TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069673
公報種別
公開特許公報(A)
公開日
2025-05-01
出願番号
2023179541
出願日
2023-10-18
発明の名称
光軸調整システム、光軸調整方法、及び光軸調整プログラム
出願人
シャープ株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
7/497 20060101AFI20250423BHJP(測定;試験)
要約
【課題】所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を容易かつ精度よく調整することが可能な光軸調整システム、光軸調整方法、及び光軸調整プログラムを提供する。
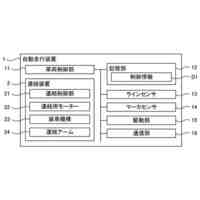
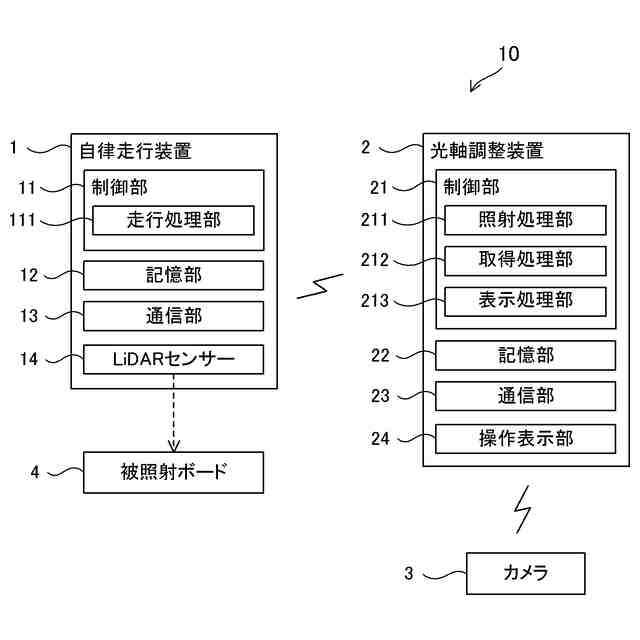
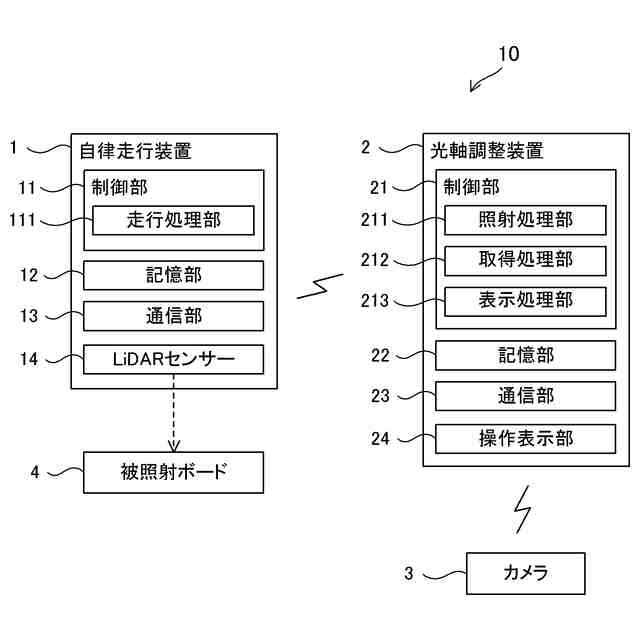
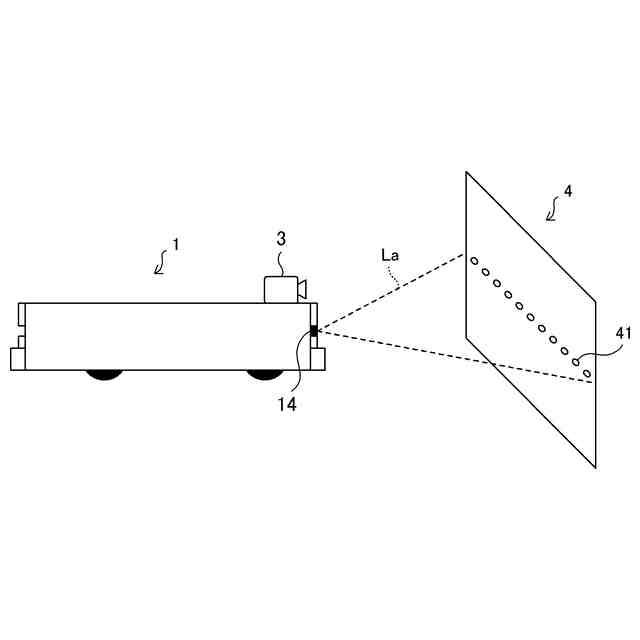
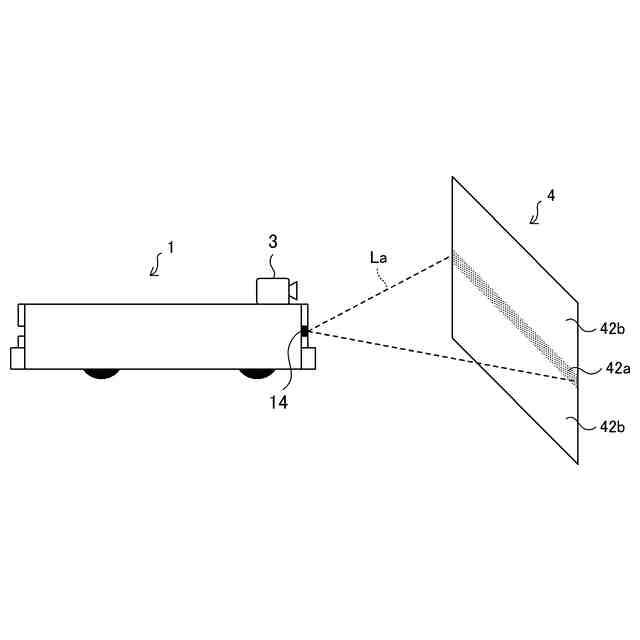
【解決手段】光軸調整システム10は、所定方向にレーザー光を走査して対象物までの距離を測定するLiDARセンサー14の光軸を調整する。照射処理部211は、LiDARセンサー14から所定距離だけ離れた位置に設置され、調整基準位置が規定される被照射ボード4に対して前記レーザー光を照射させる。取得処理部212は、前記レーザー光が照射された被照射ボード4を撮像するカメラ3から撮像画像を取得する。表示処理部213は、前記撮像画像を操作表示部24に表示させる。
【選択図】図1
特許請求の範囲
【請求項1】
所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整する光軸調整システムであって、
前記測定装置から所定距離だけ離れた位置に設置され、調整基準位置が規定される被照射部材に対して前記レーザー光を照射させる照射処理部と、
