TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025068999
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023179160
出願日
2023-10-17
発明の名称
海洋ロボットの制御装置、海洋ロボット、海洋ロボットの制御方法、および海洋ロボットの制御プログラム
出願人
国立大学法人東京海洋大学
,
国立研究開発法人日本原子力研究開発機構
,
国立研究開発法人海洋研究開発機構
代理人
個人
,
個人
主分類
B63H
25/42 20060101AFI20250422BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】外乱が大きい場合であっても、海洋ロボットの位置を精度よく保持すること。
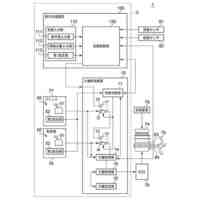
【解決手段】第1の推進器および第2の推進器を有する推進機構を備える海洋ロボットを制御する制御装置であって、海洋ロボットの目標位置および現在位置を含む位置情報を取得する情報取得部と、位置情報に基づいて切換関数を生成し、海洋ロボットの現在位置が目標位置に一致するようにスライディングモード制御を行うためのスライディングモード制御値を生成するスライディングモード制御部と、位置情報および切換関数に基づいて、海洋ロボットの現在位置が目標位置に一致するようにニューラルネットワーク制御を行うためのニューラルネットワーク制御値を生成するニューラルネットワーク制御部と、スライディングモード制御値およびニューラルネットワーク制御値に基づいて推進機構に入力される制御入力を生成する制御入力生成部とを備える。
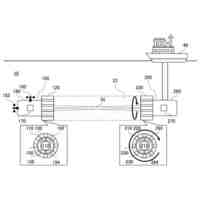
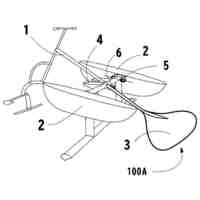
【選択図】図1
特許請求の範囲
【請求項1】
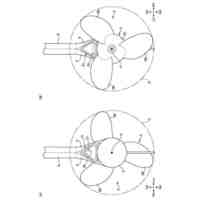
第1の推進方向の推力を発生する第1の推進器と、前記第1の推進方向と異なる第2の推進方向の推力を発生する第2の推進器とを有する推進機構を備える海洋ロボットを制御する制御装置であって、
前記海洋ロボットの目標位置および現在位置を含む位置情報を取得する情報取得部と、
前記位置情報に基づいて切換関数を生成し、前記海洋ロボットの現在位置が前記目標位置に一致するようにスライディングモード制御を行うためのスライディングモード制御値を生成するスライディングモード制御部と、
前記位置情報および前記切換関数に基づいて、前記海洋ロボットの現在位置が前記目標位置に一致するようにニューラルネットワーク制御を行うためのニューラルネットワーク制御値を生成するニューラルネットワーク制御部と、
前記スライディングモード制御値および前記ニューラルネットワーク制御値に基づいて前記推進機構に入力される制御入力を生成する制御入力生成部と、
を備える、海洋ロボットの制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記スライディングモード制御値は、スライディングモード制御における切換入力であり、
前記ニューラルネットワーク制御値は、前記切換入力に対する補正入力であり、
前記制御入力は、前記スライディングモード制御値と前記ニューラルネットワーク制御値の和である、請求項1に記載の制御装置。
【請求項3】
前記ニューラルネットワーク制御値の絶対値の上限値は、前記スライディングモード制御値の絶対値の上限値以下である、請求項2に記載の制御装置。
【請求項4】
前記ニューラルネットワーク制御値の絶対値の上限値は時間変化する、請求項3に記載の制御装置。
【請求項5】
前記ニューラルネットワーク制御値の絶対値の上限値は、前記海洋ロボットが前記目標位置を中心とする所定の範囲内にある場合、前記スライディングモード制御値の絶対値の上限値に近づける、請求項4に記載の制御装置。
【請求項6】
