TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075985
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023187548
出願日
2023-11-01
発明の名称
飛行体制御装置および飛行体制御方法
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G05D
1/46 20240101AFI20250508BHJP(制御;調整)
要約
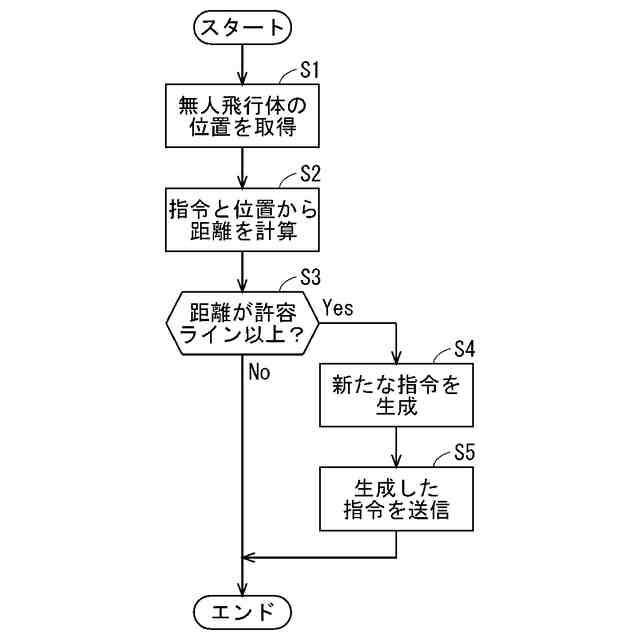
【課題】人飛行体が飛行経路から逸脱した場合でも、効率のよい飛行を実現できる飛行体制御装置を提供する。
【解決手段】本開示に係る飛行体制御装置は、無人飛行体の作業実施範囲を含む飛行経路を指令として生成する指令生成部と、指令を記憶する記憶部と、記憶部に記憶されている指令を無人飛行体に送信する送信部と、無人飛行体の指令からの逸脱を判定する判定部と、を有し、判定部は、無人飛行体が前記飛行経路から許容距離離れた場合に逸脱したと判定し、許容距離に達した地点を逸脱地点とし、指令生成部は、無人飛行体が指令から逸脱した場合、無人飛行体の作業実施範囲のうちの未実施の作業範囲に戻るための復帰点が、逸脱地点からの移動距離が最短距離となるように新たな指令を生成する。
【選択図】図1
特許請求の範囲
【請求項1】
作業に使用される無人飛行体を制御する飛行体制御装置であって、
前記無人飛行体の作業実施範囲を含む飛行経路を指令として生成する指令生成部と、
前記指令を記憶する記憶部と、
前記記憶部に記憶されている前記指令を前記無人飛行体に送信する送信部と、
前記無人飛行体の前記指令からの逸脱を判定する判定部と、を有し、
前記判定部は、
前記無人飛行体が前記飛行経路から許容距離離れた場合に逸脱したと判定し、前記許容距離に達した地点を逸脱地点とし、
前記指令生成部は、
前記無人飛行体が前記指令から逸脱した場合、前記無人飛行体の前記作業実施範囲のうちの未実施の作業範囲に戻るための復帰点が、前記逸脱地点からの移動距離が最短距離となるように新たな指令を生成する、飛行体制御装置。
