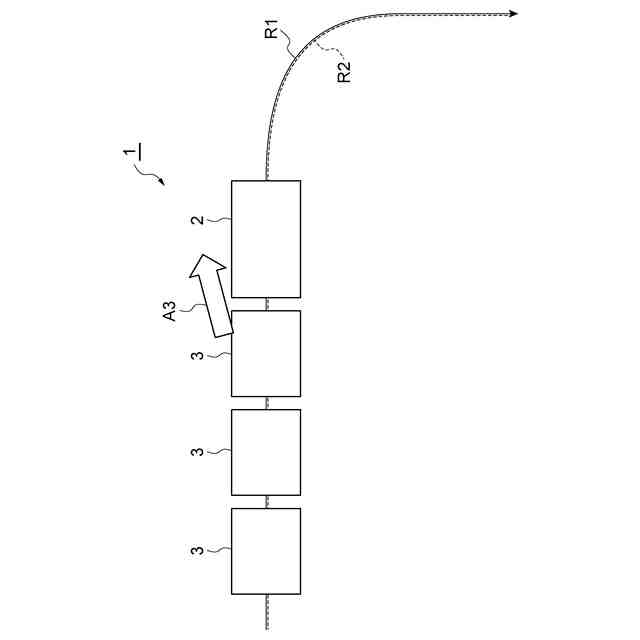
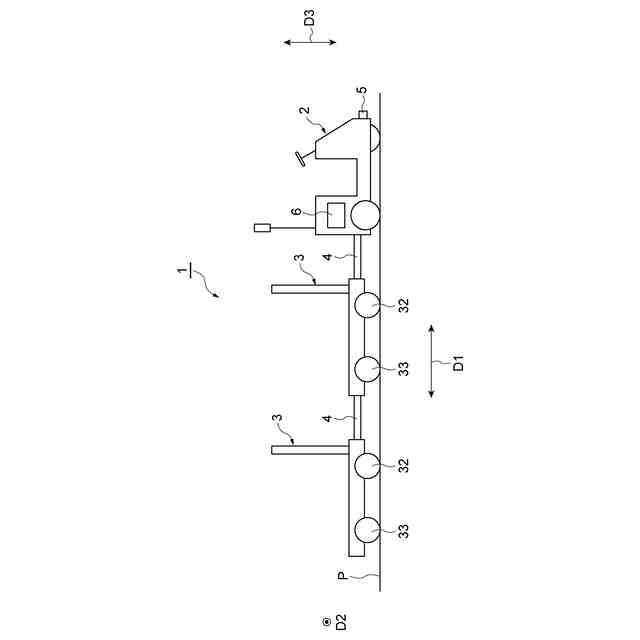
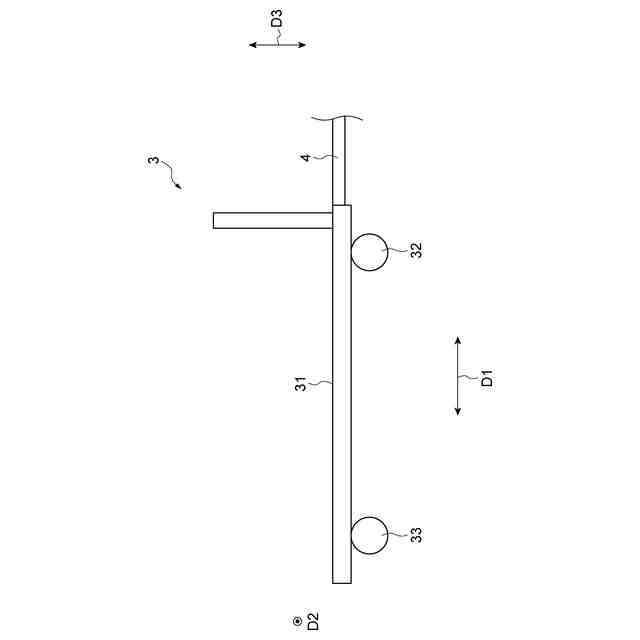
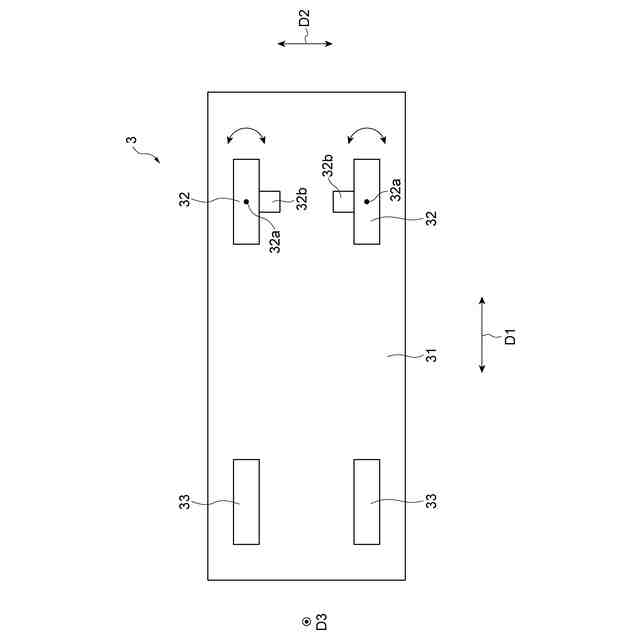
【解決手段】牽引システム1は、牽引車2と、牽引車2に牽引される被牽引車3と、被牽引車3の動作を制御する制御部6と、を備え、制御部6は、牽引車2の操舵角である牽引操舵角を取得し、牽引操舵角に基づいて、被牽引車3の操舵角である被牽引操舵角を制御する。
【選択図】図9
特許請求の範囲
【請求項1】
牽引車と、
牽引車に牽引される被牽引車と、
前記被牽引車の動作を制御する制御部と、を備え、
前記制御部は、
前記牽引車の操舵角である牽引操舵角を取得し、
前記牽引操舵角に基づいて、前記被牽引車の操舵角である被牽引操舵角を制御する、
牽引システム。
続きを表示(約 740 文字)
【請求項2】
前記制御部は、
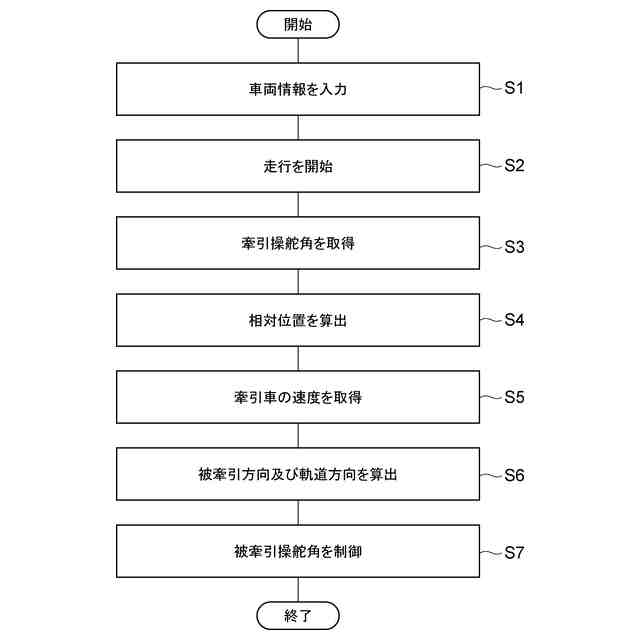
前記牽引車に対する前記被牽引車の相対位置を算出し、
前記相対位置に基づいて、前記被牽引操舵角を制御する、
請求項1に記載の牽引システム。
【請求項3】
前記制御部は、予め設定された前記牽引車及び前記被牽引車の前後方向の長さ、及び、予め設定された前記被牽引車の配列順に基づいて、前記相対位置を算出する、
請求項2に記載の牽引システム。
【請求項4】
前記制御部は、
前記牽引操舵角に基づいて、前記牽引車により前記被牽引車が牽引される被牽引方向と、前記牽引車の走行軌道に沿った軌道方向とを算出し、
