TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081824
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023194846
出願日
2023-11-16
発明の名称
物体検出装置および物体検出装置が搭載される移動体
出願人
北陽電機株式会社
代理人
個人
主分類
G05D
1/245 20240101AFI20250521BHJP(制御;調整)
要約
【課題】移動体の直進方向の動きのみならず、旋回または回転方向の動きに対応して、より適切な監視領域に設定することができる物体検出装置を提供する。
【解決手段】移動体に搭載され、前記移動体に近接して設定される監視領域に向けて走査した測定光に対する反射光に基づいて前記監視領域へ進入する物体の有無を検出する物体検出装置であって、前記移動体に設置されたセンサからの信号を入力する信号入力部と、前記信号入力部に入力された信号から前記移動体の直進方向の速度と旋回または回転方向の角速度を算出する移動情報算出部と、前記移動情報算出部で算出された前記速度と前記角速度の組合せに基づいて前記監視領域を可変に設定する監視領域設定部と、前記監視領域への物体の進入を検出すると物体検出信号を出力する信号出力部と、を備えている。
【選択図】図3
特許請求の範囲
【請求項1】
移動体に搭載され、前記移動体に近接して設定される監視領域に向けて走査した測定光に対する反射光に基づいて前記監視領域へ進入する物体の有無を検出する物体検出装置であって、
前記移動体に設置されたセンサからの信号を入力する信号入力部と、
前記信号入力部に入力された信号から前記移動体の直進方向の速度と旋回または回転方向の角速度を算出する移動情報算出部と、
前記移動情報算出部で算出された前記速度と前記角速度の組合せに基づいて前記監視領域を可変に設定する監視領域設定部と、
前記監視領域への物体の進入を検出すると物体検出信号を出力する信号出力部と、
を備えている物体検出装置。
続きを表示(約 1,200 文字)
【請求項2】
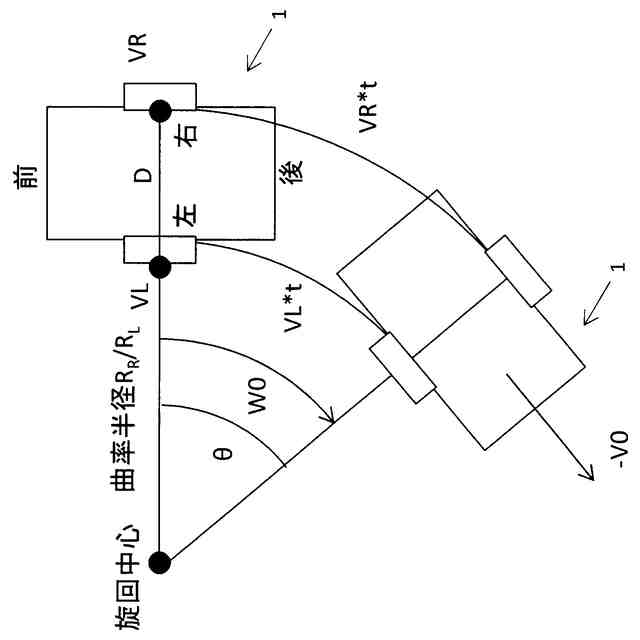
前記センサからの信号は、前記移動体の車幅方向に距離を隔てて配置され、其々独立して回転可能な左側車輪および右側車輪の各車軸に設置された一対の2相エンコーダからの信号であり、
前記移動情報算出部は、前記一対の2相エンコーダからの信号に基づいて得られる前記左側車輪および前記右側車輪の回転速度に基づいて前記移動体の前記速度と前記角速度を算出する、請求項1記載の物体検出装置。
【請求項3】
前記移動体が取り得る前記速度と前記角速度の組合せに基づいて可変に設定する前記監視領域を定めたテーブルデータを備え、前記監視領域設定部は前記移動情報算出部で算出された前記速度と前記角速度に基づいて前記テーブルデータを参照することにより前記監視領域を設定する、請求項1記載の物体検出装置。
【請求項4】
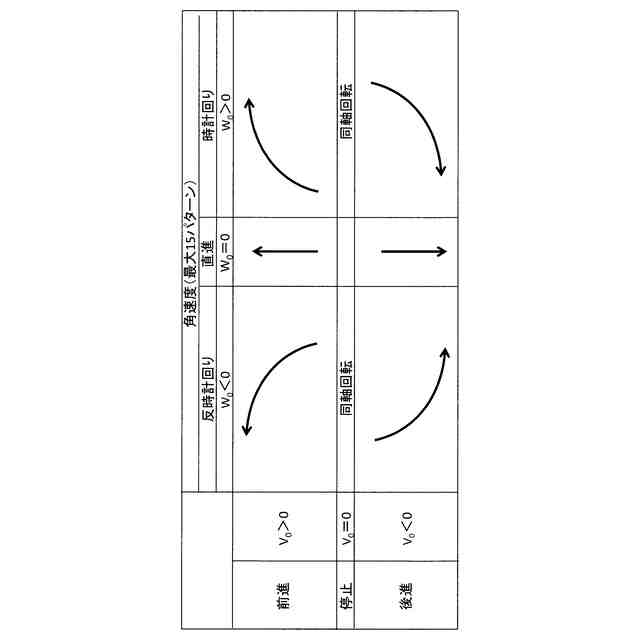
前記監視領域設定部は、ユーザーにより指定された前記移動体の前記速度と前記角速度を表示部に表示するとともに、前記表示部に表示した前記速度と前記角速度の組合せに対応した前記テーブルデータのデータセルに前記監視領域を設定することで前記テーブルデータを生成するGUIを備え、
前記GUIは、前記表示部に表示した前記速度と前記角速度の組合せに対応する前記移動体の進行方向を、前記ユーザーが観念的に認識可能な表示態様で表示する、請求項3記載の物体検出装置。
【請求項5】
前記GUIは、
