TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035816
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023143102
出願日
2023-09-04
発明の名称
航行支援装置、情報処理方法、プログラム
出願人
日本無線株式会社
,
国立大学法人東京海洋大学
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
3/02 20060101AFI20250307BHJP(信号)
要約
【課題】船舶の航行をより円滑にする。
【解決手段】衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して自船の針路があり、自船に対して相手船が行会いの関係または自船に対して相手船が行会いと横切りの間の関係にあるとき、相手船の針路が第1角度の変針をした場合に生じる第2航行妨害ゾーンに対して避航可能な針路である第1針路を自船の針路として決定する第1決定部と、第1針路上に、相手船の針路が第1角度よりも大きな第2角度の変針をした場合に生じる第3航行妨害ゾーンに到達するまで第1針路に基づいて自船が航行されると、自船の針路を、第3航行妨害ゾーンに向かう針路である第2針路として決定する第2決定部と、第2針路に向かう角度よりも自船の目的地に対して変針した場合の変針角度の方が小さい場合に、自船の針路を目的地に向かう方位の針路である第3針路として決定する第3決定部とを有する。
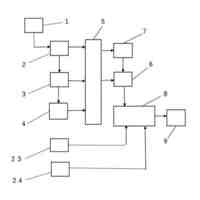
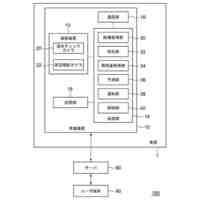
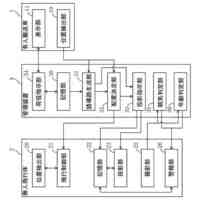
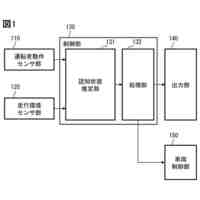
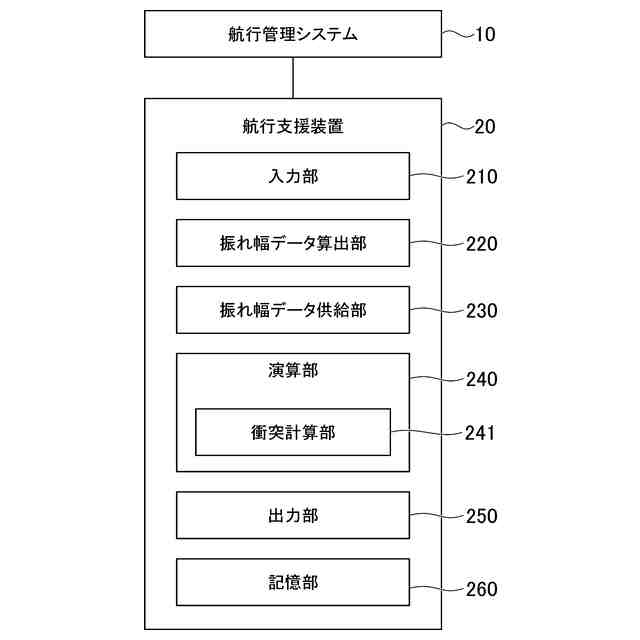
【選択図】図1
特許請求の範囲
【請求項1】
自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が行会いの関係または前記自船に対して前記相手船が行会いと横切りの間の関係にあるとき、前記相手船の針路が第1角度の変針をした場合に生じる第2航行妨害ゾーンに対して避航可能な針路である第1針路を前記自船の針路として決定する第1決定部と、
前記第1針路上に、前記相手船の針路が第1角度よりも大きな第2角度の変針をした場合に生じる第3航行妨害ゾーンに到達するまで前記第1針路に基づいて前記自船が航行されると、前記自船の針路を、前記第3航行妨害ゾーンに向かう針路である第2針路として決定する第2決定部と、
前記第2針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定する角度判定部と、
前記第2針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第3針路として決定する第3決定部と
を有する航行支援装置。
続きを表示(約 1,800 文字)
【請求項2】