前記レーザー光が照射された前記被照射部材を撮像する撮像装置から撮像画像を取得する取得処理部と、
前記撮像画像を表示装置に表示させる表示処理部と、
を備える光軸調整システム。
続きを表示(約 1,600 文字)
【請求項2】
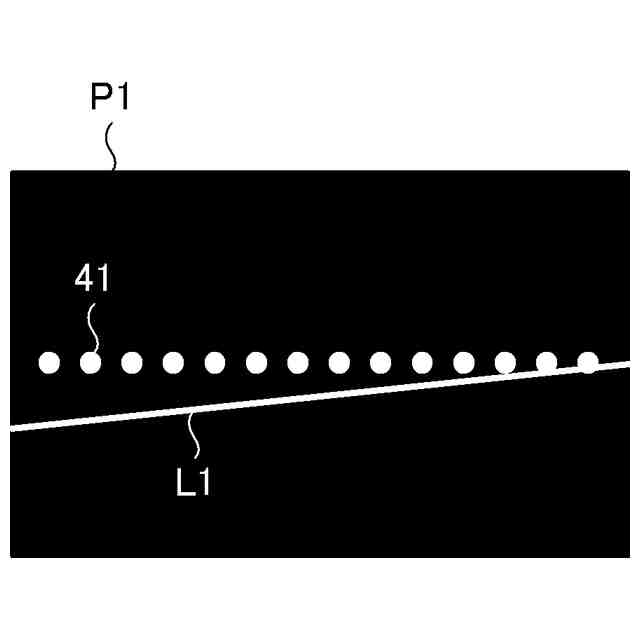
前記被照射部材は、前記調整基準位置を示す水平方向に延伸する基準線を備える、
請求項1に記載の光軸調整システム。
【請求項3】
前記撮像装置は、赤外線カメラであって、
前記被照射部材は、前記調整基準位置に、水平方向に並べられた複数の赤外線LEDを備え、
前記照射処理部は、前記赤外線LEDが点灯された状態で、前記被照射部材に対して前記レーザー光を照射させ、
前記取得処理部は、前記赤外線カメラにより撮像された前記撮像画像を取得する、
請求項1に記載の光軸調整システム。
【請求項4】
前記撮像装置は、赤外線カメラであって、
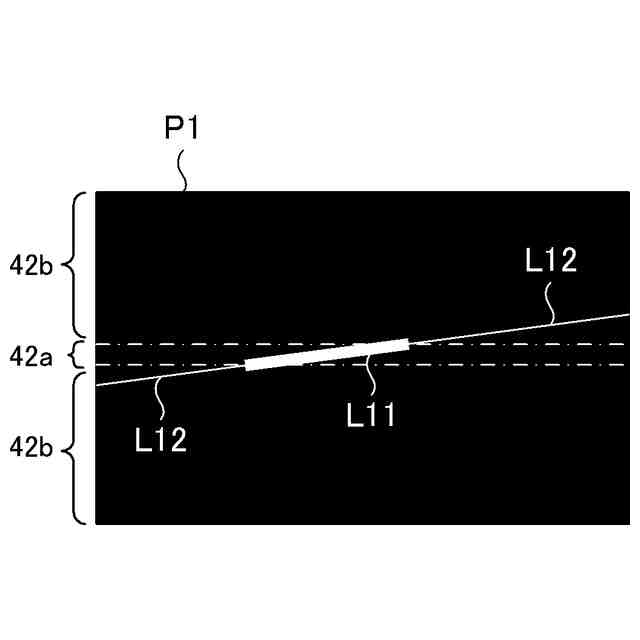
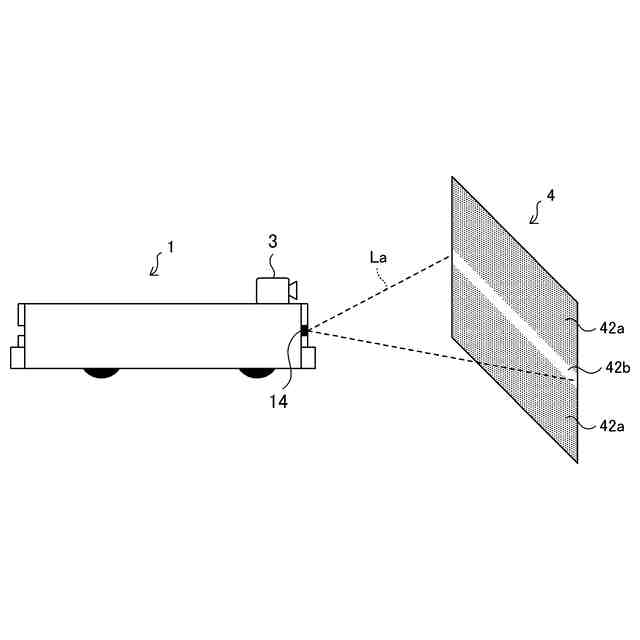
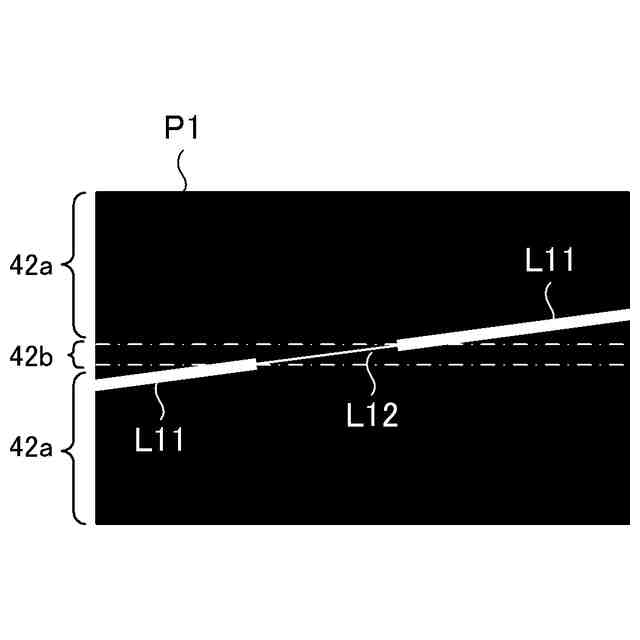
前記被照射部材は、第1領域に光の反射率が第1反射率の第1反射部材を備え、第2領域に前記第1反射率よりも反射率が低い第2反射率の第2反射部材を備え、
前記照射処理部は、前記第1反射部材又は前記第2反射部材に向けて前記レーザー光を照射させ、
前記取得処理部は、前記赤外線カメラにより撮像された前記撮像画像を取得する、
請求項1に記載の光軸調整システム。
【請求項5】
前記第1反射部材又は前記第2反射部材は、前記調整基準位置を示す水平方向に延伸する基準線で構成されている、
請求項4に記載の光軸調整システム。
【請求項6】
前記撮像装置は、赤外線カメラであって、
前記照射処理部は、前記測定装置から前記被照射部材に対して前記レーザー光を照射させ、かつ、前記測定装置の近傍に設置され、水平方向に赤外線レーザーを走査可能な赤外線照射装置から前記被照射部材に対して基準レーザー光を照射させ、
前記取得処理部は、前記レーザー光及び前記基準レーザー光のそれぞれが照射された前記被照射部材の撮像画像を取得する、