前記被牽引方向及び前記軌道方向に基づいて、前記被牽引操舵角を制御する、
請求項1~3のいずれか一項に記載の牽引システム。
【請求項5】
前記制御部は、前記被牽引車の操舵方向を前記軌道方向に一致させるように前記被牽引操舵角を制御する、
請求項4に記載の牽引システム。
【請求項6】
前記制御部は、
前記牽引車の速度を取得し、
前記牽引車の速度に基づいて、前記被牽引操舵角を制御する、
請求項1~3のいずれか一項に記載の牽引システム。
【請求項7】
前記牽引車は、運転者の操作により走行する、
請求項1~3のいずれか一項に記載の牽引システム。
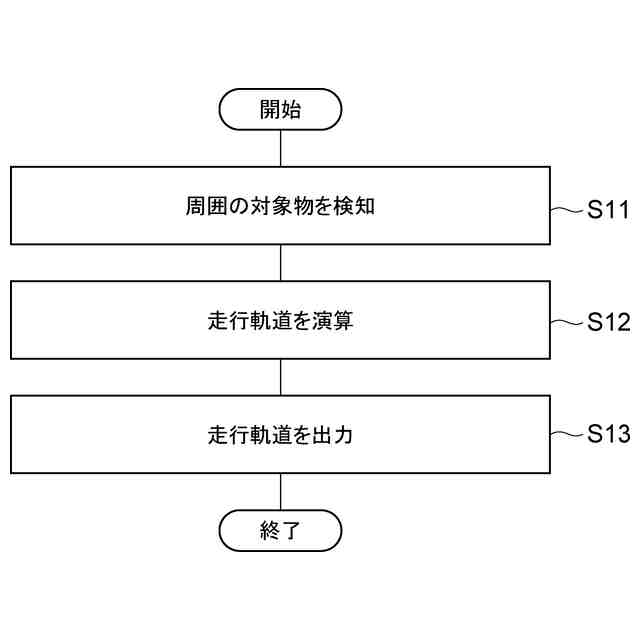
【請求項8】
前記牽引車の周囲の対象物を検知する検知部をさらに備え、
前記制御部は、前記検知部の検知結果に基づいて、前記牽引車の走行軌道を演算する、
請求項1~3のいずれか一項に記載の牽引システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、牽引システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
牽引車を用いて被牽引車を牽引する牽引システムに関する技術として、特許文献1に記載されたシステムが知られている。このシステムは、牽引車が単独走行であるか台車を牽引する牽引走行であるかに応じて牽引車の走行経路を探索する。走行経路は、牽引走行時に台車が障害物と干渉することなく走行可能な牽引時走行経路部と、単独走行時の単独走行経路部と、を含む。
【先行技術文献】
【特許文献】
【0003】
特開2022-114188号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
