TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082763
公報種別
公開特許公報(A)
公開日
2025-05-29
出願番号
2023196314
出願日
2023-11-17
発明の名称
輪荷重推定装置、車両、プログラム及び輪荷重推定方法
出願人
株式会社豊田中央研究所
,
株式会社豊田自動織機
代理人
弁理士法人IPX
主分類
B60W
40/12 20120101AFI20250522BHJP(車両一般)
要約
【課題】輪荷重を推定する際に、従来よりも計算負荷を低減可能な輪荷重推定装置等を提供する。
【解決手段】本発明の一態様によれば、車両が具備する各車輪にかかる輪荷重を推定する輪荷重推定装置が提供される。この輪荷重推定装置は、取得部と、算出部と、推定部とを備える。取得部は、センサから出力された検出値をパラメータとして取得する。パラメータは、車両の運動に関するパラメータである。算出部は、パラメータと、車両の質量とに基づいて、車両に生じる慣性力を算出する。推定部は、慣性力と、所定の推定式とに基づいて、輪荷重を推定する。
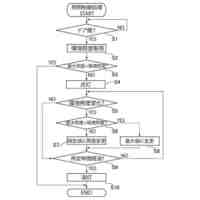
【選択図】図1
特許請求の範囲
【請求項1】
車両が具備する各車輪にかかる輪荷重を推定する輪荷重推定装置であって、
取得部と、算出部と、推定部とを備え、
前記取得部は、センサから出力された検出値をパラメータとして取得し、
前記パラメータは、前記車両の運動に関するパラメータであり、
前記算出部は、前記パラメータと、前記車両の質量とに基づいて、前記車両に生じる慣性力を算出し、
前記推定部は、前記慣性力と、所定の推定式とに基づいて、前記輪荷重を推定する、
輪荷重推定装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の輪荷重推定装置において、
前記パラメータは、前記車両の加速度、並びに、前記車両の3軸周りの角速度及び角加速度の少なくとも一方、を含む、
輪荷重推定装置。
【請求項3】
請求項2に記載の輪荷重推定装置において、
前記加速度は、前記車両の3軸方向の加速度である、
輪荷重推定装置。
【請求項4】
請求項1に記載の輪荷重推定装置において、
前記パラメータは、前記車両の車輪速度及び第1車輪加速度の少なくとも一方、前記車両のピッチ軸周りの角速度及び角加速度の少なくとも一方、並びに、前記車両のピッチ軸周りの姿勢角、を含む、
輪荷重推定装置。
【請求項5】
請求項4に記載の輪荷重推定装置において、
前記パラメータは、前記第1車輪加速度を含み、
前記算出部は、前記第1車輪加速度と、前記姿勢角とに基づいて、前記第1車輪加速度を補正した第2車輪加速度を算出し、
前記算出部は、前記第2車輪加速度と、前記質量とに基づいて、前記慣性力を算出する、
輪荷重推定装置。
【請求項6】
請求項5に記載の輪荷重推定装置において、
前記第2車輪加速度は、前記パラメータから算出される前記車両の傾斜方向と、重力加速度と、に基づいた成分に関する方向成分を前記第1車輪加速度に適用して、前記第1車輪加速度を補正したものである、
輪荷重推定装置。
【請求項7】
請求項1に記載の輪荷重推定装置において、
前記算出部は、前記車両の重心位置を算出し、
前記算出部は、前記重心位置と、前記質量とに基づいて、前記重心位置における慣性に関する慣性値を算出し、
前記推定部は、前記慣性値と、前記慣性力と、前記推定式とに基づいて、前記輪荷重を推定する、
輪荷重推定装置。
【請求項8】
請求項1に記載の輪荷重推定装置において、
前記取得部は、前記パラメータを連続的に取得し、
前記算出部は、連続的に取得された前記パラメータと、前記車両の質量とに基づいて、前記慣性力を連続的に算出し、
前記推定部は、連続的に算出された前記慣性力と、前記推定式とに基づいて、前記輪荷重を時系列で連続的に推定する、
輪荷重推定装置。
【請求項9】
車両であって、
請求項1から8までの何れか1項に記載の輪荷重推定装置と、判定部と、制限部とを備え、
前記輪荷重推定装置は、推定された前記輪荷重を出力し、
前記判定部は、前記推定された前記輪荷重と、参照情報とに基づいて、前記車両における運動の制限要否を判定し、
前記参照情報は、前記推定された前記輪荷重と、前記車両における運動の制限要否との関係を示す情報であり、
前記制限部は、前記車両における運動の制限が必要だと判定された場合、前記車両の運動を制限する、
車両。
【請求項10】
請求項9に記載の車両において、
さらに、フォークを備え、
前記車両は、フォークリフトである、
車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、輪荷重推定装置、車両、プログラム及び輪荷重推定方法に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1には、車両の現在の荷重を推定する方法が開示されている。
【0003】
この方法について説明する。フィルタ・バンクが異なる重量区分に対するフィルタを含み、各フィルタが、車両の現在の質量を推定するための車両モデルを実装する。車両の現在の走行状況を示す車両データと、それぞれの重量区分に固有のフィルタ・パラメータとに基づいて、各フィルタは、車両の現在の荷重のフィルタ固有の推定として荷重推定値を提供する。特許文献1には、次の(1)式が開示されている。
【0004】
JPEG
2025082763000002.jpg
5
164
【0005】
特許文献2には、車両の走行状態を示す量を決定するための方法が開示されている。
【0006】
この方法について説明する。路面横方向傾斜の場合に及び/又は車両のロール運動の場合に、ヨートルクコントロールの安定性又は良好な品質を保証するために、横方向傾斜の認識が必要である。これは横方向傾斜角度α
q
の演算によって行われる。横方向傾斜が認識されている場合、車両の計算装置は、横方向傾斜に対して大まかに作動するように設計することができる。横方向傾斜角度の演算は座標変換に基づいている。車両に固定された横方向加速度測定装置によって検出された値は、他のセンサ信号によって演算された、地球に関連する横方向加速度の値に対して、(2)式に従って関連づけられる。この式の解は横方向傾斜角度を生じる。
【0007】
JPEG
2025082763000003.jpg
7
164
【先行技術文献】
【特許文献】
【0008】
特表2011-505566号公報
特表2002-515972号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1及び2に開示された方法では、輪荷重を推定する際に複雑な計算をする必要があった。
【0010】
本発明では上記事情を鑑み、輪荷重を推定する際に、従来よりも計算負荷を低減可能な輪荷重推定装置等を提供することとした。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
3か月前
個人
車窓用防虫網戸
20日前
個人
警告装置
1か月前
個人
小型EVシステム
1か月前
個人
車輪清掃装置
3日前
日本精機株式会社
ケース
1か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
2か月前
日本精機株式会社
照明装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
株式会社松華
懸架装置
2か月前
個人
ブレーキシステム
2か月前
個人
ワイパーゴム性能保持具
12日前
井関農機株式会社
収穫作業車両
19日前
株式会社クラベ
ヒータユニット
18日前
個人
自動車ドア開度規制ベルト
1か月前
個人
ステージカー
2か月前
個人
自走式立体型洗車場
2か月前
横浜ゴム株式会社
タイヤ
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
株式会社ユーシン
照明装置
2か月前
マツダ株式会社
車両
2か月前
マツダ株式会社
車両
2か月前
株式会社ユーシン
照明装置
1か月前
日本精機株式会社
車両用表示装置
14日前
日本精機株式会社
車両用照明装置
3か月前
帝国繊維株式会社
作業車両
1か月前
日本精機株式会社
車両用表示装置
20日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