請求項1に記載の光軸調整システム。
【請求項7】
前記撮像装置は、赤外線カメラと非赤外線カメラとを含み、
前記取得処理部は、前記赤外線カメラ及び前記非赤外線カメラのそれぞれから、前記レーザー光が照射された前記被照射部材の撮像画像を取得し、
前記表示処理部は、前記赤外線カメラ及び前記非赤外線カメラのそれぞれから取得する2つの前記撮像画像を合成した合成画像を前記表示装置に表示させる、
請求項1に記載の光軸調整システム。
【請求項8】
前記測定装置は、自律走行装置に設置され、
前記照射処理部は、前記測定装置が前記自律走行装置に設置された状態で、前記レーザー光を照射させる、
請求項1~7のいずれかに記載の光軸調整システム。
【請求項9】
所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整する光軸調整方法であって、
前記測定装置から所定距離だけ離れた位置に設置され、調整基準位置を備える被照射部材に対して前記レーザー光を照射させることと、
前記レーザー光が照射された前記被照射部材を撮像する撮像装置から撮像画像を取得することと、
前記撮像画像を表示装置に表示させることと、
を一又は複数のプロセッサーが実行する光軸調整方法。
【請求項10】
所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整する光軸調整プログラムであって、
前記測定装置から所定距離だけ離れた位置に設置され、調整基準位置を備える被照射部材に対して前記レーザー光を照射させることと、
前記レーザー光が照射された前記被照射部材を撮像する撮像装置から撮像画像を取得することと、
前記撮像画像を表示装置に表示させることと、
を一又は複数のプロセッサーに実行させるための光軸調整プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整する技術に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、自己位置を推定しながら予め設定された経路を走行する自律走行型の走行装置(自律走行ロボット、AGVなど)が知られている。