TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079445
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192105
出願日
2023-11-10
発明の名称
制御システム、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/633 20240101AFI20250515BHJP(制御;調整)
要約
【課題】環境に応じた停止位置を決定すること。
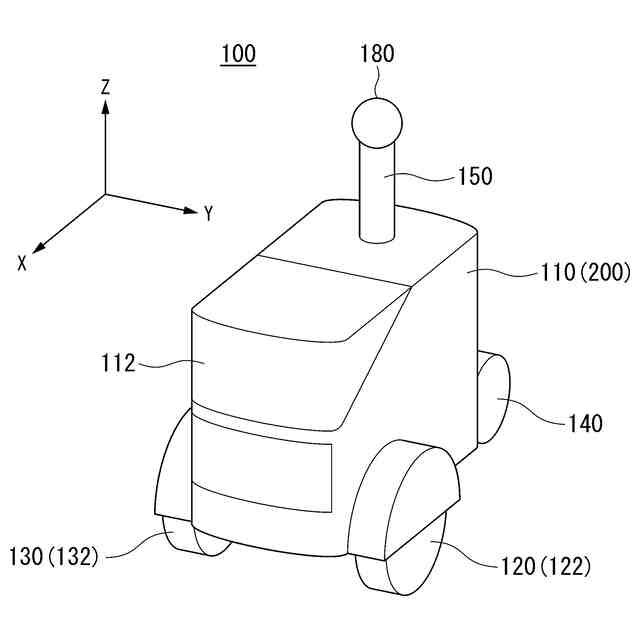
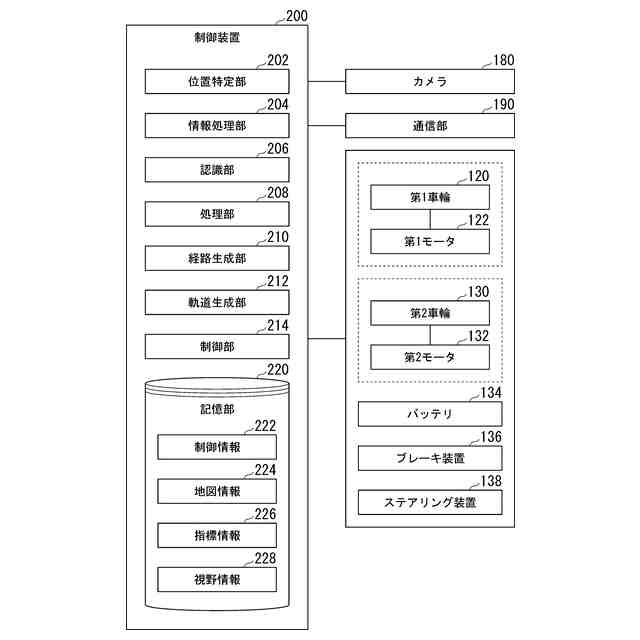
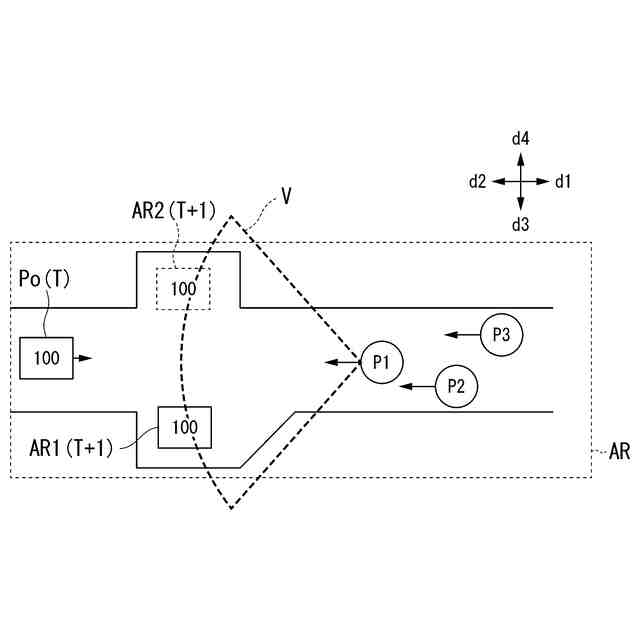
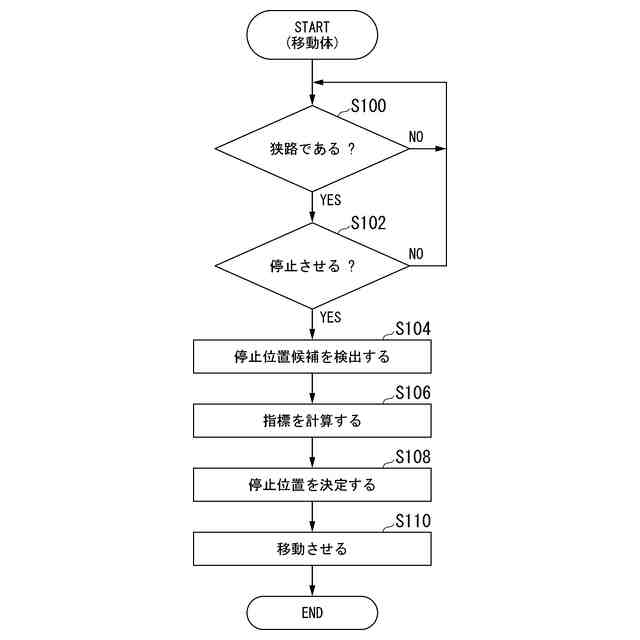
【解決手段】歩行者が移動可能な領域を自律して移動可能である移動体を制御する制御システムであって、前記移動体の周辺の物体を検出する検出部と、前記検出部の検出の結果に基づいて前記物体に含まれる前記移動体とすれ違うと推定される交通参加者および前記移動体が退避可能な停止位置を認識する認識部と、前記交通参加者と前記移動体とがすれ違うと推定される場合に、前記交通参加者の視野範囲に前記移動体が含まれるように停止位置に前記移動体を停止させる制御部と、を備える制御システムである。
【選択図】図5
特許請求の範囲
【請求項1】
歩行者が移動可能な領域を自律して移動可能である移動体を制御する制御システムであって、
前記移動体の周辺の物体を検出する検出部と、
前記検出部の検出の結果に基づいて前記物体に含まれる前記移動体とすれ違うと推定される交通参加者および前記移動体が退避可能な停止位置を認識する認識部と、
前記交通参加者と前記移動体とがすれ違うと推定される場合に、前記交通参加者の視野範囲に前記移動体が含まれるように停止位置に前記移動体を停止させる制御部と、
を備える制御システム。
続きを表示(約 1,600 文字)
【請求項2】
前記制御部は、複数の前記交通参加者が存在し、且つ複数の停止位置候補が存在する場合、前記複数の停止位置候補のうち前記複数の交通参加者のそれぞれの視野範囲に移動体が含まれる停止位置候補を停止位置に決定し、前記停止位置に前記移動体を停止させる、
