TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025080838
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194166
出願日
2023-11-15
発明の名称
無人搬送車および無人搬送車システム
出願人
シーオス株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250520BHJP(制御;調整)
要約
【課題】搬送用台車にマーカーを付さなくても、搬送用台車の連結箇所を特定し、搬送用台車に適切に連結することができる無人搬送車および無人搬送車システムを提供する。
【解決手段】搬送用台車40を目的地まで自動で搬送する無人搬送車10であって、搬送用台車40に連結するための連結装置と、搬送用台車40を撮像するカメラと、レーザー光を照射および受光して搬送用台車の距離および形状を測定する測距センサと、制御部と、を有し、制御部は、カメラの撮像画像に基づいて対象となる搬送用台車の形状を認識する機能と、測距センサの測定データに基づいて対象となる搬送用台車の連結箇所を特定する機能と、連結箇所と連結装置が所望の相対角度となるように無人搬送車10を移動させる機能と、連結箇所に前記連結装置を連結して搬送用台車10を目的地まで搬送する機能と、目的地で連結装置の連結を解除する機能と、を備える、無人搬送車。
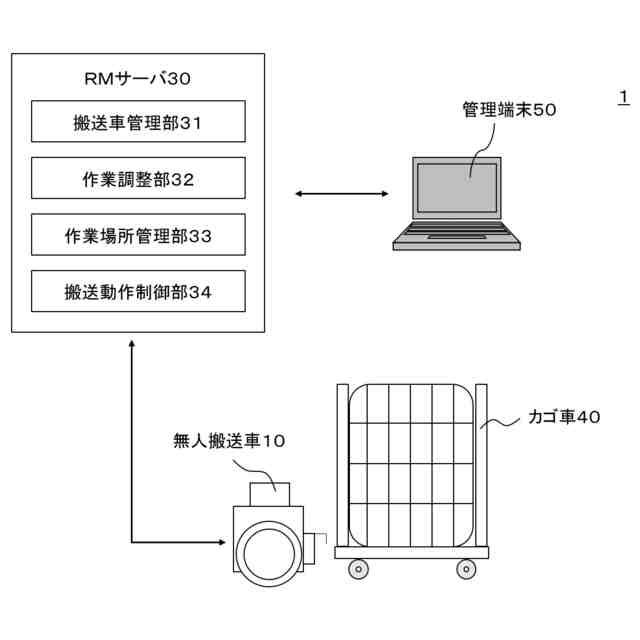
【選択図】図1
特許請求の範囲
【請求項1】
搬送用台車を目的地まで自動で搬送する無人搬送車であって、
前記搬送用台車に連結するための連結装置と、
搬送用台車を撮像するカメラと、
レーザー光を照射および受光して搬送用台車の距離および形状を測定する測距センサと、
制御部と、を有し、
前記制御部は、前記カメラの撮像画像に基づいて対象となる搬送用台車の形状を認識する台車形状認識機能と、前記測距センサの測定データに基づいて前記対象となる搬送用台車の連結箇所を特定する連結位置特定機能と、前記連結箇所と前記連結装置が所望の相対角度となるように前記無人搬送車を移動させる相対位置調整機能と、前記連結箇所に前記連結装置を連結して前記搬送用台車を目的地まで搬送する連結搬出機能と、前記目的地で前記連結装置の連結を解除するリリース機能と、を備える、無人搬送車。
続きを表示(約 1,300 文字)
【請求項2】
前記制御部は、フッキングエリアを含むマップ情報を記憶しており、