自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が横切りの関係にあり、かつ、角度ランクに対応する第2航行妨害ゾーンを回避する針路が相手船の方位より大きい場合に、前記自船の針路を前記相手船に向かう針路である第4針路を前記自船の針路として決定する第1決定部と、
前記第4針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定する角度判定部と、
前記第4針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第5針路として決定する第3決定部と
を有する航行支援装置。
【請求項3】
自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が横切りの関係にあり、かつ、角度ランクに対応する第2航行妨害ゾーンを回避する針路が相手船の方位以下である場合に、前記相手船の針路が第1角度の変針をした場合に生じる第2航行妨害ゾーンに対して避航可能な針路である第1針路を前記自船の針路として決定する第1決定部と、
前記第1針路上に、前記相手船が到達するまで前記第1針路に基づいて前記自船が航行され、前記第1針路に前記相手船が到達すると、前記自船の針路を、前記相手船に向かう針路である第6針路として決定する第2決定部と、
前記第6針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定する角度判定部と、
前記第6針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第7針路として決定する第3決定部と
を有する航行支援装置。
【請求項4】
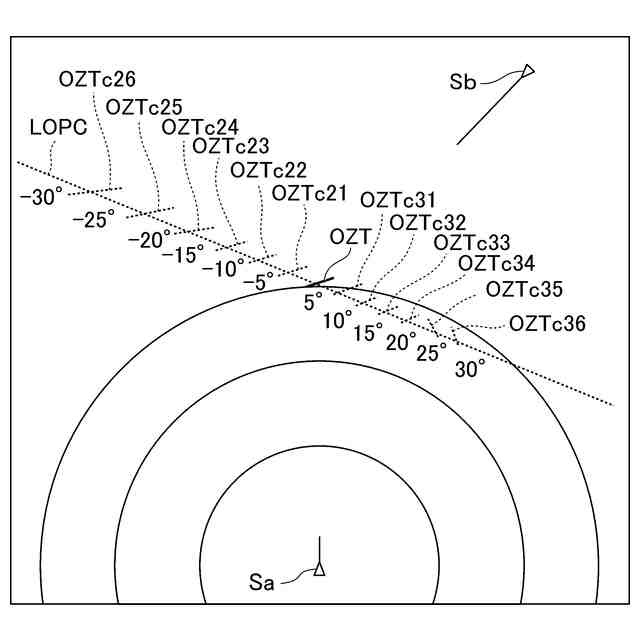
前記自船と前記相手船とのそれぞれの位置、針路及び速力とに基づいて衝突予測点の軌跡に基づくLOPCを求め、当該LOPC上のいずれの位置に前記第1航行妨害ゾーンが有るかに基づいて見合い関係を判定する見合い関係判定部を有する
請求項1から請求項3のうちいずれか1項に記載の航行支援装置。
【請求項5】
前記自船から前記第1航行妨害ゾーンまでの距離に基づいて、前記第1角度を選定する角度ランク選定部
を有する請求項1から請求項3のうちいずれか1項に記載の航行支援装置。
【請求項6】
前記角度ランク選定部は、前記自船と前記第1航行妨害ゾーンとの距離が長くなるほど第1角度が小さくなるように選定する
請求項5に記載の航行支援装置。
【請求項7】
自船と相手船との関係に応じた航行妨害ゾーンを出力する航行支援装置であって、
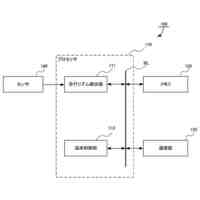
前記相手船の針路と速力のうち少なくともいずれか1つについての変動の度合いを表す振れ幅データを、航行妨害ゾーンを計算する計算部に与える振れ幅データ供給部と、
前記振れ幅データに基づいて計算された、前記相手船の現在の行動に基づいて生成される航行妨害ゾーンとは異なる航行妨害ゾーンを出力する出力部
を有する航行支援装置。
【請求項8】
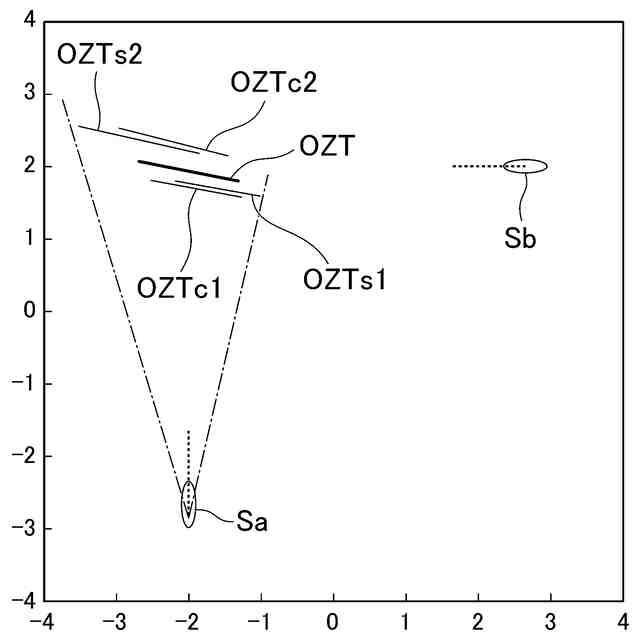
前記出力部は、前記相手船の前記現在の行動に基づいて計算された第1航行妨害ゾーンとは異なる表示態様によって、前記振れ幅データに基づいて計算された第2航行妨害ゾーンを表示画面に表示させる
