TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076916
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188878
出願日
2023-11-02
発明の名称
電動アシスト車両
出願人
ヤマハ発動機株式会社
代理人
弁理士法人はるか国際特許事務所
主分類
B62M
6/45 20100101AFI20250509BHJP(鉄道以外の路面車両)
要約
【課題】ディファレンシャルギアを用いずに車両の旋回性能を向上させる。
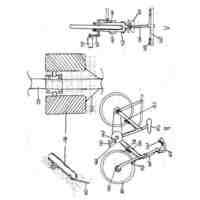
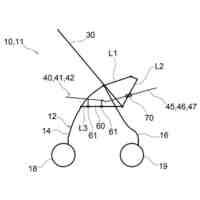
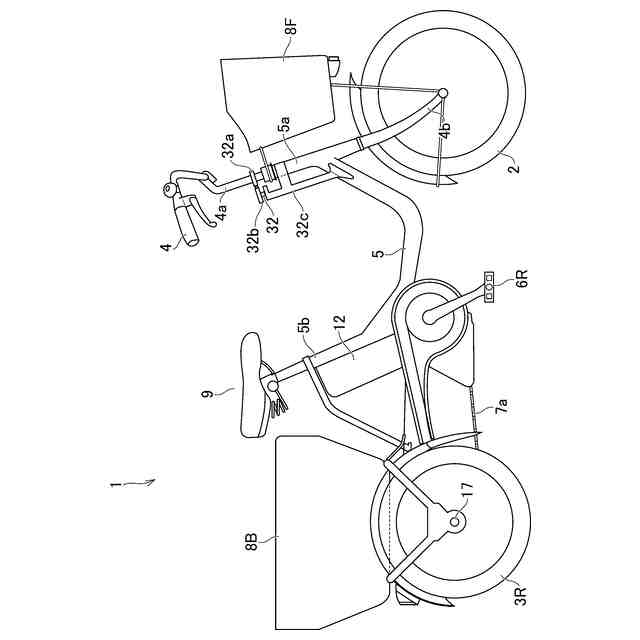
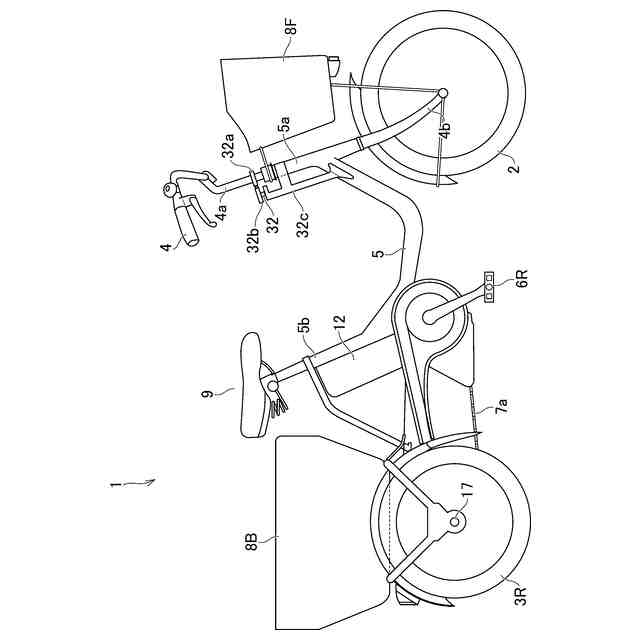
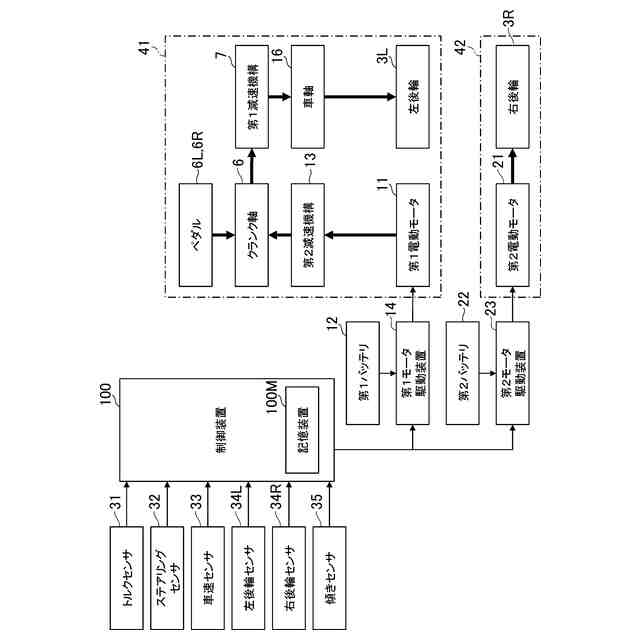
【解決手段】電動アシスト車両(1)は、第1後輪のためのトルクを出力する第1電動モータ(11)と、第2後輪のためのトルクを出力する第2電動モータ(21)と、車両の旋回を表す車両旋回値を検知するための検知部(ステアリングセンサ(32)又は傾きセンサ(35))と、ペダル(6L,6R)に作用する踏力に基づいて算出される基準アシストトルクと、車両旋回値に応じた補正量とに基づいて、第1電動モータ(11)の目標トルクと第2電動モータ(21)の目標トルクとを算出する制御装置とを有している。
【選択図】図1
特許請求の範囲
【請求項1】
前輪と、
前記前輪を操舵するためのステアリングハンドルと、
右後輪と左後輪のうちの一方である伝達される第1後輪と、
前記右後輪と前記左後輪のうちの他方である第2後輪と、
ペダルが取り付けられるクランク軸と、
前記クランク軸のトルクを、前記第1後輪と前記第2後輪の少なくとも一方に伝達するためのトルク伝達経路と、
前記第1後輪のためのトルクを出力する第1電動モータと、
前記第2後輪のためのトルクを出力する第2電動モータと、
