TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040741
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147726
出願日
2023-09-12
発明の名称
物体検知装置および物体検知方法
出願人
北陽電機株式会社
代理人
個人
主分類
G01S
7/34 20060101AFI20250317BHJP(測定;試験)
要約
【課題】軽い演算負荷で対処できる安価で精度の良い物体検知装置を提供する。
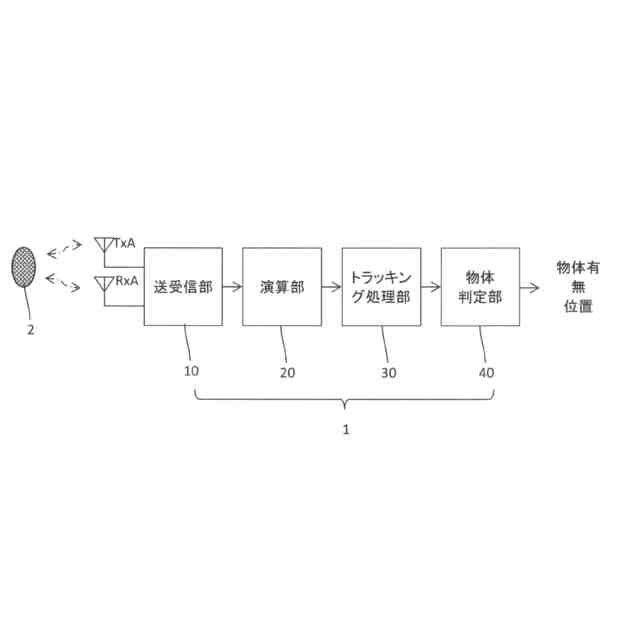
【解決手段】移動体に設置された送受信部と、送信波と受信波をミキシングしたIF信号に基づいて、少なくとも物体の位置を算出する演算部と、演算部で算出された物体の位置をチャープ周期Tの整数N倍となるフレームを単位時間として平均処理したフレーム平均位置を物体の位置として、3次元空間を投影した所定の二次元平面に区画される複数のセルのうち、対応するセルおよびその周辺のセルに拡張して割り付ける一連の処理を、所定の繰返し回数Mだけ繰り返すトラッキング処理部と、トラッキング処理部でフレーム平均位置が割り付けられたセルのうち、複数のフレームで重複して割り付けられた回数が所定の閾値以上となるセルが存在するときに、前記物体を検知したと判定する物体判定部と、を備えている。
【選択図】図6
特許請求の範囲
【請求項1】
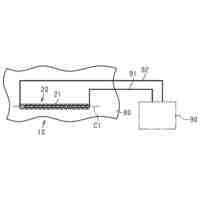
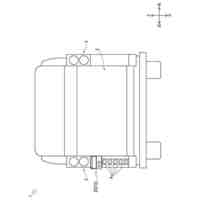
移動体に設置され、3次元空間にチャープ信号を送信する送信アンテナと、物体から反射されたチャープ信号を受信する受波アンテナを備えた送受信部と、
前記送信アンテナから送信したチャープ信号と前記受信アンテナで受信したチャープ信号をミキシングしたIF信号に基づいて、少なくとも前記物体の位置を算出する演算部と、
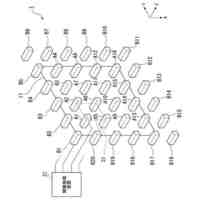
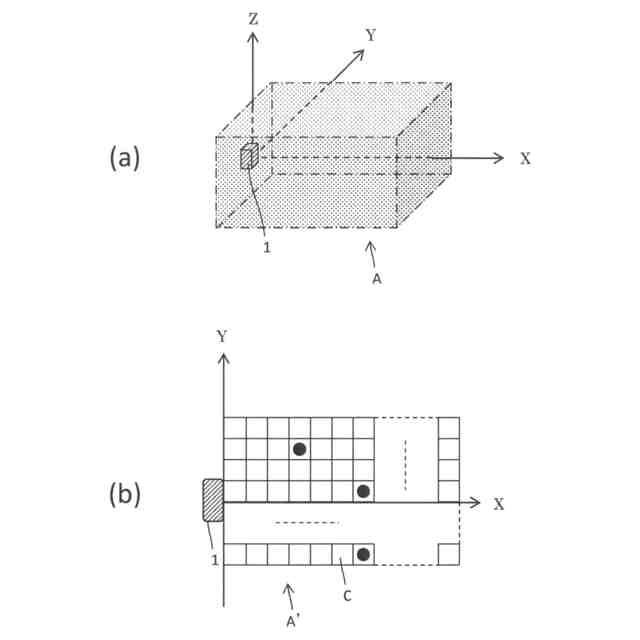
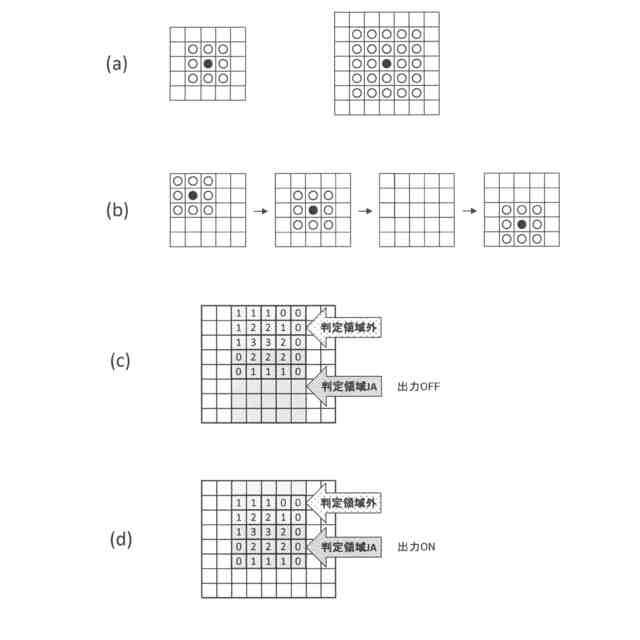
前記演算部で算出された前記物体の位置をチャープ周期Tの整数N倍となるフレームを単位時間(T・N)として平均処理したフレーム平均位置を物体の位置として、前記3次元空間を投影した所定の二次元平面に区画される複数のセルのうち、対応するセルおよびその周辺のセルに拡張して割り付ける一連の処理を、所定の繰返し回数Mだけ繰り返すトラッキング処理部と、