前記ニューラルネットワーク制御部は、前記切換関数に基づいて重み付けが更新されるニューラルネットワークを備える、
請求項1に記載の制御装置。
【請求項7】
前記ニューラルネットワークは、入力層、1つの中間層、および出力層の3つの層からなる、請求項6に記載の制御装置。
【請求項8】
前記位置情報と、前記切換関数の時間微分とに基づいて、前記海洋ロボットの現在位置が前記目標位置に一致するようにニューラルネットワーク制御を行うための第2のニューラルネットワーク制御値を生成する第2のニューラルネットワーク制御部をさらに備え、
前記制御入力生成部は、前記スライディングモード制御値、前記ニューラルネットワーク制御値、および前記第2のニューラルネットワーク制御値に基づいて前記制御入力を生成する、請求項1に記載の制御装置。
【請求項9】
前記スライディングモード制御値は、スライディングモード制御における切換入力であり、
前記ニューラルネットワーク制御値は前記切換入力に対する補正入力であり、
前記第2のニューラルネットワーク制御値は前記切換入力に対する第2の補正入力であり、
前記制御入力は、前記スライディングモード制御値、前記ニューラルネットワーク制御値、および前記第2のニューラルネットワーク制御値の和である、請求項8に記載の制御装置。
【請求項10】
前記ニューラルネットワーク制御値の絶対値の上限値、および、前記第2のニューラルネットワーク制御値の絶対値の上限値は、いずれも前記スライディングモード制御値の絶対値の上限値以下である、請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、海洋ロボットの制御装置、海洋ロボット、海洋ロボットの制御方法、および海洋ロボットの制御プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
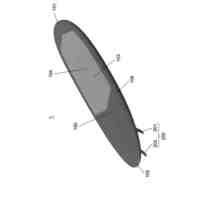
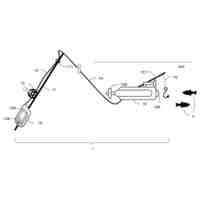
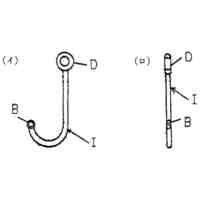
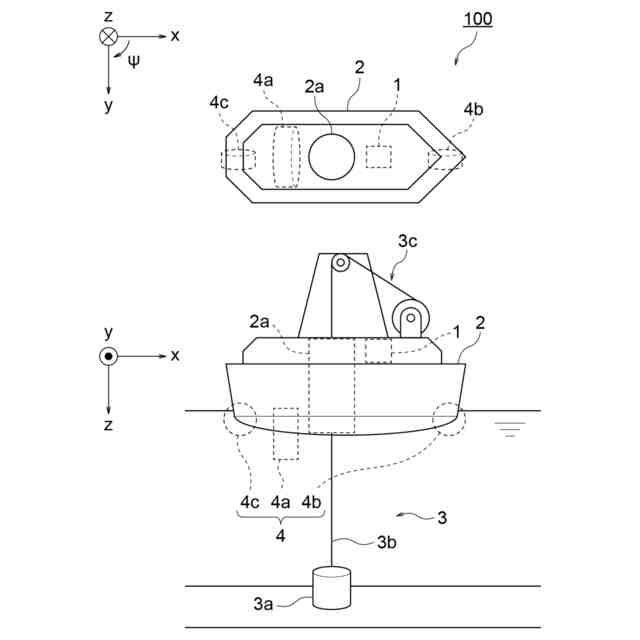
海底の調査を省力的かつ効率的に行うために、様々な海洋ロボットが用いられている。海洋ロボットとして、自動水上航行体(Autonomous Surface Vehicle:ASV)、遠隔操作型無人潜水機(Remotely Operated Vehicle:ROV)、自律型無人潜水機(Autonomous Underwater Vehicle:AUV)等が知られている。海底の泥等を採取し、泥に含まれる放射線の量を測定する場合、ASVが用いられる。この場合は、たとえば、ASVを海上の目標位置に移動させ、ケーブル(光ファイバケーブル等の通信ケーブル)に接続された採泥器を海底まで投下して泥等を採取する。
【0003】
なお、特許文献1には、浮体式リグを掘削ライザーにとって最適の位置に位置保持制御することを目的とした制御装置が記載されている。この制御装置では、予め掘削ライザーの挙動特性に伴う浮体式リグの位置情報をニューラルネットワークに学習させておき、掘削ライザーの上下端傾斜角を検出してニューラルネットワークに入力することにより浮体式リグの現在位置修正情報を出力させ、当該位置情報に基づき浮体式リグをライザー上下端傾斜角が小さくなる位置に駆動制御する。
【先行技術文献】
【特許文献】
【0004】
特開2000-289688号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
海底の泥等を安定して採取するには、自動水上航行体の位置および角度について、細かな定点保持が必要である。なぜなら、自動水上航行体の位置が海底に投下された採泥器等の投下物の上方から大きく外れてしまうと、投下物が海中で転倒するおそれがあるからである。また、自動水上航行体が大きく回転してしまうと、ケーブルが捩れ、破断するおそれがある。
【0006】