車両の旋回を表す車両旋回値を検知するための検知部と、
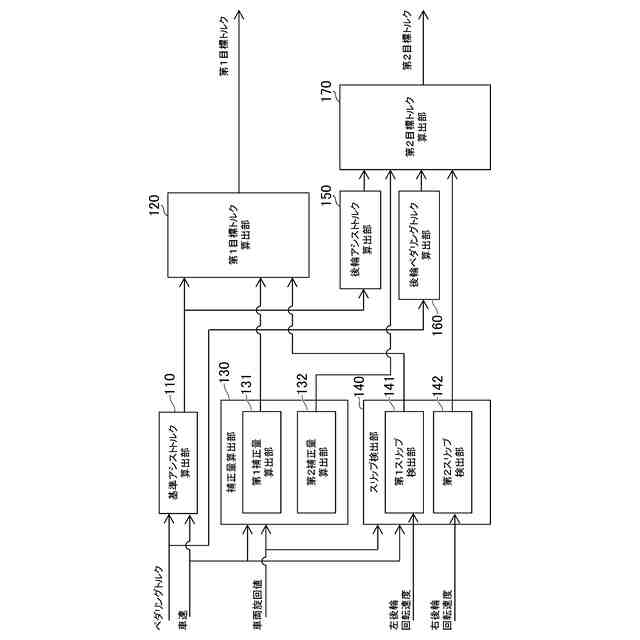
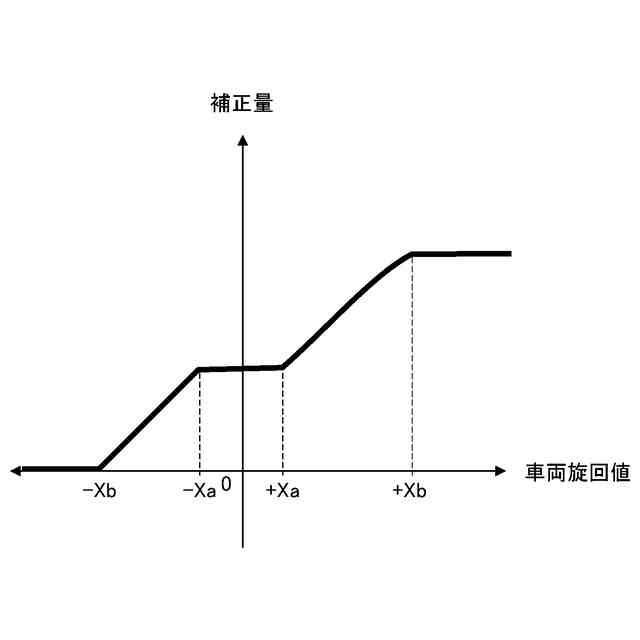
前記ペダルに作用する踏力に基づいて算出される基準アシストトルクと、前記車両旋回値に応じた補正量とに基づいて、前記第1電動モータの目標トルクと前記第2電動モータの目標トルクとを算出する制御装置と
を有している電動アシスト車両。
続きを表示(約 1,000 文字)
【請求項2】
前記第1後輪が内輪となり、且つ前記第2後輪が外輪となる旋回において、前記制御装置は前記第1後輪の目標トルクが低減するように、前記車両旋回値に応じた補正量を算出し、
前記第1後輪が外輪となり、且つ前記第2後輪が内輪となる旋回において、前記制御装置は前記第2後輪の目標トルクが低減するように、前記車両旋回値に応じた補正量を算出する
請求項1に記載される電動アシスト車両。
【請求項3】
前記第1後輪が内輪となり、且つ前記第2後輪が外輪となる旋回において、前記制御装置は前記第2後輪の目標トルクが増大するように、前記車両旋回値に応じた補正量を算出し、
前記第1後輪が外輪となり、且つ前記第2後輪が内輪となる旋回において、前記制御装置は前記第1後輪の目標トルクが増大するように、前記車両旋回値に応じた補正量を算出する
請求項1又は2に記載される電動アシスト車両。
【請求項4】
減速機構を含み、前記クランク軸のトルクと前記第1電動モータのトルクとを前記減速機構を経由して前記第1後輪に伝達するトルク伝達経路を有し、
前記第2電動モータのトルクは前記減速機構を経由することなく前記第2後輪に伝達される
請求項1に記載される電動アシスト車両。
【請求項5】
前記制御装置は、前記基準アシストトルクと、前記車両旋回値に応じた前記補正量と、前記減速機構の減速比とに基づいて前記第2電動モータの目標トルクを算出する
請求項4に記載される電動アシスト車両。
【請求項6】
前記第2電動モータから前記第2後輪に伝達されるトルクは、前記第1電動モータから前記第1後輪に伝達されるトルクよりも大きい
請求項4に記載される電動アシスト車両。