請求項1に記載の制御システム。
【請求項3】
前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定される場合に、複数の前記停止位置の候補である停止位置候補のそれぞれに前記移動体が停止したと想定し、前記停止位置候補のうち、前記視野範囲の水平方向に関する中心または中心に近い位置に前記移動体が位置する前記停止位置候補を前記停止位置に決定する、
請求項1に記載の制御システム。
【請求項4】
前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定される場合に、複数の停止位置候補のそれぞれに前記移動体が停止したと想定し、前記停止位置候補のうち、前記移動体が前記物体に隠れずに前記移動体のより多くの部分が含まれる前記視野範囲に対応する前記停止位置候補を前記停止位置に決定する、
請求項1に記載の制御システム。
【請求項5】
前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定され、且つ複数の前記交通参加者が存在するとき、複数の停止位置候補のそれぞれに前記移動体が停止したと想定した場合に、前記停止位置候補ごとの前記複数の交通参加者のそれぞれの前記視野範囲において、前記移動体が物体に隠れずに前記移動体が認識可能な領域の大きさに基づく指標を、前記停止位置候補ごとの前記複数の交通参加者のそれぞれについて求め、
更に、前記停止位置候補ごとの前記複数の交通参加者のそれぞれの前記指標を統計処理した処理後の複数の指標のうち、最も大きい指標の停止位置候補を停止位置に決定する、
請求項1に記載の制御システム。
【請求項6】
前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定される場合に、
複数の停止位置候補のそれぞれに前記移動体が停止したと想定し、
前記視野範囲の水平方向の中心に対して水平方向の距離の乖離度合に応じた指標が対応付けられた指標情報と、前記視野範囲における前記停止位置候補のそれぞれに対応する前記物体に隠れていない前記移動体の前記水平方向の位置とに基づいて、前記停止位置を決定する、
請求項1に記載の制御システム。
【請求項7】