従来、自動水上航行体の位置および角度の保持には、スライディングモード制御が用いられている。スライディングモード制御は、モデル誤差や外乱の影響を受けにくいという特徴がある。しかしながら、風が強い、波が速い等の環境においては自動水上航行体が受ける外乱が大きいため、その運動特性は大きく変化する。したがって、固定の制御パラメータを用いるスライディングモード制御では、自動水上航行体の定点保持を行うことが困難であった。
【0007】
本発明は上記の認識に基づいてなされたものであり、外乱が大きい場合であっても、海洋ロボットの位置を精度よく保持することができる海洋ロボットの制御装置、海洋ロボット、海洋ロボットの制御方法、および海洋ロボットの制御プログラムを提供することである。
【課題を解決するための手段】
【0008】
本発明に係る海洋ロボットの制御装置は、
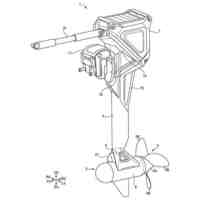
第1の推進方向の推力を発生する第1の推進器と、前記第1の推進方向と異なる第2の推進方向の推力を発生する第2の推進器とを有する推進機構を備える海洋ロボットを制御する制御装置であって、
前記海洋ロボットの目標位置および現在位置を含む位置情報を取得する情報取得部と、
前記位置情報に基づいて切換関数を生成し、前記海洋ロボットの現在位置が前記目標位置に一致するようにスライディングモード制御を行うためのスライディングモード制御値を生成するスライディングモード制御部と、
前記位置情報および前記切換関数に基づいて、前記海洋ロボットの現在位置が前記目標位置に一致するようにニューラルネットワーク制御を行うためのニューラルネットワーク制御値を生成するニューラルネットワーク制御部と、
前記スライディングモード制御値および前記ニューラルネットワーク制御値に基づいて前記推進機構に入力される制御入力を生成する制御入力生成部と、
を備えることを特徴とする。
【0009】
また、前記制御装置において、
前記スライディングモード制御値は、スライディングモード制御における切換入力であり、
前記ニューラルネットワーク制御値は、前記切換入力に対する補正入力であり、
前記制御入力は、前記スライディングモード制御値と前記ニューラルネットワーク制御値の和であるようにしてもよい。
【0010】
また、前記制御装置において、
前記ニューラルネットワーク制御値の絶対値の上限値は、前記スライディングモード制御値の絶対値の上限値以下であるようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人東京海洋大学
魚類の冷凍方法
5日前
ソフトバンク株式会社
通信システム、水中光通信体、及び制御方法
6日前
個人
水上遊具
4か月前
個人
川下り用船
10か月前
個人
洋上研究所
2か月前
個人
発電船
11か月前
個人
津波防災ウエア
1か月前
個人
船用横揺防止具
8か月前
個人
補助機構
6か月前
個人
コンパクトシティ船
6か月前
個人
渦流動力推進構造
6か月前
個人
セールのバテンガイド装置
3か月前
炎重工株式会社
浮標
9か月前
個人
水質浄化・集熱昇温システム
3か月前
炎重工株式会社
浮標
9か月前
住友重機械工業株式会社
船舶
3か月前
炎重工株式会社
移動体
12か月前
株式会社ラフティ
サーフボード
3か月前
個人
船舶
9か月前
個人
スクリュープロペラ
6か月前
株式会社フルトン
水中捕捉装置
7か月前
オーケー工業株式会社
係留フック
7か月前
個人
回転式による流体流出防止タンカー
6か月前
スズキ株式会社
船外機
6か月前
スズキ株式会社
船外機
5か月前
常石造船株式会社
メタノール燃料船
10か月前
株式会社アカデミー出版
船舶
2か月前
スズキ株式会社
船外機
6か月前
スズキ株式会社
船外機
5か月前
ヤマハ発動機株式会社
船外機
9か月前
朝日電装株式会社
船外機用照明装置
2か月前
株式会社神戸タフ興産
船舶の甲板構造
10か月前
藤倉コンポジット株式会社
架台
9か月前
炎重工株式会社
自律航行浮遊体
9か月前
ナブテスコ株式会社
主機制御システム
12日前
株式会社ユピテル
システム及びプログラム等
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