前記測距センサの測定結果に基づいて前記フッキングエリアに前記対象となる搬送用台車が存在するか否かを検出する対象台車検出機能をさらに備える、請求項1に記載の無人搬送車。
【請求項3】
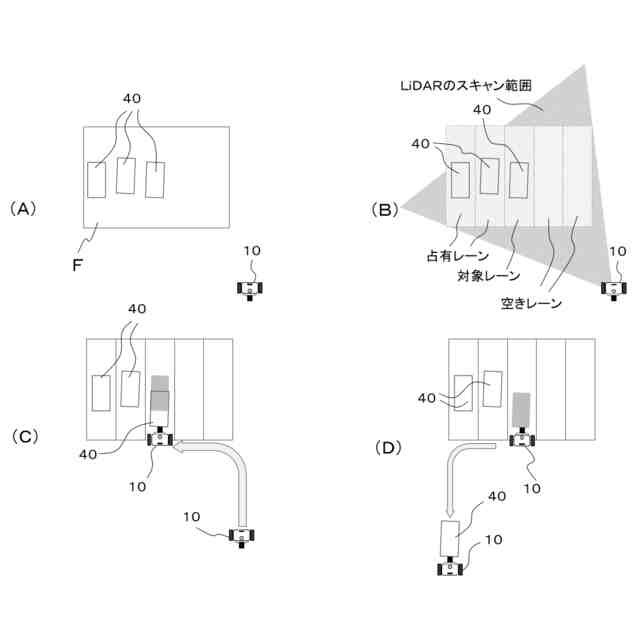
前記制御部の対象台車検出機能は、所定のフッキングエリアに配置された搬送用台車をフッキングする場合、前記フッキングエリアを複数のレーンに分割し、前記レーンのうち、前記搬送用台車が存在するレーンのうちの1つを対象となる搬送用台車が存在する対象レーンに設定する、請求項2に記載の無人搬送車。
【請求項4】
前記制御部の台車形状認識機能は、前記カメラで撮像した画像を画像認識処理して前記搬送用台車の立体矩形領域を算出する機能を有し、
前記制御部の相対位置調整機能は、前記算出した前記立体矩形領域と、前記測距センサの測定データとに基づいて、前記搬送用台車の連結面と、当該連結面における前記連結箇所とを特定することで、前記搬送用台車に対する前記無人搬送車の相対角度を調整する、請求項1に記載の無人搬送車。
【請求項5】
前記カメラで撮像した画像は、3次元画像であり、
前記測距センサの測定データは、点群データである、請求項4に記載の無人搬送車。
【請求項6】
前記カメラが、ステレオカメラであり、
前記測距センサが、全方位LiDARである、請求項5に記載の無人搬送車。
【請求項7】
前記制御部は、リリースエリアを含むマップ情報を記憶しており、
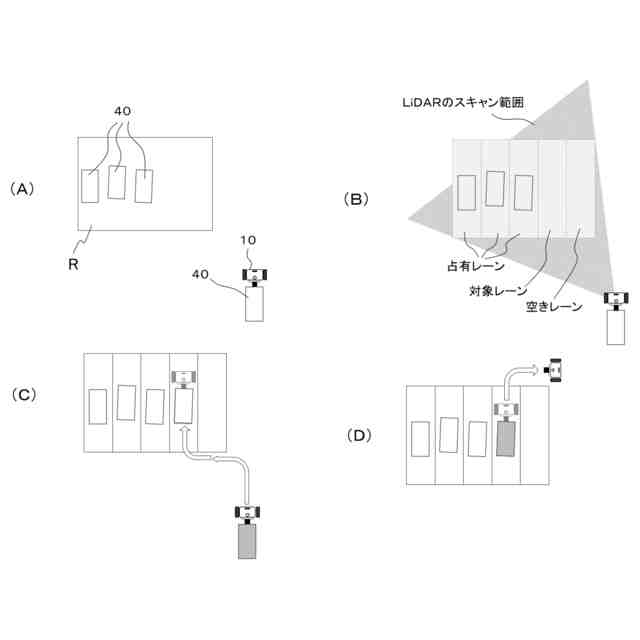
前記制御部のリリース機能は、所定のリリースエリアに搬送用台車をリリースする場合、前記リリースエリアを複数のレーンに分割し、前記レーンのうち、前記搬送用台車が存在しないレーンのうちの1つを前記目的地に設定する、請求項1に記載の無人搬送車。
【請求項8】
前記連結装置が、前記連結箇所に係合するフックと、前記連結箇所に当接する当接面と、前記フックを駆動する駆動装置と、を備える請求項1に記載の無人搬送車。
【請求項9】
さらに、外部のサーバから前記搬送用台車の車種情報および車種別の連結箇所情報を含む制御情報を受信する無線通信装置を備え、
前記台車形状認識機能は、前記制御情報および前記カメラの撮像画像に基づいて対象となる搬送用台車の形状を認識し、
前記連結位置特定機能は、前記制御情報および前記測距センサの測距結果に基づいて前記対象となる搬送用台車の連結箇所を特定する請求項1ないし8のいずれかに記載の無人搬送車。
【請求項10】
請求項9に記載の無人搬送車と通信可能に構成されたサーバであって、