【請求項7】
前記制御装置は、前記クランク軸のトルクに基づいて前記第2電動モータの目標トルクを算出する
請求項4に記載される電動アシスト車両。
【請求項8】
前記車両旋回値は車両のロール角である
請求項1に記載される電動アシスト車両。
【請求項9】
前記車両旋回値はステアリング軸の回転角である
請求項1に記載される電動アシスト車両。
【請求項10】
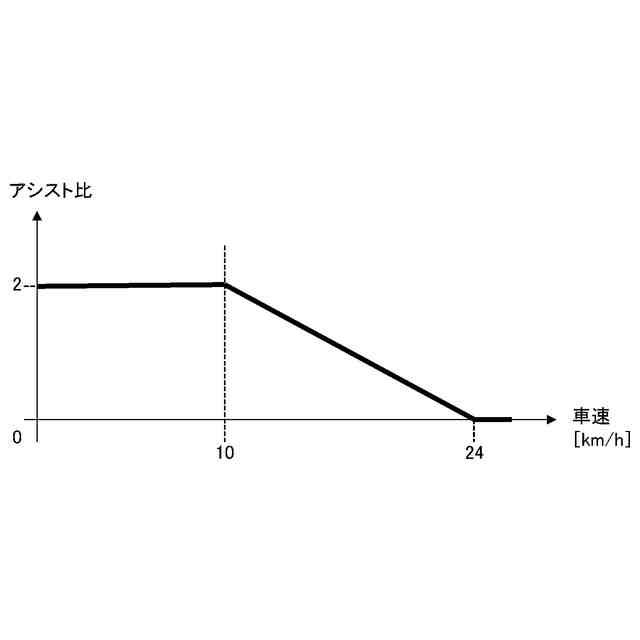
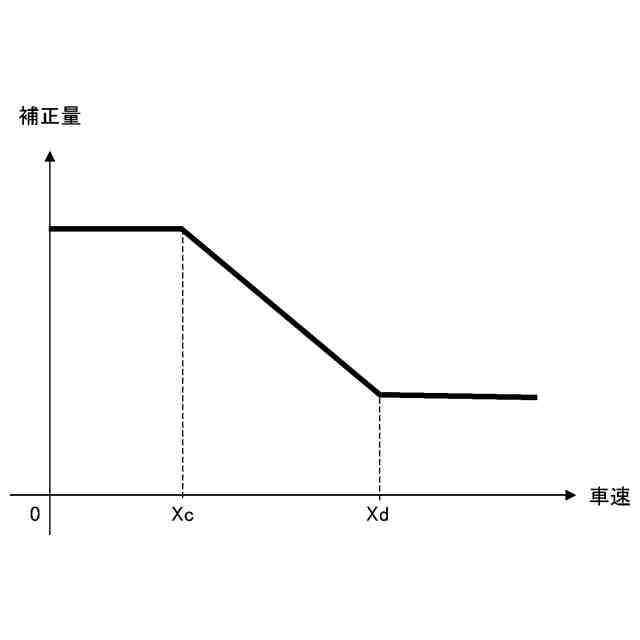
前記制御装置は、前記基準アシストトルクを、前記車両旋回値と車速とに基づいて補正する
請求項1に記載される電動アシスト車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は電動アシスト車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
下記特許文献1には、3輪の電動アシスト車両が開示されている。この車両では、左右の後輪のそれぞれに電動モータが配置されている。左右の後輪の間には、ディフェレンシャル機構が配置され、クランク軸のトルクはチェーンとディファレンシャル機構とを介して左右の後輪に伝えられる。
【先行技術文献】
【特許文献】
【0003】
特開2011-235679号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
左右の後輪に伝達されるトルクが常に同じであると、スムーズな旋回が得られにくい。特許文献1で開示される電動アシスト車両は、ディファレンシャル機構を有しているため構造が複雑であり、コストの観点では好ましくなかった。
【課題を解決するための手段】
【0005】
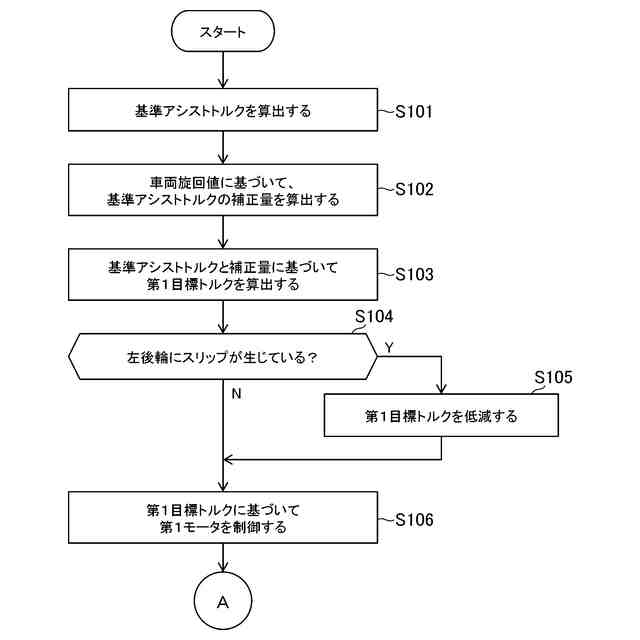