請求項7に記載の航行支援装置。
【請求項9】
前記相手船の過去の行動の傾向から前記相手船の行動の変化の度合いを求める振れ幅データ算出部を有し、
前記振れ幅データ供給部は、前記行動の変化の度合いを振れ幅データとして前記計算部に与える
請求項8に記載の航行支援装置。
【請求項10】
前記振れ幅データ算出部は、前記相手船の過去の動向の傾向に基づく、前記針路または前記速力の平均値と標準偏差を求め、
前記振れ幅データ供給部は、前記平均値と前記標準偏差とに基づく振れ幅データを前記計算部に与える
請求項9に記載の航行支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、航行支援装置、情報処理方法、プログラムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
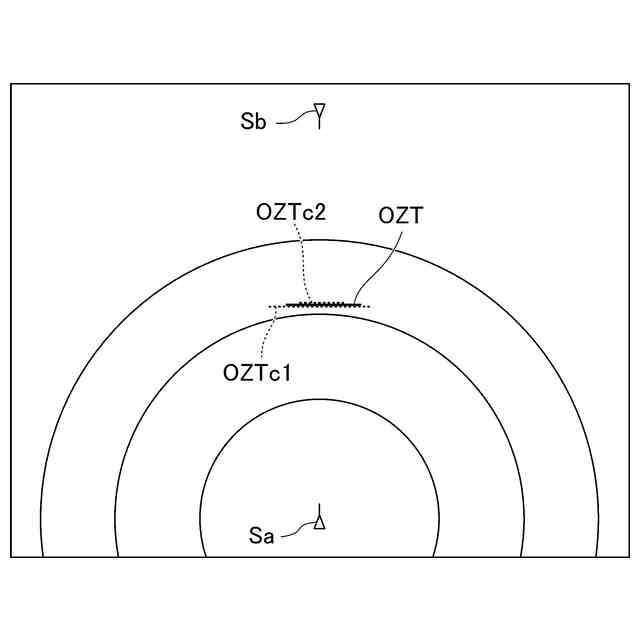
近年、航海を支援するシステムとして、自船と相手船との衝突の危険性を把握可能に表示するシステムがある。例えば、自船と相手船とについて、衝突計算を行い、衝突計算の結果に基づいて、相手船による航行妨害ゾーン(OZT:Obstacle Zone by Target)を表示するシステムがある(例えば、特許文献1)。
このようなシステムでは、航行者は、航行妨害ゾーンが表示された場合に、注意すべき範囲を具体的に把握することができる。また、航行者は、表示された航行妨害ゾーンを避けて操船すれば、相手の船舶とは衝突せずに航行することが可能である。
また、OZT計算に利用する船速ベクトルの計測結果のバラツキを原因として表示されるOZTの位置が安定しないことを考慮し、OZTを示す円の表示サイズを大きくするシステムもある(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0003】
特開2020-095333号公報
国際公開第2020-008776号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、表示されたOZTを参照し、相手船との衝突を回避するように避航行動をしたとしても、相手船の行動の針路または速力等の行動に変動があった場合には、OZTも変わる。そうすると、自船の操船者は、表示されたOZTが変更された後、現在の自船の針路や速力を変更する必要があるか否かを判断しなければならない。また、相手船の行動に変化がある毎に、OZTの表示が変更されるため、自船の操船者は、その都度、自船の針路等を変更する必要があるか否かを判断しなければならず、操船における負担がかかる。
相手船の行動のバラツキを考慮してOZTの表示サイズを大きくした場合には、バラツキが無い場合との区別がつかないため、自船の避航行動を必要以上に大きくとらなければならない場合も生じる。
また、OZTを回避するだけでは、自船の避航意思が相手船に伝わりにくい場合がある。その場合、相手船の操船者が感じる衝突リスクに関する不安を低減することが難しいため、安心を与えることが難しい。
【0005】
本発明は、このような事情に鑑みてなされたもので、その目的は、船舶の航行をより円滑にすることができる航行支援装置、情報処理方法、プログラムを提供することにある。