前記台車形状認識機能で用いられる前記搬送用台車の車種情報および前記連結位置特定機能で用いられる前記搬送用台車の車種別の連結箇所情報を前記無人搬送車に送信するサーバ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、カゴ車などの搬送用台車に自動で連結し、目的地まで搬送用台車を搬送する無人搬送車および無人搬送車システムに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、カゴ車に自動で連結し、目的地までカゴ車を搬送する無人搬送車が知られている。たとえば、特許文献1では、カゴ車にマーカー(たとえばQRコード(登録商標))を付し、無人搬送機がそのマーカーを認識することで、カゴ車の連結箇所を特定し、特定した連結箇所に連結する構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許7151924号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、それぞれのカゴ車にマーカーを付す必要があり、また、カゴ車を搬送した後は、マーカーをカゴ車から取り外し、新たに搬送するカゴ車にマーカーを取り付ける作業が必要となり、カゴ車の数が増加するほど、作業者の手間が増大してしまうという問題があった。
【0005】
本発明は、カゴ車は始めとする搬送用台車にマーカーを付さなくても、搬送用台車の連結箇所を特定し、搬送用台車に適切に連結することができる、無人搬送車および無人搬送車システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る無人搬送車は、搬送用台車を目的地まで自動で搬送する無人搬送車であって、前記搬送用台車に連結するための連結装置と、搬送用台車を撮像するカメラと、レーザー光を照射および受光して搬送用台車の距離および形状を測定する測距センサと、制御部と、を有し、前記制御部は、前記カメラの撮像画像に基づいて対象となる搬送用台車の形状を認識する台車形状認識機能と、前記測距センサの測定データに基づいて前記対象となる搬送用台車の連結箇所を特定する連結位置特定機能と、前記連結箇所と前記連結装置が所望の相対角度となるように前記無人搬送車を移動させる相対位置調整機能と、前記連結箇所に前記連結装置を連結して前記搬送用台車を目的地まで搬送する連結搬出機能と、前記目的地で前記連結装置の連結を解除するリリース機能と、を備える。
上記無人搬送車において、前記制御部は、フッキングエリアを含むマップ情報を記憶しており、前記測距センサの測定結果に基づいて前記フッキングエリアに前記対象となる搬送用台車が存在するか否かを検出する対象台車検出機能をさらに備える構成とすることができる。