(1)本開示で提案する電動アシスト車両は、前輪と、前記前輪を操舵するためのステアリングハンドルと、右後輪と左後輪のうちの一方である伝達される第1後輪と、前記右後輪と前記左後輪のうちの他方である第2後輪と、ペダルが取り付けられるクランク軸と、前記クランク軸のトルクを、前記第1後輪と前記第2後輪の少なくとも一方に伝達するためのトルク伝達経路と、前記第1後輪のためのトルクを出力する第1電動モータと、前記第2後輪のためのトルクを出力する第2電動モータと、車両の旋回を表す車両旋回値を検知するための検知部と、前記ペダルに作用する踏力に基づいて算出される基準アシストトルクと、前記車両旋回値に応じた補正量とに基づいて、前記第1電動モータの目標トルクと前記第2電動モータの目標トルクとを算出する制御装置と、を有してよい。これによれば、ディファレンシャル機構を利用することなく、車両の旋回性能を向上できる。
【0006】
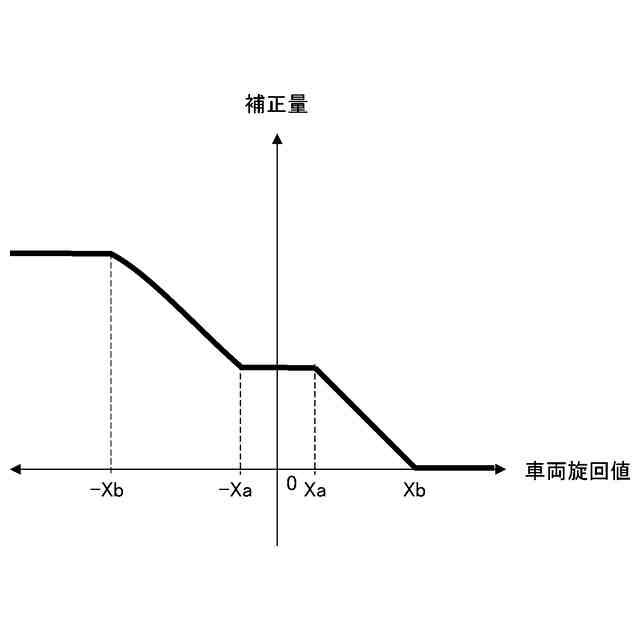
(2)前記(1)の電動アシスト車両において、前記第1後輪が内輪となり、且つ前記第2後輪が外輪となる旋回において、前記制御装置は、前記第1後輪の目標トルクが低減するように、前記車両旋回値に応じた補正量を算出してよい。前記第1後輪が外輪となり、且つ前記第2後輪が内輪となる旋回において、前記制御装置は、前記第2後輪の目標トルクが低減するように、前記車両旋回値に応じた補正量を算出してよい。
【0007】
(3)前記(1)又は(2)の電動アシスト車両において、前記第1後輪が内輪となり、且つ前記第2後輪が外輪となる旋回において、前記制御装置は、前記第2後輪の目標トルクが増大するように、前記車両旋回値に応じた補正量を算出してよい。前記第1後輪が外輪となり、且つ前記第2後輪が内輪となる旋回において、前記制御装置は、前記第1後輪の目標トルクが増大するように、前記車両旋回値に応じた補正量を算出してよい。
【0008】
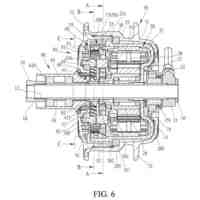
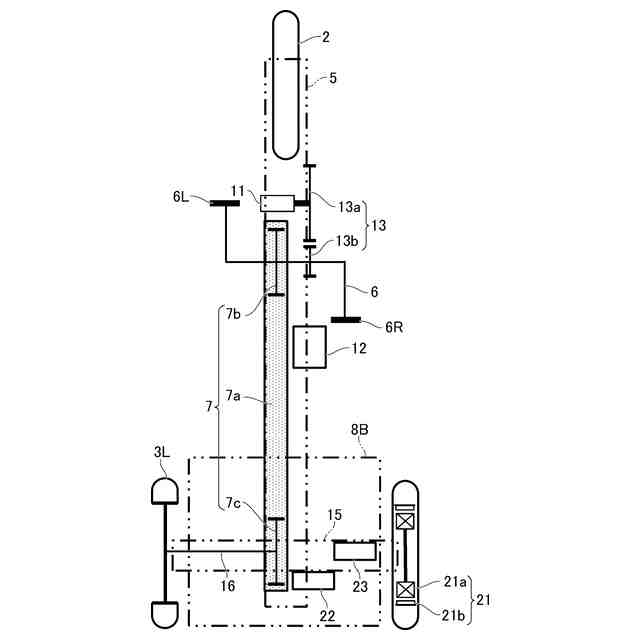
(4)前記(1)乃至(3)のうちのいずれかの電動アシスト車両は、減速機構を含み、前記クランク軸のトルクと前記第1電動モータのトルクとを前記減速機構を経由して前記第1後輪に伝達するトルク伝達経路を有してよい。前記第2電動モータのトルクは、前記減速機構を経由することなく前記第2後輪に伝達されてよい。