例えば、自律走行装置は、LiDARセンサー(ライダーセンサー)などの測定装置を備え、所定方向にレーザー光を走査して対象物までの距離を測定しながら自己位置を推定して自律走行する(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-146514号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自律走行装置を経路に従って正確に自律走行させるためには、測定装置におけるレーザー光の光軸を適切に設定しておく必要がある。例えば、作業者は、自律走行装置にLiDARセンサーを設置した後、レーザー光が正しい方向に照射されるように調整する。しかし、光軸を調整する作業は手間がかかる上、作業者によって調整精度にばらつきが生じる。
【0005】
本開示の目的は、所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を容易かつ精度よく調整することが可能な光軸調整システム、光軸調整方法、及び光軸調整プログラムを提供することにある。
【課題を解決するための手段】
【0006】
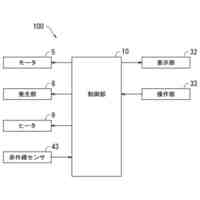
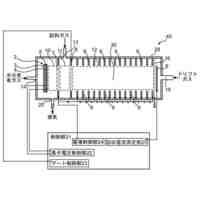
本開示の一の態様に係る光軸調整システムは、所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整するシステムである。前記光軸調整システムは、照射処理部と取得処理部と表示処理部とを備える。前記照射処理部は、前記測定装置から所定距離だけ離れた位置に設置され、調整基準位置が規定される被照射部材に対して前記レーザー光を照射させる。前記取得処理部は、前記レーザー光が照射された前記被照射部材を撮像する撮像装置から撮像画像を取得する。前記表示処理部は、前記撮像画像を表示装置に表示させる。
【0007】