続きを表示(約 1,300 文字)
【請求項2】
作業に使用される無人飛行体を制御する飛行体制御装置であって、
前記無人飛行体の作業実施範囲を含む飛行経路を指令として生成する指令生成部と、
前記指令を記憶する記憶部と、
前記記憶部に記憶されている前記指令を前記無人飛行体に送信する送信部と、
前記無人飛行体の前記指令からの逸脱を判定する判定部と、を有し、
前記判定部は、
前記無人飛行体が前記飛行経路から許容距離離れた場合に逸脱したと判定し、
前記指令生成部は、
前記無人飛行体が外乱により前記指令から逸脱した場合、前記外乱の方向に基づく方向に移動するように新たな指令を生成する、飛行体制御装置。
【請求項3】
前記指令生成部は、
前記無人飛行体の前記指令からの逸脱後の前記新たな指令を、前記指令の一部または全体を変更して生成する、請求項1または請求項2記載の飛行体制御装置。
【請求項4】
前記無人飛行体の位置、速度および加速度の情報を用いて前記無人飛行体が前記指令から逸脱しないかを予測する逸脱予測部を有する、請求項1または請求項2記載の飛行体制御装置。
【請求項5】
前記無人飛行体の飛行情報を記憶する記憶部と、
前記許容距離の尤度を、前記記憶部に記憶された前記無人飛行体の前記飛行情報に含まれる前記指令からの逸脱の傾向に基づいて変更する尤度調整部と、を有する、請求項1または請求項2記載の飛行体制御装置。
【請求項6】
前記無人飛行体は、
前記作業に使用されるセンサを有し、
前記許容距離は、
前記センサのセンシング方向に応じて変更する、請求項1または請求項2記載の飛行体制御装置。
【請求項7】
前記飛行経路からの距離が前記許容距離よりも遠く、前記無人飛行体が絶対に越えてはならない絶対距離が設定される、請求項1または請求項2記載の飛行体制御装置。
【請求項8】
前記飛行体制御装置は、
前記無人飛行体の外部に設けられる、請求項1または請求項2記載の飛行体制御装置。
【請求項9】
前記飛行体制御装置は、
前記無人飛行体に搭載される、請求項1または請求項2記載の飛行体制御装置。
【請求項10】
作業に使用される無人飛行体を制御する飛行体制御方法であって、
前記無人飛行体の作業実施範囲を含む飛行経路を指令として生成し、