前記トラッキング処理部で前記フレーム平均位置が割り付けられたセルのうち、複数のフレームで重複して割り付けられた回数が所定の閾値以上となるセルが存在するときに、前記物体を検知したと判定する物体判定部と、
を備え、
前記2次元平面に区画される前記セルのサイズは、前記フレームを単位とする前記物体の相対移動距離の最大値Lと、前記物体の計測誤差δとに基づいて設定され、前記フレーム平均位置を割り付ける前記セルの拡張範囲は、前記繰返し回数Mに基づいて設定されている物体検知装置。
続きを表示(約 1,500 文字)
【請求項2】
前記2次元平面に区画される複数のセルと少なくとも一部が重畳し、前記3次元空間に画定される3次元検知領域を前記2次元平面に投影した判定領域を設定する判定領域設定部をさらに備え、
前記物体判定部は、前記判定領域に含まれる前記セルのうち、前記フレーム平均位置が重複して割り付けられる回数が所定の閾値以上となるセルが存在するときに、前記3次元検知領域に物体が存在すると判定し、物体判定信号を出力する、請求項1記載の物体検知装置。
【請求項3】
前記セルのサイズは、一辺の長さが(L×M+2×δ)/Mの矩形の領域として規定される、請求項1記載の物体検知装置。
【請求項4】
前記フレーム平均位置を割り付ける前記セルの範囲は、前記セルを前記繰返し回数Mだけ縦横に拡張した矩形の領域に設定されている、請求項1記載の物体検知装置。
【請求項5】
前記送受信部で送受信されるチャープ信号はFMCW方式を採用したミリ波である、請求項1から4の何れかに記載の物体検知装置。
【請求項6】
移動体に設置された送受信部の送信アンテナから3次元空間に送信したチャープ信号と、物体から反射されて前記送受信部の受信アンテナにより受信されたチャープ信号をミキシングしたIF信号に基づいて、少なくとも前記物体の位置を算出する演算ステップと、
前記演算ステップで算出された前記物体の位置をチャープ周期Tの整数N倍となるフレームを単位時間(T・N)として平均処理したフレーム平均位置を物体の位置として、前記3次元空間を投影した所定の二次元平面に区画される複数のセルのうち、対応するセルおよびその周辺のセルに拡張して割り付ける一連の処理を、所定の繰返し回数Mだけ繰り返すトラッキング処理ステップと、
前記トラッキング処理ステップで前記フレーム平均位置が割り付けられたセルのうち、複数のフレームで重複して割り付けられた回数が所定の閾値以上となるセルが存在するときに、前記物体を検知したと判定する物体判定ステップと、
を備え、
前記2次元平面に区画される前記セルのサイズは、前記フレームを単位とする前記物体の相対移動距離の最大値Lと、前記物体の計測誤差δとに基づいて設定され、前記フレーム平均位置を割り付ける前記セルの範囲は、前記繰返し回数Mに基づいて設定されている物体検知方法。