本開示の他の態様に係る光軸調整方法は、所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整する方法である。前記光軸調整方法は、前記測定装置から所定距離だけ離れた位置に設置され、調整基準位置を備える被照射部材に対して前記レーザー光を照射させることと、前記レーザー光が照射された前記被照射部材を撮像する撮像装置から撮像画像を取得することと、前記撮像画像を表示装置に表示させることと、を一又は複数のプロセッサーが実行する方法である。
【0008】
本開示の他の態様に係る光軸調整プログラムは、所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を調整するプログラムである。前記光軸調整プログラムは、前記測定装置から所定距離だけ離れた位置に設置され、調整基準位置を備える被照射部材に対して前記レーザー光を照射させることと、前記レーザー光が照射された前記被照射部材を撮像する撮像装置から撮像画像を取得することと、前記撮像画像を表示装置に表示させることと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本開示によれば、所定方向にレーザー光を走査して対象物までの距離を測定する測定装置の光軸を容易かつ精度よく調整することが可能な光軸調整システム、光軸調整方法、及び光軸調整プログラムを提供することができる。
【図面の簡単な説明】
【0010】
図1は、本開示の実施形態に係る光軸調整システムの全体構成を示すブロック図である。
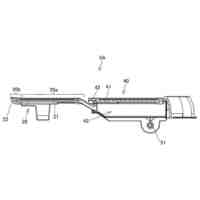
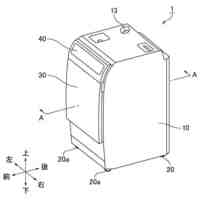
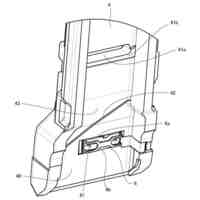
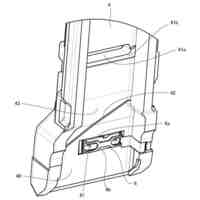
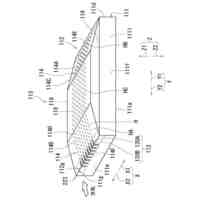
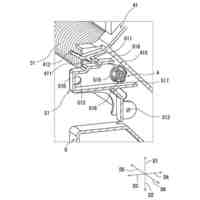
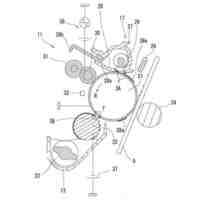
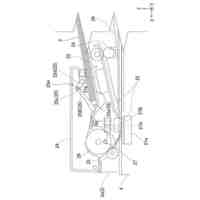
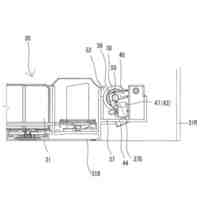