【0009】
(5)前記(4)の電動アシスト車両において、前記制御装置は、前記基準アシストトルクと、前記車両旋回値に応じた前記補正量と、前記減速機構の減速比とに基づいて前記第2電動モータの目標トルクを算出してよい。
【0010】
(6)前記(4)又は(5)の電動アシスト車両において、前記第2電動モータから前記第2後輪に伝達されるトルクは、前記第1電動モータから前記第1後輪に伝達されるトルクよりも大きくてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
乗り物
1か月前
個人
発音装置
3か月前
個人
電動モビリティ
3か月前
個人
折り畳み自転車
6か月前
個人
自転車用傘捕捉具
7か月前
個人
自転車用荷台
10か月前
個人
自由方向乗車自転車
3か月前
個人
体重掛けリフト台車
7か月前
個人
アタッチメント
7か月前
個人
キャンピングトライク
4か月前
個人
自転車用荷物台
7か月前
個人
ステアリングの操向部材
10か月前
個人
ステアリングの操向部材
5か月前
株式会社CPM
駐輪機
8か月前
個人
フロントフットブレーキ。
4日前
株式会社豊田自動織機
産業車両
17日前
三甲株式会社
台車
9か月前
株式会社三五
リアサブフレーム
6か月前
三甲株式会社
台車
9か月前
個人
ホイールハブ駆動構造
14日前
ヤマハ発動機株式会社
車両
8か月前
ダイハツ工業株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
8か月前
学校法人千葉工業大学
車両
6か月前
ヤマハ発動機株式会社
車両
8か月前
学校法人千葉工業大学
車両
6か月前
豊田合成株式会社
操舵装置
8か月前
学校法人千葉工業大学
車両
6か月前
株式会社カインズ
台車
6か月前
トヨタ自動車株式会社
パネル
17日前
コンビ株式会社
乳母車
2か月前
株式会社クボタ
作業車
11か月前
株式会社クボタ
作業車
11か月前
株式会社GEAR
電動カート
24日前
株式会社クボタ
作業車
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