【請求項7】
前記2次元平面に区画される複数のセルと少なくとも一部が重畳し、前記3次元空間に画定される3次元検知領域を前記2次元平面に投影した判定領域を設定する判定領域設定ステップをさらに備え、
前記物体判定ステップは、前記判定領域に含まれる前記セルのうち、前記フレーム平均位置が重複して割り付けられる回数が所定の閾値以上となるセルが存在するときに、前記3次元検知領域に物体が存在すると判定し、物体判定信号を出力する、請求項6記載の物体検知方法。
【請求項8】
前記セルのサイズは、一辺の長さが(L×M+2×δ)/Mの矩形の領域として規定される、請求項6記載の物体検知方法。
【請求項9】
前記フレーム平均位置を割り付ける前記セルの範囲は、前記セルを前記繰返し回数Mだけ縦横に拡張した矩形の領域に設定されている、請求項1記載の物体検知方法。
【請求項10】
前記送受信部で送受信されるチャープ信号はFMCW方式を採用したミリ波である、請求項6から9の何れかに記載の物体検知方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、レーダ装置を用いた物体検知装置および物体検知方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
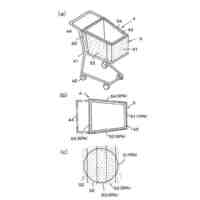
建設機械、農業機械、AMR(Autonomous Mobile Robot)などの屋外で使用する移動体には、衝突防止のための物体検知装置が搭載されている。このような移動体の走行方向にいる人などの障害物を検知して、運転者に移動体の減速要求や停止要求を警告灯で報知するとともに、運転者の操作が遅れて衝突の虞がある場合に、移動体に備えた走行制御装置により自動的に制動制御して移動体を停止させる必要がある。
【0003】
このような目的に使用されるセンサとして超音波センサ、画像センサ、レーザセンサ、レーダセンサなどがあるが、野外で使用する場合には高い耐候性が要求される。
【0004】
画像センサやレーザセンサは、分解能や精度に優れるが太陽光や雨や雪や霧といった厳しい気象条件下で誤動作の確率が高くなる。超音波センサは、安価であるが検出距離が短いため、移動体の障害物センサに使用するのは困難である。耐候性という観点ではレーダセンサが優れているが、物体検出の安定性が低く、精度が悪い。
【0005】
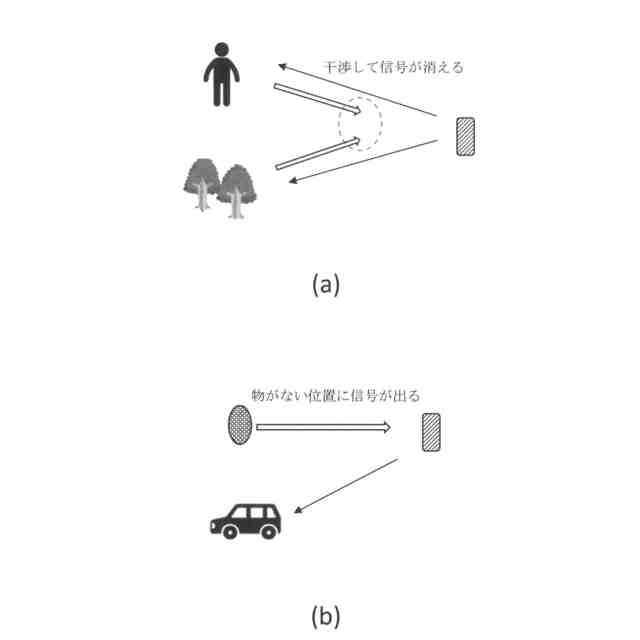