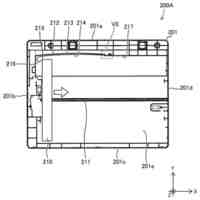
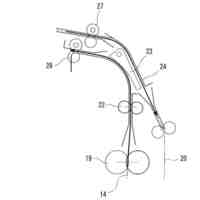
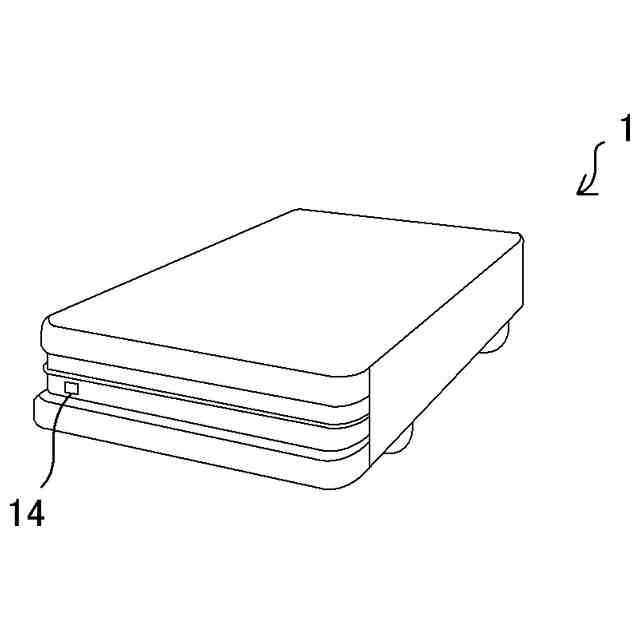
図2は、本開示の実施形態に係る自律走行装置の外観を示す斜視図である。
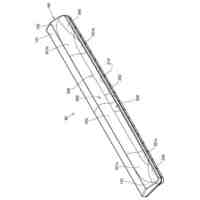
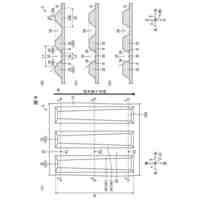
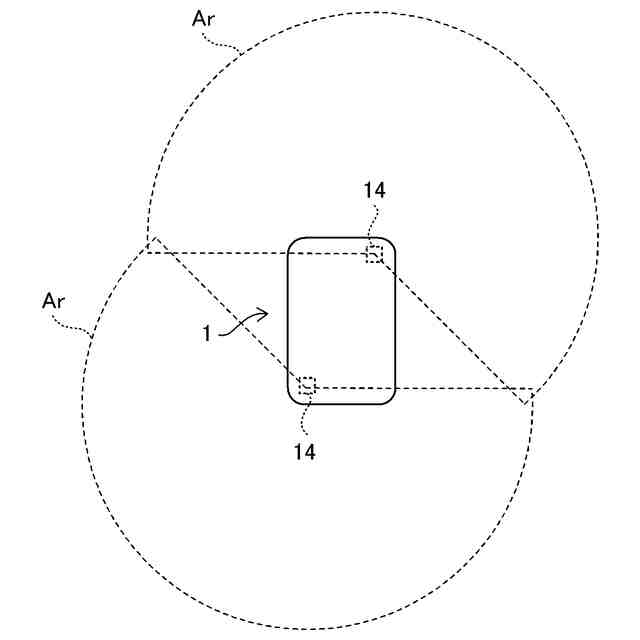
図3は、本開示の実施形態に係るLiDARセンサーの検知可能範囲の一例を示す図である。
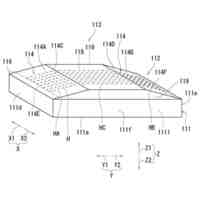
図4Aは、本開示の実施形態1に係る光軸調整方法の一例を示す図である。
図4Bは、本開示の実施形態1に係る光軸調整方法の一例を示す図である。
図5Aは、本開示の実施形態2に係る光軸調整方法の一例を示す図である。
図5Bは、本開示の実施形態2に係る光軸調整方法の一例を示す図である。
図6Aは、本開示の実施形態3に係る光軸調整方法の一例を示す図である。
図6Bは、本開示の実施形態3に係る光軸調整方法の一例を示す図である。
図7Aは、本開示の実施形態4に係る光軸調整方法の一例を示す図である。
図7Bは、本開示の実施形態4に係る光軸調整方法の一例を示す図である。
図8Aは、本開示の実施形態5に係る光軸調整方法の一例を示す図である。
図8Bは、本開示の実施形態5に係る光軸調整方法の一例を示す図である。
図9Aは、本開示の実施形態6に係る光軸調整方法の一例を示す図である。
図9Bは、本開示の実施形態6に係る光軸調整方法の一例を示す図である。
図10Aは、本開示の実施形態7に係る光軸調整方法の一例を示す図である。
図10Bは、本開示の実施形態7に係る光軸調整方法の一例を示す図である。
図11Aは、本開示の実施形態8に係る光軸調整方法の一例を示す図である。
図11Bは、本開示の実施形態8に係る光軸調整方法の一例を示す図である。
図12は、本開示の実施形態9に係る光軸調整方法の一例を示す図である。