上記無人搬送車において、前記制御部の対象台車検出機能は、所定のフッキングエリアに配置された搬送用台車をフッキングする場合、前記フッキングエリアを複数のレーンに分割し、前記レーンのうち、前記搬送用台車が存在するレーンのうちの1つを対象となる搬送用台車が存在する対象レーンに設定する構成とすることができる。
上記無人搬送車において、前記制御部の台車形状認識機能は、前記カメラで撮像した画像を画像認識処理して前記搬送用台車の立体矩形領域を算出する機能を有し、前記制御部の相対位置調整機能は、前記算出した前記立体矩形領域と、前記測距センサの測定データとに基づいて、前記搬送用台車の連結面と、当該連結面における前記連結箇所とを特定することで、前記搬送用台車に対する前記無人搬送車の相対角度を調整する構成とすることができる。
上記無人搬送車において、前記カメラで撮像した画像は、3次元画像であり、前記測距センサの測定データは、点群データである構成とすることができる。
上記無人搬送車において、前記カメラが、ステレオカメラであり、前記測距センサが、全方位LiDARである構成とすることができる。
上記無人搬送車において、前記制御部は、リリースエリアを含むマップ情報を記憶しており、前記制御部のリリース機能は、所定のリリースエリアに搬送用台車をリリースする場合、前記リリースエリアを複数のレーンに分割し、前記レーンのうち、前記搬送用台車が存在しないレーンのうちの1つを前記目的地に設定する、構成とすることができる。
上記無人搬送車において、前記連結装置が、前記連結箇所に係合するフックと、前記連結箇所に当接する当接面と、前記フックを駆動する駆動装置と、を備える構成とすることができる。
上記無人搬送車において、さらに、外部のサーバから前記搬送用台車の車種情報および車種別の連結箇所情報を含む制御情報を受信する無線通信装置を備え、前記台車形状認識機能は、前記制御情報および前記カメラの撮像画像に基づいて対象となる搬送用台車の形状を認識し、前記連結位置特定機能は、前記制御情報および前記測距センサの測距結果に基づいて前記対象となる搬送用台車の連結箇所を特定する構成とすることができる。
本発明に係るサーバは、上記無人搬送車と通信可能に構成されたサーバであって、前記台車形状認識機能で用いられる前記搬送用台車の車種情報および前記連結位置特定機能で用いられる前記搬送用台車の車種別の連結箇所情報を前記無人搬送車に送信する。