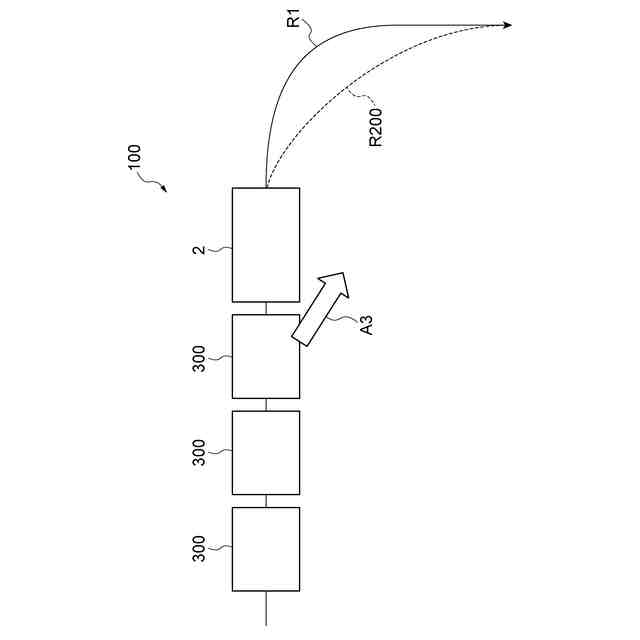
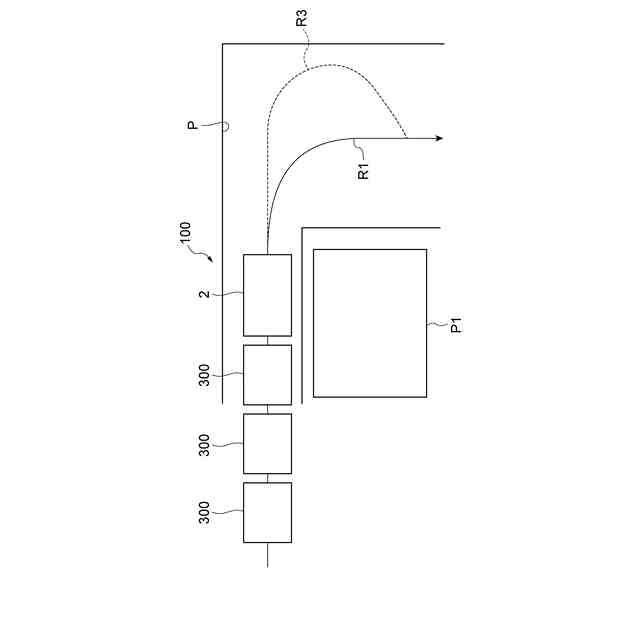
上記説明したシステムでは、牽引車が牽引走行を行うに際し、被牽引車(台車)が障害物と干渉することを防止するために単独走行経路部と比較して大回りの牽引時走行経路部を探索する。このため、被牽引車を牽引する牽引車が走行する場合、牽引車が単独で走行する場合と比較して幅広な通路が必要となる。したがって、通路として大きなスペースが必要となることに加え、牽引車及び被牽引車の走行経路に通路の幅に関する制約が生じる可能性があった。
【0005】
本開示は、通路の省スペース化を実現でき、走行経路に制約が生じる可能性を低減できる牽引システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
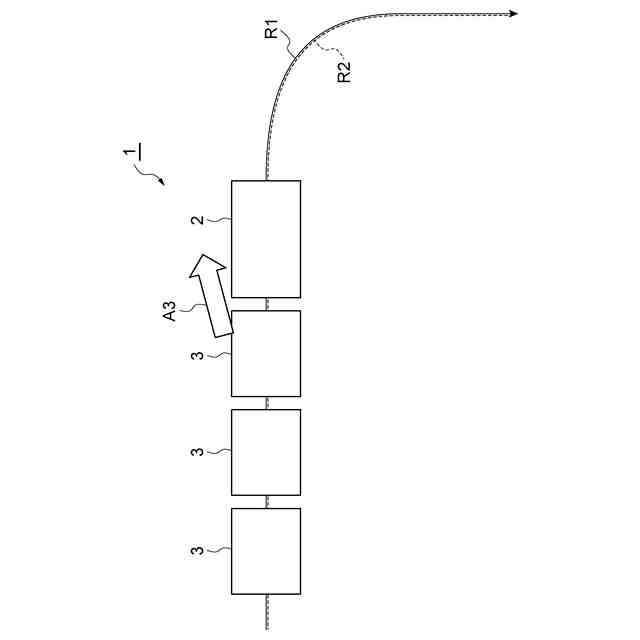
本開示の一態様に係る牽引システムは、牽引車と、牽引車に牽引される被牽引車と、被牽引車の動作を制御する制御部と、を備える。制御部は、牽引車の操舵角である牽引操舵角を取得する。制御部は、牽引操舵角に基づいて、被牽引車の操舵角である被牽引操舵角を制御する。
【0007】
この牽引システムでは、牽引車の牽引操舵角に基づいて、牽引車に牽引される被牽引車の被牽引操舵角を制御する。例えば、牽引車が屈曲した通路を走行したときに牽引操舵角に応じて被牽引操舵角を制御することで、被牽引車の走行軌道と牽引車の走行軌道とのずれを補正できる。被牽引車を牽引車の走行軌道に沿って走行させることができるので、例えば牽引車が屈曲した通路を走行するときに被牽引車が通路の壁と干渉することを防ぐために幅広な通路を走行する必要がなくなる。また、牽引車及び被牽引車の走行経路を探索するにあたり、通路の幅に関する制約が小さくなる。以上より、通路の省スペース化を実現でき、走行経路に制約が生じる可能性を低減できる。