前記ユーザーにより入力される前記移動体の左側車輪および右側車輪の回転速度に基づいて、前記移動体の前記速度と前記角速度を前記表示部に表示するとともに、対応する前記データセルを前記ユーザーが認識可能な表示態様で案内表示する第1モードと、
前記ユーザーにより指定される任意のデータセルに対応して前記移動体の前記速度と前記角速度を前記表示部に表示するとともに、前記移動体の左側車輪および右側車輪の回転速度を認識可能に表示する第2モードと、
を備え、前記テーブルデータを生成する際に、前記第1モードと前記第2モードの何れかを選択可能に構成されている、請求項4記載の物体検出装置。
【請求項6】
前記監視領域設定部は、所定の基準速度と基準角速度に対応して定めた基準監視領域に対して、前記基準速度に対する前記速度の比率と、前記基準角速度に対する前記角速度の比率に基づいて、前記基準監視領域を直進方向と旋回方向に拡大または縮小した領域を前記監視領域とする、請求項1記載の物体検出装置。
【請求項7】
請求項1から6の何れかに記載の物体検出装置が搭載され、前記信号出力部から出力される前記物体検出信号を入力する物体検出信号入力部を備えている、移動体。
【請求項8】
前記物体検出信号入力部に入力された前記物体検出信号に基づいて、前記移動体の前記速度および前記角速度を制御する走行制御部を備えている、請求項7記載の移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体に搭載され、前記移動体に近接して設定される監視領域に向けて走査した測定光に対する反射光に基づいて前記監視領域へ進入する物体の有無を検出する物体検出装置、および、物体検出装置が搭載される移動体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来からTOF(Time of Flight)方式やAM(amplitude modulation)方式を採用した測距装置が、無人搬送車(以下、「AGV(Automatic Guided Vehicle)」と記す。)などの移動体の視覚センサとして搭載されている。当該測距装置は、衝突事故などを未然に回避するために、移動体の進行方向に設定される監視領域への人の進入などを検出する物体検出装置として利用されている。
【0003】
TOF方式は、監視対象領域に向けて出力したパルス状のレーザ光である測定光と、測定光に対する物体からの反射光との検出時間差Δtに基づいて、測距装置から監視対象領域内に存在する物体までの距離Dを算出する方式で、以下の数式を用いて距離Dが算出される。尚、式中、Cは光速である。
D=Δt・C/2
【0004】
AM方式は、測定光が振幅変調され、監視対象領域に向けて出力した測定光と、測定光に対する物体からの反射光との位相差Δφに基づいて、測距装置から監視対象領域内に存在する物体までの距離Dを算出する方式で、以下の数式を用いて距離Dが算出される。尚、式中、Cは光速、fは変調周波数である。
D=Δφ・C/(4π・f)
【0005】
特許文献1には複数台のAGVが走行する場合に、各AGVの走行状態に基づいて最適な監視領域を可変設定可能にして、車間距離を短くできるレーザセンサが開示されている。
【0006】
当該レーザセンサは、移動体に搭載され、監視領域に向けて走査した測定光に対する反射光に基づいて前記監視領域への進入体の有無を検知するレーザセンサであって、前記移動体に搭載された速度センサからの信号を入力する信号入力部と、前記信号入力部に入力された信号から前記移動体の速度及び加速度を算出する移動情報算出部と、前記移動情報算出部で算出された速度及び加速度に基づいて前記監視領域を可変に設定する監視領域設定部と、前記監視領域への進入体を検知すると進入体検知信号を出力する信号出力部と、を備えている。