前記指令を記憶し、
前記指令を前記無人飛行体に送信し、
前記無人飛行体の前記指令からの逸脱を判定し、
前記判定においては、
前記無人飛行体が前記飛行経路から許容距離離れた場合に逸脱したと判定し、前記許容距離に達した地点を逸脱地点とし、
前記指令の生成においては、
前記無人飛行体が前記指令から逸脱した場合、前記無人飛行体の前記作業実施範囲のうちの未実施の作業範囲に戻るための復帰点が、前記逸脱地点からの移動距離が最短距離となるように新たな指令を生成する、飛行体制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は飛行体制御装置に関し、特に、無人飛行体が飛行経路から逸脱した場合でも飛行経路に復帰させることができる飛行体制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、無人航空機(unmanned aerial vehicle:UAV)を識別する1つ以上のUAV識別子およびユーザーを識別する1つ以上のユーザー識別子を記憶する識別登録データベースと、無人航空機の識別情報およびユーザーの識別情報を認証する認証センターと、UAV識別子およびユーザー識別子の少なくとも1つに基づいて、飛行規制のセットを提供する航空制御システムと、を備える、無人航空機を操作するシステムが開示されている。
【0003】
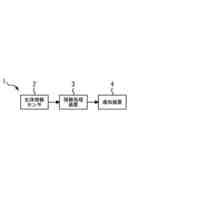
測量、測位および各種の点検で使われる無人飛行体は、GPS(Global Positioning System)センサなどの測位センサを用いて自機の位置を特定し、飛行経路の情報と照らし合わせることで飛行経路に沿った飛行を行いながらデータの取得を行う。しかし、風などの外乱および誤差などで飛行経路から逸脱してしまうことがあり、その場合は、本来取得すべきエリアのデータが取得できないこととなる。
【0004】
特許文献1では無人航空機の飛行経路からの逸脱を判定し、地図上にバーチャルなフェンスを設置するジオフェンスまたは飛行規制によって飛行経路を調整することができる。しかし、飛行経路をどのように調整するかについて具体的に記載されておらず、効率のよい飛行を実現することについて改善の余地がある。