例えば、ミリ波を用いたレーダセンサでは、送信波と反射波とをミキシング処理したIF信号に基づいて移動体の移動方向における障害物の位置や相対速度を求めることができるのであるが、障害物と周辺の反射物からの反射波の干渉により障害物が消失したり、検出領域から外れた領域に存在する強反射物からの反射波に対する方位演算エラーにより、障害物の存在しない方向に障害物が現れたりするなどの不都合な事態が生じる場合がある。
【0006】
特許文献1には、時系列でのレーダの反射データが不安定な場合でも物体を高精度に検出することができる物体検出装置が開示されている。
当該物体検出装置は、レーダ検出手段で検出された反射データをセグメントにグルーピングし、セグメント毎の反射データに基づいて物体を検出する物体検出装置であって、所定の条件に基づいて反射データをセグメントにグルーピングするグルーピング手段と、各反射データについて過去に属したセグメントの識別情報を特定するセグメント履歴特定手段と、今回グルーピングされたセグメントに属する反射データの過去のセグメントの識別情報に基づいて、今回グルーピングされたセグメントと過去にグルーピングされたセグメントとの同一性を判別するセグメント識別手段とを備えている。
【先行技術文献】
【特許文献】
【0007】
特開2010-266225号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、上述した物体検出装置では、セグメントに識別情報を付与し、識別情報に基づいて同一性を判定する処理に要する演算負荷が重く、高価なCPUを用いた高性能の演算回路が必要となるので、比較的低速で走行する移動体に搭載でき、安価で汎用性のある物体検知装置が望まれていた。
【0009】
本発明の目的は、上述した課題に鑑み、軽い演算負荷で対処できる安価で精度の良い物体検知装置および物体検知方法を提供する点にある。
【課題を解決するための手段】
【0010】
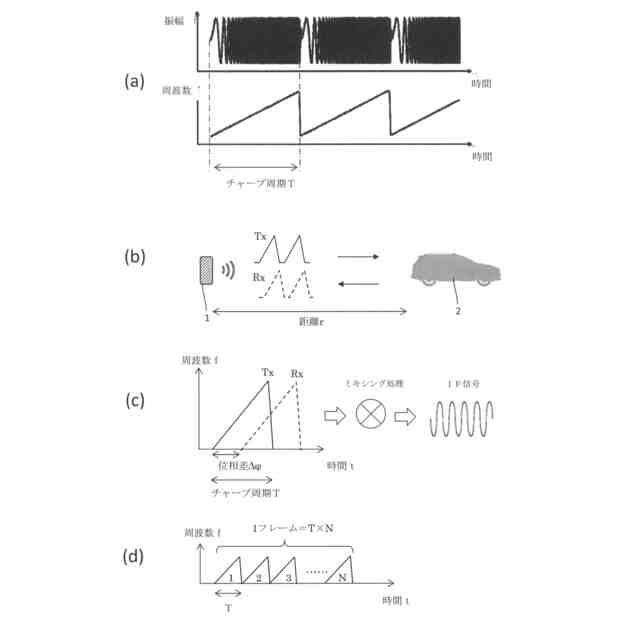
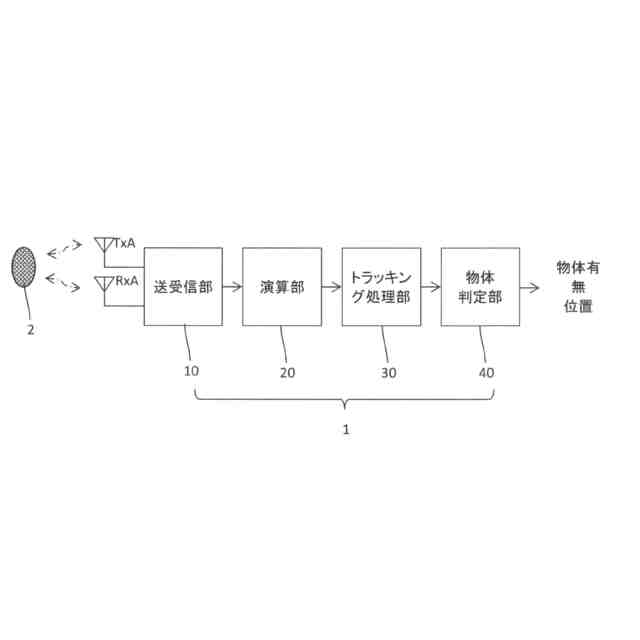
上述の目的を達成するため、本発明による物体検知装置の第一の特徴構成は、移動体に設置され、3次元空間にチャープ信号を送信する送信アンテナと、物体から反射されたチャープ信号を受信する受波アンテナを備えた送受信部と、前記送信アンテナから送信したチャープ信号と前記受信アンテナで受信したチャープ信号をミキシングしたIF信号に基づいて、少なくとも前記物体の位置を算出する演算部と、前記演算部で算出された前記物体の位置をチャープ周期Tの整数N倍となるフレームを単位時間(T・N)として平均処理したフレーム平均位置を物体の位置として、前記3次元空間を投影した所定の