図13Aは、本開示の実施形態10に係る光軸調整方法の一例を示す図である。
図13Bは、本開示の実施形態10に係る光軸調整方法の一例を示す図である。
図14は、本開示の実施形態に係る自律走行システムにおいて実行される自律走行処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
シャープ株式会社
冷却庫
16日前
シャープ株式会社
洗濯機
1日前
シャープ株式会社
冷却庫
18日前
シャープ株式会社
冷蔵庫
9日前
シャープ株式会社
冷却庫
5日前
シャープ株式会社
冷却庫
18日前
シャープ株式会社
冷蔵庫
18日前
シャープ株式会社
冷却庫
5日前
シャープ株式会社
ケース
5日前
シャープ株式会社
送風装置
9日前
シャープ株式会社
面構造体
9日前
シャープ株式会社
送風装置
9日前
シャープ株式会社
照明装置
3日前
シャープ株式会社
送風装置
11日前
シャープ株式会社
加熱調理器
18日前
シャープ株式会社
空気調和機
16日前
シャープ株式会社
加熱調理器
16日前
シャープ株式会社
洗濯キャップ
1日前
シャープ株式会社
空気浄化装置
19日前
シャープ株式会社
画像形成装置
24日前
シャープ株式会社
画像読取装置
1日前
シャープ株式会社
画像形成装置
3日前
シャープ株式会社
掃除機スタンド
24日前
シャープ株式会社
IMS分析装置
5日前
シャープ株式会社
ケース及び冷却庫
5日前
シャープ株式会社
送風装置及び団扇
9日前
シャープ株式会社
ケースおよび冷蔵庫
16日前
シャープ株式会社
冷蔵庫の扉および冷蔵庫
1日前
シャープ株式会社
冷却庫の棚板、及び冷却庫
16日前
シャープ株式会社
冷却庫の棚板、及び冷却庫
16日前
シャープ株式会社
連結装置及び自動走行装置
1日前
シャープ株式会社
動画像符号化装置、復号装置
25日前
シャープ株式会社
給紙装置、及び、画像形成装置
10日前
シャープ株式会社
画像読取装置及び画像形成装置
25日前
シャープ株式会社
用紙搬送装置及び画像形成装置
17日前
シャープ株式会社
電子写真感光体及び画像形成装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