【先行技術文献】
【特許文献】
【0005】
特開2019-055774号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示は上記のような問題を解決するためになされたものであり、無人飛行体が飛行経路から逸脱した場合でも、効率のよい飛行を実現できる飛行体制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る飛行体制御装置は、作業に使用される無人飛行体を制御する飛行体制御装置であって、前記無人飛行体の作業実施範囲を含む飛行経路を指令として生成する指令生成部と、前記指令を記憶する記憶部と、前記記憶部に記憶されている前記指令を前記無人飛行体に送信する送信部と、前記無人飛行体の前記指令からの逸脱を判定する判定部と、を有し、前記判定部は、前記無人飛行体が前記飛行経路から許容距離離れた場合に逸脱したと判定し、前記許容距離に達した地点を逸脱地点とし、前記指令生成部は、前記無人飛行体が前記指令から逸脱した場合、前記無人飛行体の前記作業実施範囲のうちの未実施の作業範囲に戻るための復帰点が、前記逸脱地点からの移動距離が最短距離となるように新たな指令を生成する。
【発明の効果】
【0008】
本開示に係る飛行体制御装置によれば、無人飛行体が前記指令から逸脱した場合、無人飛行体の作業実施範囲のうちの未実施の作業範囲に戻るための復帰点が、逸脱地点からの移動距離が最短距離となるので、無人飛行体の飛行時間の増加を抑制して効率のよい飛行を実現でき、また、未実施の作業範囲に戻ることで、データの取り直しを抑制できる。
【図面の簡単な説明】
【0009】
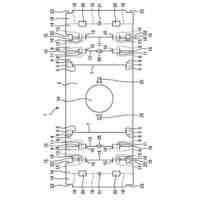
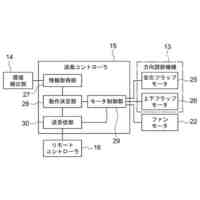
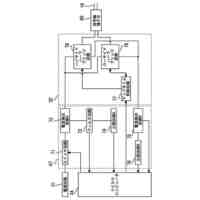
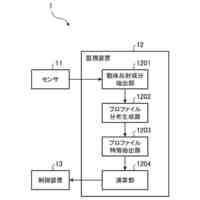
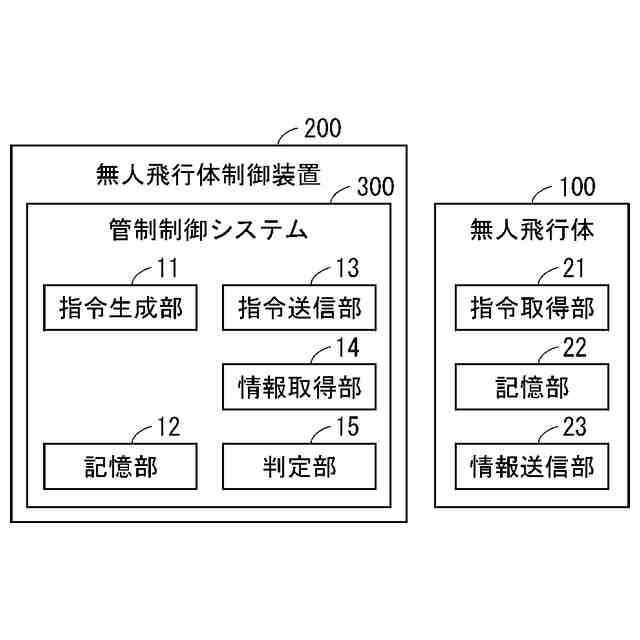