【0008】
制御部は、牽引車に対する被牽引車の相対位置を算出してよい。制御部は、相対位置に基づいて、被牽引操舵角を制御してよい。この場合、牽引操舵角に加えて牽引車に対する被牽引車の相対位置を考慮して被牽引操舵角を制御する。これにより、被牽引車の走行軌道と牽引車の走行軌道とのずれを一層正確に補正できる。したがって、通路の省スペース化を一層確実に実現でき、走行経路に制約が生じる可能性を一層低減できる。
【0009】
制御部は、予め設定された牽引車及び被牽引車の前後方向の長さ、及び、予め設定された被牽引車の配列順に基づいて、相対位置を算出してよい。この場合、予め設定された値を用いて牽引車に対する被牽引車の相対位置を算出するので、当該相対位置を容易に算出できる。
【0010】
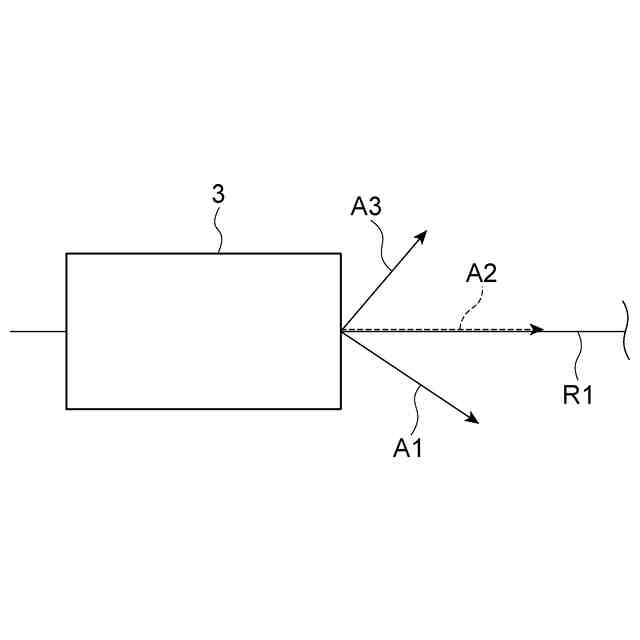
制御部は、牽引操舵角に基づいて、牽引車により被牽引車が牽引される被牽引方向と、牽引車の走行軌道に沿った軌道方向とを算出してよい。制御部は、被牽引方向及び軌道方向に基づいて、被牽引操舵角を制御してよい。この場合、例えば、被牽引車の走行方向を軌道方向に近づけるように被牽引車の被牽引操舵角を制御できる。これにより、被牽引車を一層正確に牽引車の走行軌道に沿って走行させることができる。したがって、通路の省スペース化を一層確実に実現でき、走行経路に制約が生じる可能性を一層低減できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