【課題を解決するための手段】
【0006】
上述した課題を解決するために、本発明の一態様は、自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が行会いの関係または前記自船に対して前記相手船が行会いと横切りの間の関係にあるとき、前記相手船の針路が第1角度の変針をした場合に生じる第2航行妨害ゾーンに対して避航可能な針路である第1針路を前記自船の針路として決定する第1決定部と、前記第1針路上に、前記相手船の針路が第1角度よりも大きな第2角度の変針をした場合に生じる第3航行妨害ゾーンに到達するまで前記第1針路に基づいて前記自船が航行されると、前記自船の針路を、前記第3航行妨害ゾーンに向かう針路である第2針路として決定する第2決定部と、前記第2針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定する角度判定部と、前記第2針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第3針路として決定する第3決定部とを有する航行支援装置である。
【0007】
また、本発明の一態様は、自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が横切りの関係にあり、かつ、角度ランクに対応する第2航行妨害ゾーンを回避する針路が相手船の方位より大きい場合に、前記自船の針路を前記相手船に向かう針路である第4針路を前記自船の針路として決定する第1決定部と、前記第4針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定する角度判定部と、前記第4針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第5針路として決定する第3決定部とを有する航行支援装置である。
【0008】
また、本発明の一態様は、自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が横切りの関係にあり、かつ、角度ランクに対応する第2航行妨害ゾーンを回避する針路が相手船の方位以下である場合に、前記相手船の針路が第1角度の変針をした場合に生じる第2航行妨害ゾーンに対して避航可能な針路である第1針路を前記自船の針路として決定する第1決定部と、前記第1針路上に、前記相手船が到達するまで前記第1針路に基づいて前記自船が航行され、前記第1針路に前記相手船が到達すると、前記自船の針路を、前記相手船に向かう針路である第6針路として決定する第2決定部と、前記第6針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定する角度判定部と、前記第6針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第7針路として決定する第3決定部とを有する航行支援装置である。
【0009】
また、本発明の一態様は、自船と相手船との関係に応じた航行妨害ゾーンを出力する航行支援装置であって、前記相手船の針路と速力のうち少なくともいずれか1つについての変動の度合いを表す振れ幅データを、航行妨害ゾーンを計算する計算部に与える振れ幅データ供給部と、前記振れ幅データに基づいて計算された、前記相手船の現在の行動に基づいて生成される航行妨害ゾーンとは異なる航行妨害ゾーンを出力する出力部を有する航行支援装置である。