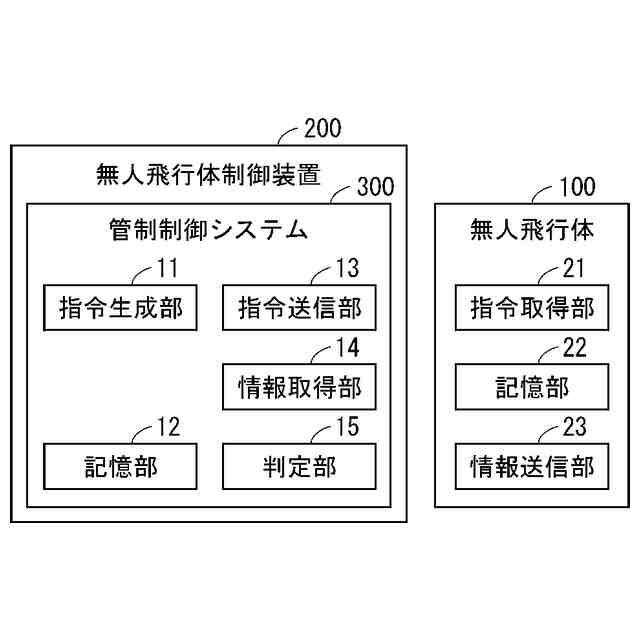
本開示に係る実施の形態1の無人飛行体制御装置の構成および無人飛行体の構成を示す機能ブロック図である。
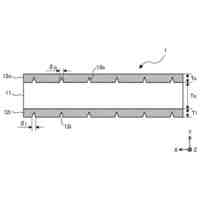
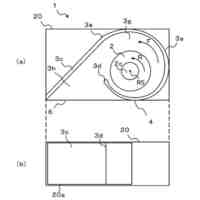
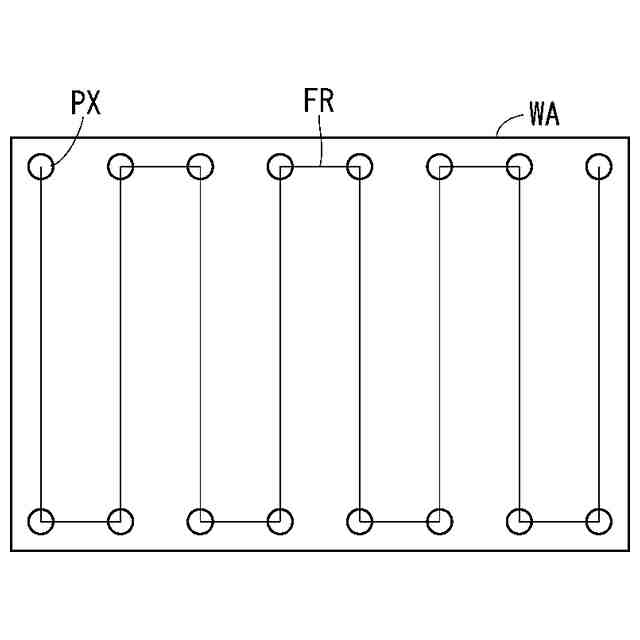
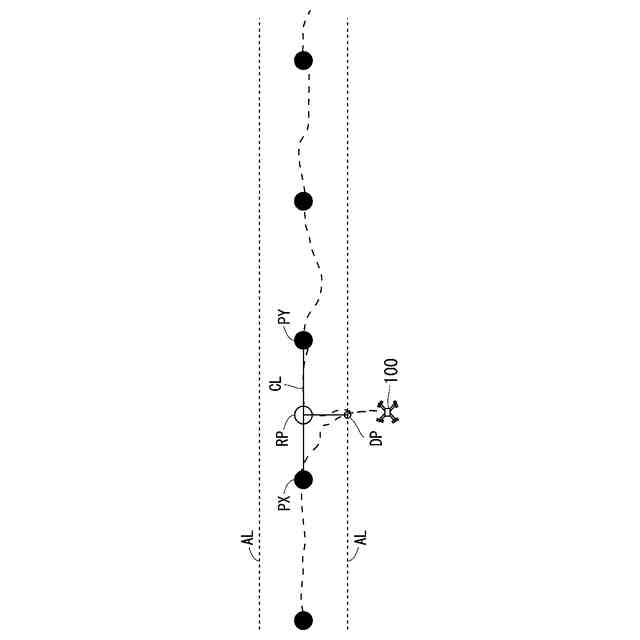
作業実施範囲に対して設定された無人飛行体の飛行経路を示す図である。
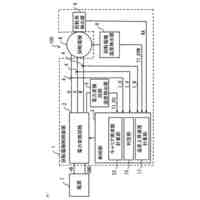
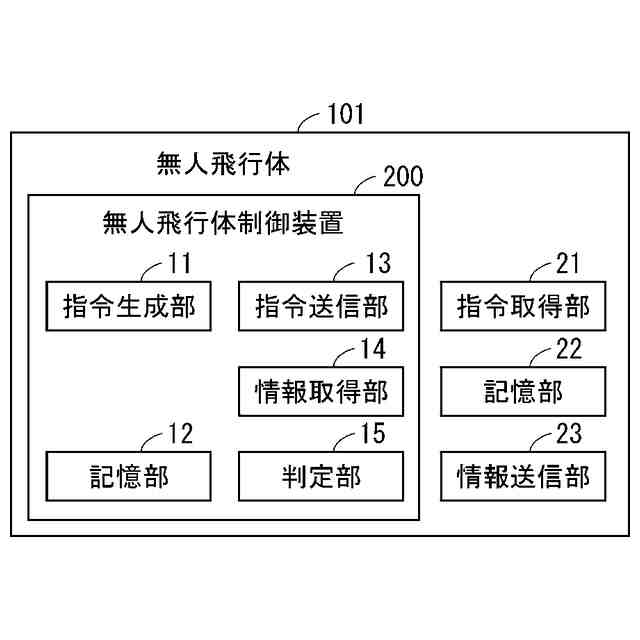
本開示に係る実施の形態1の無人飛行体制御装置を無人飛行体に搭載した構成を示す機能ブロック図である。
本開示に係る実施の形態1の無人飛行体制御装置における逸脱判定および新たな指令の生成を説明するフローチャートである。
無人飛行体が飛行経路から逸脱した場合の復帰点を説明する図である。
作業実施範囲から無人飛行体が逸脱した一例を示す図である。
作業実施範囲から無人飛行体が逸脱した一例を示す図である。
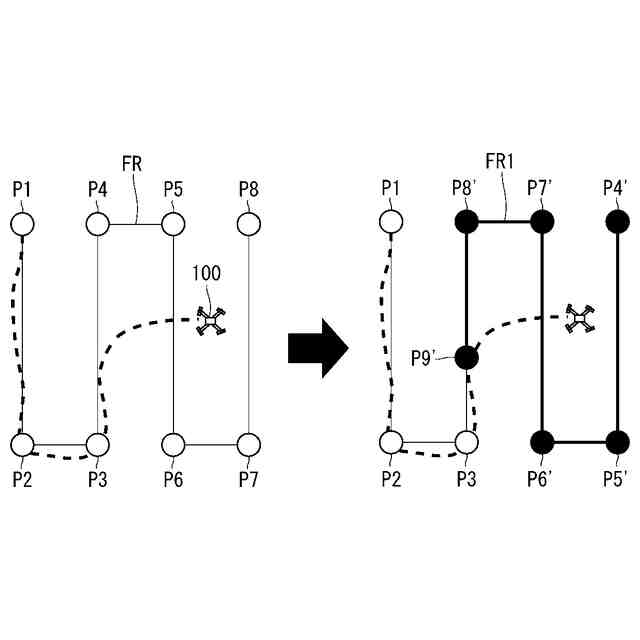
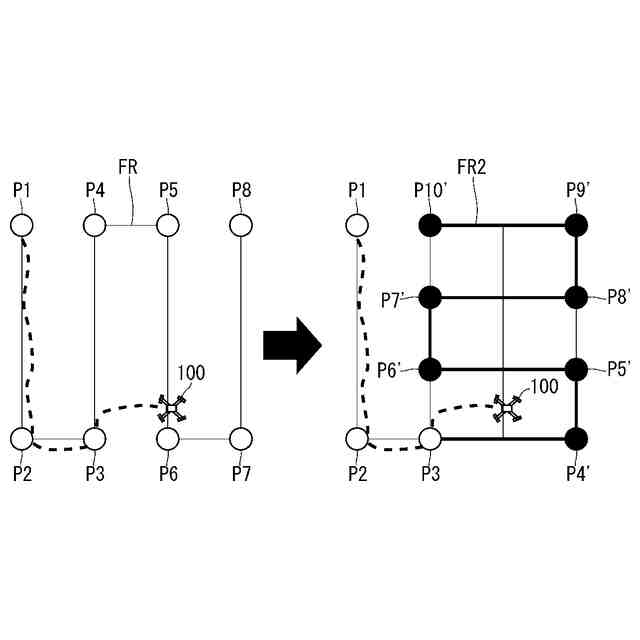
飛行経路の変更を模式的に説明する図である。
飛行経路の変更を模式的に説明する図である。
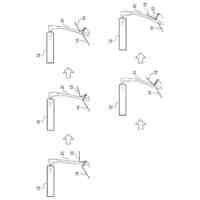
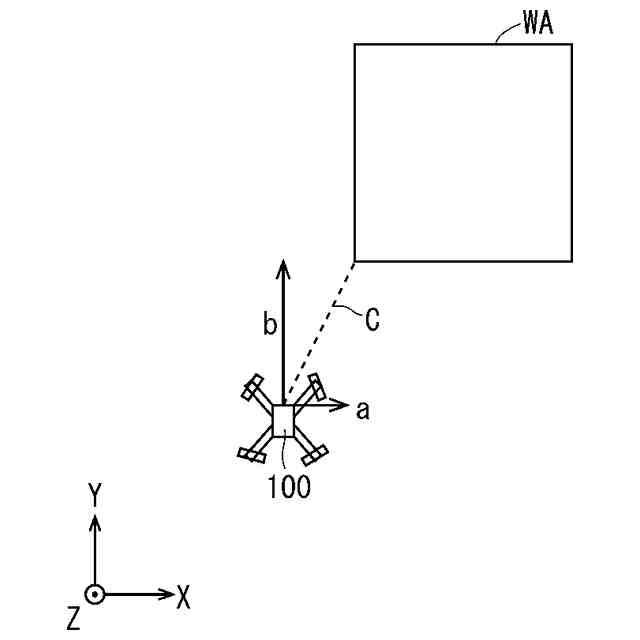
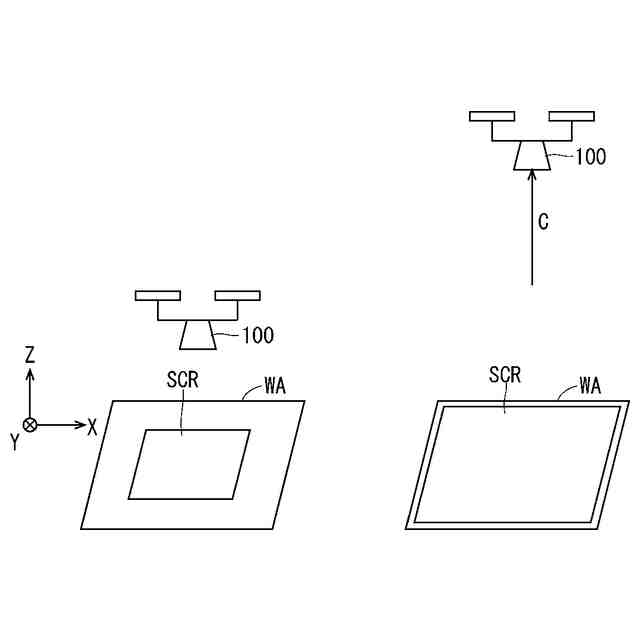
無人飛行体によるセンシングを説明する図である。
センサの取り付け角度による許容ラインを示す図である。
センサの取り付け角度による許容ラインを示す図である。
本開示に係る実施の形態1の変形例の無人飛行体制御装置の構成を示す機能ブロック図である。
逸脱予測部の機能を説明する模式図である。
許容尤度調整部の機能を説明する模式図である。