前記指標情報は、前記視野範囲の水平方向の中心に対して水平方向の距離が乖離するほど指標が低く設定され、
前記制御部は、複数の交通参加者の視野範囲のそれぞれに対する前記移動体の前記水平方向の位置に応じた前記指標情報の指標の合計を導出し、導出した合計のそれぞれを参照して前記停止位置を決定する、
請求項6に記載の制御システム。
【請求項8】
前記制御部は、前記移動体が前記交通参加者とすれ違う際に前記移動体が前記交通参加者を避けるために前記移動体を幅方向に移動させる必要がある狭路において、前記交通参加者の視野範囲に前記移動体が含まれるように停止位置に前記移動体を停止させる、
請求項1から7のうちいずれか1項に記載の制御システム。
【請求項9】
前記制御部は、前記停止位置または停止位置付近に前記移動体を移動させた後、前記交通参加者が前記移動体に近づくにつれて、前記移動体を幅方向に関して前記交通参加者が存在する方向とは反対の方向に移動させる、
請求項1から7のうちいずれか1項に記載の制御システム。
【請求項10】
前記移動体は、車両が移動できず歩行者が移動可能な領域を自律して移動可能である、
請求項1から7のうちいずれか1項に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム、制御方法、およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
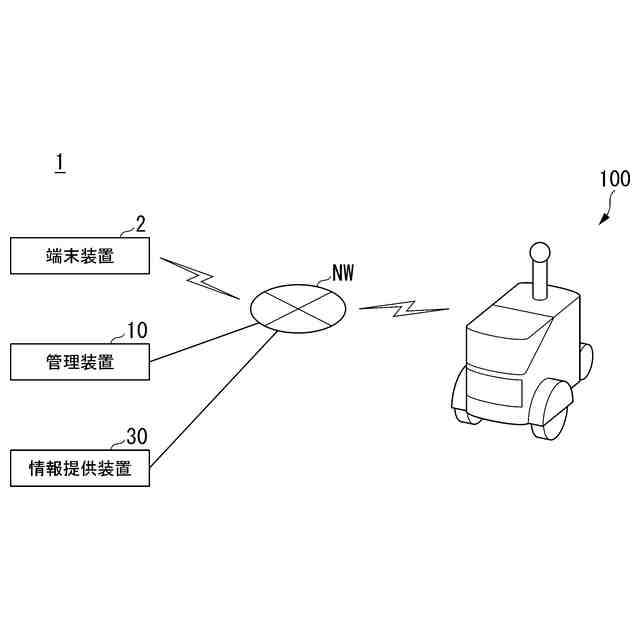
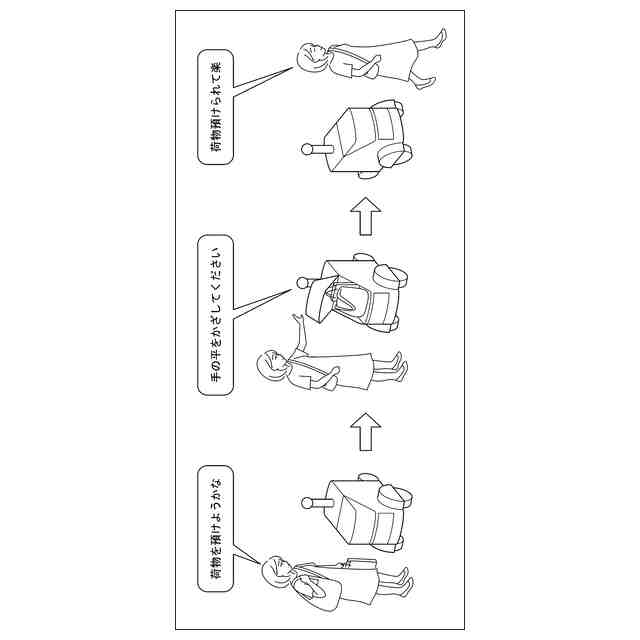
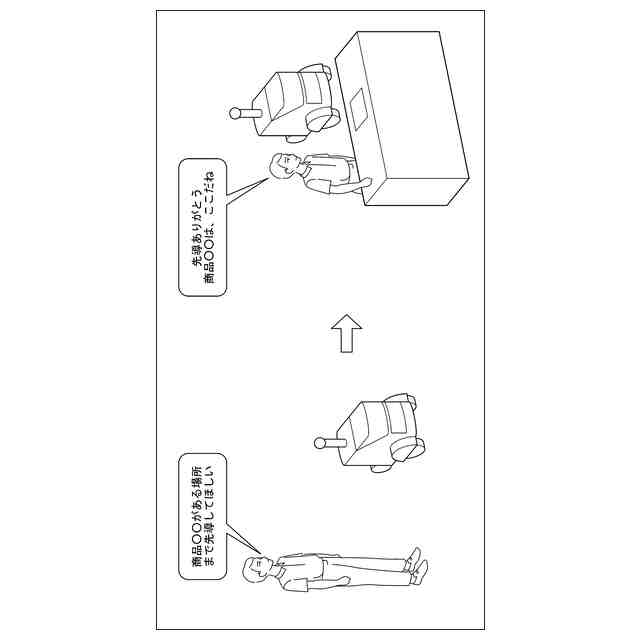
従来、ユーザを所望の場所に案内したり、荷物を搬送したりするロボットが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2012-111011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のシステムでは、移動体の停止位置については十分に検討されていなかった。
【0005】
本発明は、このような事情を考慮してなされたものであり、環境に応じた停止位置を決定することができる制御システム、制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る制御システム、制御方法、およびプログラムは、以下の構成を採用した。