二次元平面に区画される複数のセルのうち、対応するセルおよびその周辺のセルに拡張して割り付ける一連の処理を、所定の繰返し回数Mだけ繰り返すトラッキング処理部と、前記トラッキング処理部で前記フレーム平均位置が割り付けられたセルのうち、複数のフレームで重複して割り付けられた回数が所定の閾値以上となるセルが存在するときに、前記物体を検知したと判定する物体判定部と、を備え、前記2次元平面に区画される前記セルのサイズは、前記フレームを単位とする前記物体の相対移動距離の最大値Lと、前記物体の計測誤差δとに基づいて設定され、前記フレーム平均位置を割り付ける前記セルの拡張範囲は、前記繰返し回数Mに基づいて設定されている点にある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
北陽電機株式会社
物体検知装置および物体検知方法
1か月前
北陽電機株式会社
反射ミラー部材、光電センサ、および光測距装置
4日前
北陽電機株式会社
反射ミラー部材、光電センサ、および光測距装置
4日前
株式会社イシダ
計量装置
23日前
日本精機株式会社
表示装置
9日前
株式会社エビス
水準器
8日前
日本精機株式会社
アセンブリ
15日前
個人
準結晶の解析方法
15日前
株式会社豊田自動織機
自動走行体
14日前
個人
浸透探傷試験方法
4日前
株式会社不二越
塵埃噴射装置
3日前
日本碍子株式会社
ガスセンサ
8日前
トヨタ自動車株式会社
検査装置
23日前
株式会社東芝
センサ
3日前
トヨタ自動車株式会社
制御装置
4日前
GEE株式会社
光学特性測定装置
14日前
日本特殊陶業株式会社
ガスセンサ
15日前
日本特殊陶業株式会社
ガスセンサ
3日前
日本特殊陶業株式会社
ガスセンサ
2日前
TDK株式会社
アレイセンサ
4日前
株式会社不二越
X線測定装置
9日前
株式会社不二越
X線測定装置
9日前
株式会社TISM
センサ部材
14日前
株式会社小糸製作所
物体検知システム
15日前
TDK株式会社
計測装置
9日前
大和製衡株式会社
表示システム
21日前
リバークル株式会社
荷重移動試験装置
23日前
個人
簡易・迅速タンパク質検出装置および方法
4日前
エスペック株式会社
温度槽及び試験方法
10日前
栗田工業株式会社
水処理システム
7日前
TDK株式会社
温度センサ
7日前
大和ハウス工業株式会社
引張装置
22日前
株式会社イシダ
X線検査装置
23日前
Astemo株式会社
電子制御装置
11日前
株式会社イシダ
搬送装置
21日前
トヨタ自動車株式会社
音源推定方法
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