【発明を実施するための形態】
【0010】
<実施の形態1>
<装置構成>
図1は、本開示に係る実施の形態1の無人飛行体制御装置200および無人飛行体制御装置200によって制御される無人飛行体100の構成を示す機能ブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
22日前
三菱電機株式会社
吸音体
18日前
三菱電機株式会社
冷蔵庫
4日前
三菱電機株式会社
梱包装置
1日前
三菱電機株式会社
電子機器
5日前
三菱電機株式会社
照明装置
5日前
三菱電機株式会社
照明装置
9日前
三菱電機株式会社
送風装置
16日前
三菱電機株式会社
飛しょう体
18日前
三菱電機株式会社
半導体装置
8日前
三菱電機株式会社
遠心送風機
18日前
三菱電機株式会社
半導体装置
19日前
三菱電機株式会社
加熱調理器
19日前
三菱電機株式会社
電気掃除機
19日前
三菱電機株式会社
半導体装置
24日前
三菱電機株式会社
制御システム
4日前
三菱電機株式会社
電力変換装置
2日前
三菱電機株式会社
電力変換装置
12日前
三菱電機株式会社
給湯システム
2日前
三菱電機株式会社
照明システム
24日前
三菱電機株式会社
照明システム
9日前
三菱電機株式会社
貯湯式給湯機
8日前
三菱電機株式会社
電力変換装置
8日前
三菱電機株式会社
非可逆回路素子
19日前
三菱電機株式会社
誘導加熱調理器
18日前
三菱電機株式会社
見守りシステム
25日前
三菱電機株式会社
電磁ピンセット
4日前
三菱電機株式会社
回転電機制御装置
11日前
三菱電機株式会社
半導体素子駆動装置
17日前
三菱電機株式会社
監視装置および監視方法
15日前
三菱電機株式会社
掃除機および掃除システム
12日前
三菱電機株式会社
通風装置および換気システム
4日前
三菱電機株式会社
検出システムおよび検出方法
5日前
三菱電機株式会社
半導体装置及びその製造方法
4日前
三菱電機株式会社
設備プレート及び照明システム
10日前
三菱電機株式会社
緩衝材、梱包装置および防音構造
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