本発明に係る管理端末は、上記サーバと通信可能に構成された管理端末であって、前記台車形状認識機能で用いられる前記搬送用台車の車種情報および前記連結位置特定機能で用いられる前記搬送用台車の車種別の連結箇所情報を前記サーバに送信する。
【発明の効果】
【0007】
本発明によれば、搬送用台車にマーカーを付さなくても、搬送用台車の連結箇所を適切に特定することができ、特定した連結箇所に連結部を適切に連結することができる。
【図面の簡単な説明】
【0008】
本実施形態に係る無人搬送車システムの構成図である。
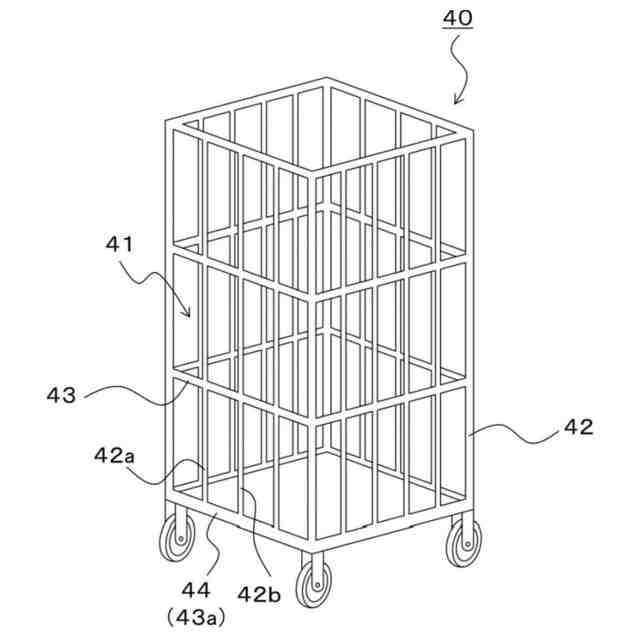
カゴ車の一例を示す斜視図である。
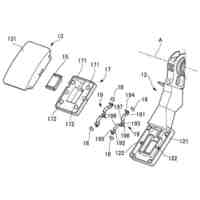
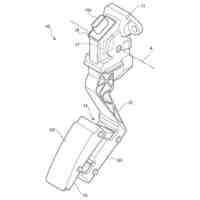
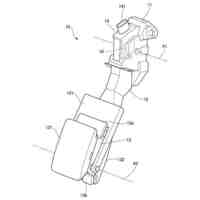
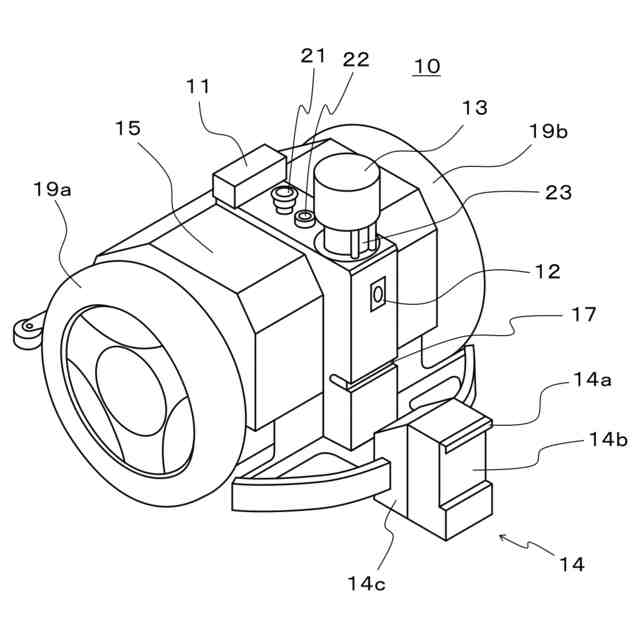
本実施形態に係る無人搬送車の斜視図である。
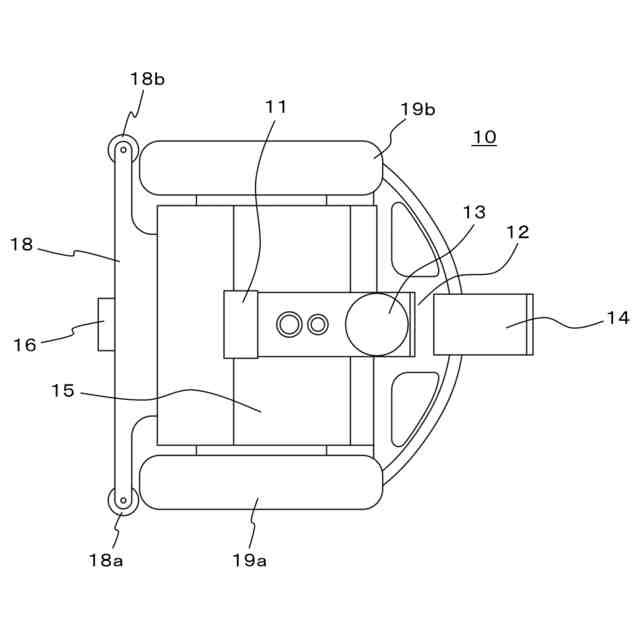
本実施形態に係る無人搬送車の平面図である。
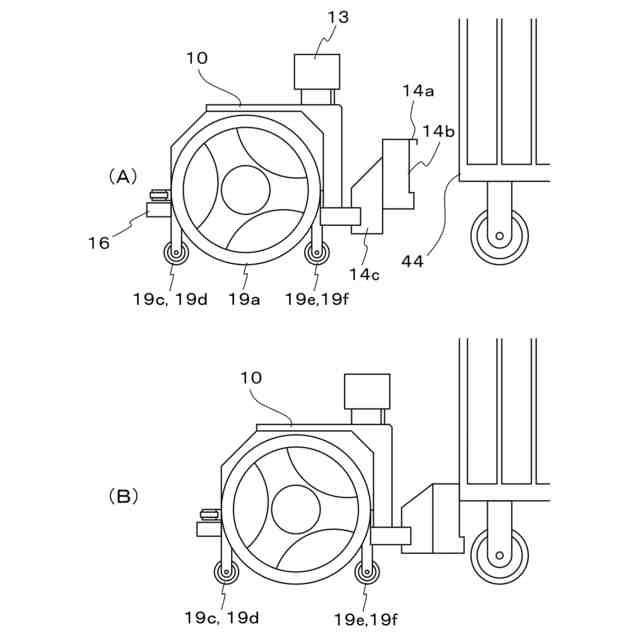
無人搬送車とカゴ車との連結を説明するための図である。
本実施形態に係るロボット制御部の機能を説明するブロック図である。
本実施形態に係る倉庫の平面図である。
フッキングエリアでのカゴ車のフッキング方法を説明するための図である。
リリースエリアでのカゴ車のリリース方法を説明するための図である。
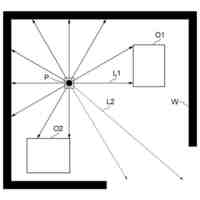
カゴ車に対する無人搬送車の相対位置および相対角度の算出方法を説明するための図である。
無人搬送車をカゴ車に連結する場面における、カゴ車に対する無人搬送車の位置および向きの調整方法を説明するための図である。
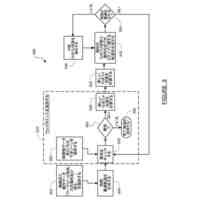
本実施形態に係る無人搬送処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に、図を参照して、本発明に係る無人搬送車システムの実施形態について説明する。本実施形態に係る無人搬送車システム1は、図1に示すように、RMサーバ30と、複数のカゴ車40と、管理端末50と、複数の無人搬送車10とを有する。カゴ車40および無人搬送車10は、倉庫等の屋内施設の作業場所に設置されている。なお、本実施形態では、無人搬送車10が搬送する搬送用台車として、カゴ車40を例示して説明するが、無人搬送車10が搬送する台車は、カゴ車40に限定されず、平台車、カートトラックなどの搬送用台車も使用することができる。