牽引システム
1日前
株式会社豊田自動織機
蓄電モジュール製造装置
4日前
株式会社豊田自動織機
内燃機関の点火制御装置及び内燃機関の点火制御方法
1日前
トヨタ自動車株式会社
電池の製造方法、及び、電池
1日前
トヨタ自動車株式会社
バイポーラ型電池の製造方法
8日前
株式会社豊田中央研究所
輪荷重推定装置、車両、プログラム及び輪荷重推定方法
2日前
個人
乗り物
22日前
個人
電動モビリティ
2か月前
個人
発音装置
2か月前
個人
折り畳み自転車
5か月前
個人
自転車用傘捕捉具
7か月前
個人
自由方向乗車自転車
2か月前
個人
自転車用荷台
10か月前
個人
体重掛けリフト台車
6か月前
個人
キャンピングトライク
4か月前
個人
アタッチメント
7か月前
個人
自転車用荷物台
6か月前
個人
ステアリングの操向部材
4か月前
個人
ステアリングの操向部材
9か月前
株式会社CPM
駐輪機
7か月前
株式会社三五
リアサブフレーム
5か月前
三甲株式会社
台車
9か月前
三甲株式会社
台車
9か月前
祖峰企画株式会社
平台車
11か月前
豊田合成株式会社
操舵装置
7か月前
ヤマハ発動機株式会社
車両
7か月前
ダイハツ工業株式会社
車両
8か月前
学校法人千葉工業大学
車両
5か月前
学校法人千葉工業大学
車両
5か月前
学校法人千葉工業大学
車両
5か月前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
株式会社カインズ
台車
5か月前
コンビ株式会社
乳母車
1か月前
株式会社カインズ
台車
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