【先行技術文献】
【特許文献】
【0007】
特開2015-230527号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、特許文献1に記載されたレーザセンサでは、移動情報算出部が移動体の直進方向の速度と加速度を検出するように構成されているため、移動体が左右何れかに旋回または回転する場合に適切な管理領域に切替えることができないという課題があった。
【0009】
本発明の目的は、上述した問題点に鑑み、移動体の直進方向の動きのみならず、旋回または回転方向の動きに対応して、より適切な監視領域に設定することができる物体検出装置、および、物体検出装置が搭載される移動体を提供する点にある。
【課題を解決するための手段】
【0010】
上述の目的を達成するため、本発明による物体検出装置の第一の特徴構成は、移動体に搭載され、前記移動体に近接して設定される監視領域に向けて走査した測定光に対する反射光に基づいて前記監視領域へ進入する物体の有無を検出する物体検出装置であって、前記移動体に設置されたセンサからの信号を入力する信号入力部と、前記信号入力部に入力された信号から前記移動体の直進方向の速度と旋回または回転方向の角速度を算出する移動情報算出部と、前記移動情報算出部で算出された前記速度と前記角速度の組合せに基づいて前記監視領域を可変に設定する監視領域設定部と、前記監視領域への物体の進入を検出すると物体検出信号を出力する信号出力部と、を備えている点にある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
北陽電機株式会社
物体検知装置および物体検知方法
2か月前
北陽電機株式会社
反射ミラー部材、光電センサ、および光測距装置
16日前
北陽電機株式会社
反射ミラー部材、光電センサ、および光測距装置
16日前
北陽電機株式会社
物体検出装置および物体検出装置が搭載される移動体
7日前
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
トヨタ自動車株式会社
ペダル機構
12日前
株式会社ダイフク
搬送設備
13日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
22日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
20日前
株式会社やまびこ
走行制御装置
1か月前
株式会社タブチ
減圧弁
1か月前
WHILL株式会社
電動モビリティ
21日前
株式会社計数技研
移動体、及びプログラム
13日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
20日前
ローム株式会社
半導体装置
1日前
日本信号株式会社
自走式装置
27日前
井関農機株式会社
作業車両
1か月前
株式会社デンソー
診断装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
5日前
株式会社ダイヘン
移動体、及び誘導線検出装置
5日前
ローム株式会社
バイアス回路
1か月前
株式会社アイシン
自律移動体
27日前
株式会社アイシン
自律移動体
27日前
株式会社アイシン
自律移動体
27日前
株式会社アイシン
自律移動体
27日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