【0010】
RMサーバ30は、無人搬送車10の管理を実現可能とするサーバであり、CPUおよび記憶装置を備えたサーバ装置にRM(Robot Master)ソフトウェアおよびデータベースソフトウェアをインストールして構築されている。このRMソフトウェアは、主要な機能を実現するソフトウェアモジュールとして、搬送車管理部31と、作業調整部32と、作業場所管理部33とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
トヨタ自動車株式会社
ペダル機構
14日前
三栄ハイテックス株式会社
基準電圧回路
今日
株式会社ダイフク
搬送設備
15日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
24日前
トヨタ自動車株式会社
移動体、及び制御方法
22日前
株式会社やまびこ
走行制御装置
1か月前
株式会社タブチ
減圧弁
1か月前
WHILL株式会社
電動モビリティ
23日前
株式会社計数技研
移動体、及びプログラム
15日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
3日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
22日前
日本信号株式会社
自走式装置
29日前
株式会社ダイヘン
移動体、及び誘導線検出装置
7日前
株式会社ダイヘン
移動体、及び誘導線検出装置
7日前
井関農機株式会社
作業車両
1か月前
株式会社デンソー
診断装置
1か月前
株式会社アイシン
自律移動体
29日前
株式会社アイシン
自律移動体
29日前
株式会社アイシン
自律移動体
29日前
株式会社アイシン
自律移動体
29日前
FCLコンポーネント株式会社
電源回路および検出装置
1か月前
株式会社東海理化電機製作所
ペダル装置
10日前
株式会社東海理化電機製作所
ペダル装置
10日前
株式会社ダイヘン
情報処理装置
22日前
株式会社マキタ
作業ロボット
1か月前
株式会社東海理化電機製作所
ペダル装置
10日前
横河電機株式会社
電流出力装置
16日前
ファナック株式会社
機械プログラミング方法
1か月前
オークラ輸送機株式会社
走行車および自律走行方法
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