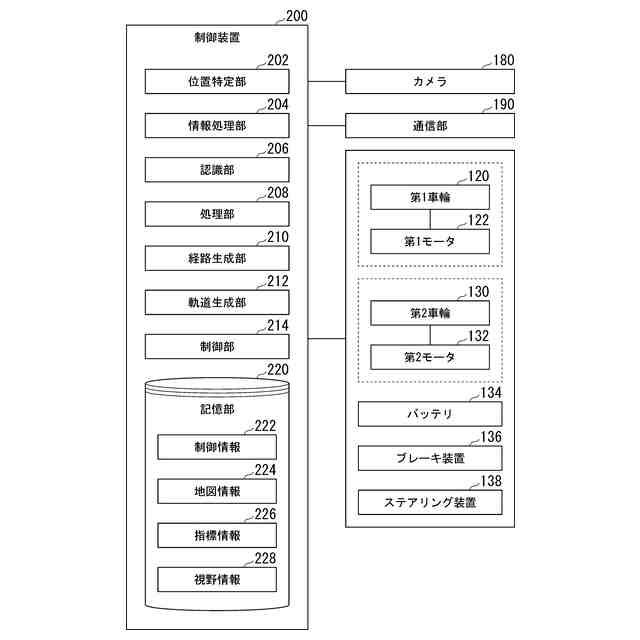
(1):この発明の一態様に係る制御システムは、歩行者が移動可能な領域を自律して移動可能である移動体を制御する制御システムであって、前記移動体の周辺の物体を検出する検出部と、前記検出部の検出の結果に基づいて前記物体に含まれる前記移動体とすれ違うと推定される交通参加者および前記移動体が退避可能な停止位置を認識する認識部と、前記交通参加者と前記移動体とがすれ違うと推定される場合に、前記交通参加者の視野範囲に前記移動体が含まれるように停止位置に前記移動体を停止させる制御部と、を備える。
【0007】
(2):上記(1)の態様において、前記制御部は、複数の前記交通参加者が存在し、且つ複数の停止位置候補が存在する場合、前記複数の停止位置候補のうち前記複数の交通参加者のそれぞれの視野範囲に移動体が含まれる停止位置候補を停止位置に決定し、前記停止位置に前記移動体を停止させる。
【0008】
(3):上記(1)の態様において、前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定される場合に、複数の前記停止位置の候補である停止位置候補のそれぞれに前記移動体が停止したと想定し、前記停止位置候補のうち、前記視野範囲の水平方向に関する中心または中心に近い位置に前記移動体が位置する前記停止位置候補を前記停止位置に決定する。
【0009】
(4):上記(1)の態様において、前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定される場合に、複数の停止位置候補のそれぞれに前記移動体が停止したと想定し、前記停止位置候補のうち、前記移動体が前記物体に隠れずに前記移動体のより多くの部分が含まれる前記視野範囲に対応する前記停止位置候補を前記停止位置に決定する。
【0010】
(5):上記(1)の態様において、前記制御部は、前記交通参加者と前記移動体とがすれ違うと推定され、且つ複数の前記交通参加者が存在するとき、複数の停止位置候補のそれぞれに前記移動体が停止したと想定した場合に、前記停止位置候補ごとの前記複数の交通参加者のそれぞれの前記視野範囲において、前記移動体が物体に隠れずに前記移動体が認識可能な領域の大きさに基づく指標を、前記停止位置候補ごとの前記複数の交通参加者のそれぞれについて求め、更に、前記停止位置候補ごとの前記複数の交通参加者のそれぞれの前記指標を統計処理した処理後の複数の指標のうち、最も大きい指標の停止位置候補を停止位置に決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
トヨタ自動車株式会社
ペダル機構
今日
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社ダイフク
搬送設備
1日前
三菱電機株式会社
自己位置推定装置
10日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
8日前
株式会社タブチ
減圧弁
25日前
株式会社計数技研
移動体、及びプログラム
1日前
WHILL株式会社
電動モビリティ
9日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
15日前
株式会社ダイヘン
搬送車
8日前
株式会社デンソー
診断装置
29日前
井関農機株式会社
作業車両
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
25日前
株式会社アイシン
自律移動体
15日前
株式会社アイシン
自律移動体
15日前
株式会社アイシン
自律移動体
15日前
株式会社アイシン
自律移動体
15日前
ファナック株式会社
機械プログラミング方法
21日前
横河電機株式会社
電流出力装置
2日前
株式会社マキタ
作業ロボット
1か月前
三菱電機株式会社
状態推定装置及び移動体制御装置
11日前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
株式会社ダイヘン
情報処理装置
8日前
個人
自動搬送車
9日前
ファナック株式会社
工作機械の迅速な移動計画
21日前
ローム株式会社
電源起動監視回路
1か月前
株式会社マキタ
自律移動システム
1か月前
ACTN株式会社
接点監視ユニット及び遠隔接点監視システム
9日前
三菱電機株式会社
飛行体制御装置および飛行体制御方法
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