【0010】
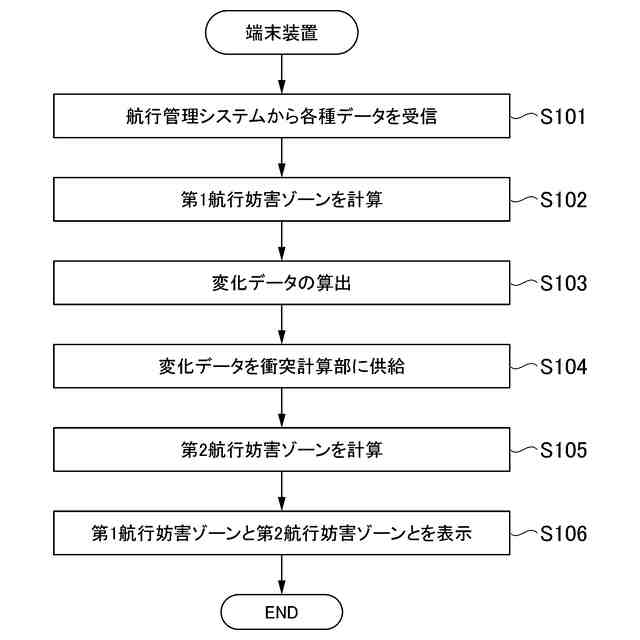
また、本発明の一態様は、コンピュータにより実行される情報処理方法であって、第1決定部が、自船と相手船とについての衝突計算を行うことによって求められる、衝突リスクが生じる領域を示す第1航行妨害ゾーンに対して前記自船の針路があり、前記自船に対して前記相手船が行会いの関係または前記自船に対して前記相手船が行会いと横切りの間の関係にあるとき、前記相手船の針路が第1角度の変針をした場合に生じる第2航行妨害ゾーンに対して避航可能な針路である第1針路を前記自船の針路として決定し、第2決定部が、前記第1針路上に、前記相手船の針路が第1角度よりも大きな第2角度の変針をした場合に生じる第3航行妨害ゾーンに到達するまで前記第1針路に基づいて前記自船が航行されると、前記自船の針路を、前記第3航行妨害ゾーンに向かう針路である第2針路として決定し、角度判定部が、前記第2針路に向かう角度と前記自船の目的地に対して変針した場合の変針角度との大小関係を判定し、第3決定部が、前記第2針路に向かう角度よりも前記変針角度の方が小さい場合に、前記自船の針路を前記目的地に向かう方位の針路である第3針路として決定する航行支援方法である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
キャパシタ過電流制限回路
11日前
日本無線株式会社
衛星信号受信機及び衛星信号受信機における測位方法
11日前
日本無線株式会社
燃料切替支援システム、燃料切替支援方法、プログラム
20日前
上田日本無線株式会社
超音波診断画像処理プローブ装置、超音波診断装置及び尿量計測装置
5日前
日本無線株式会社
降雨減衰係数推定装置、降雨減衰係数推定プログラム及び降雨減衰係数推定システム
7日前
日本無線株式会社
無線受信装置およびバースト検出方法
18日前
個人
安全運転車両
27日前
個人
自動車ケアフル灯
24日前
個人
空飛ぶ自動車の空路
1か月前
個人
出会い頭事故防止装置
1か月前
個人
忘れ物検出装置
1か月前
能美防災株式会社
発信機
27日前
個人
逆走・正走車両検出システム
4日前
日本信号株式会社
情報管理システム
1か月前
日本信号株式会社
情報提供システム
3日前
株式会社島津製作所
警報装置
1か月前
ホーチキ株式会社
監視システム
1か月前
タック株式会社
安全監視システム
1か月前
株式会社SUBARU
車速制御システム
1か月前
株式会社JVCケンウッド
通知システム
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
1か月前
本田技研工業株式会社
路面評価装置
1か月前
株式会社アジラ
注目行動呼びかけシステム
26日前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
27日前
三菱ロジスネクスト株式会社
搬送システム
27日前
三菱ロジスネクスト株式会社
搬送システム
27日前
三菱ロジスネクスト株式会社
搬送システム
27日前
日本信号株式会社
路側装置及びセンサ装置
1か月前
河村電器産業株式会社
警報装置
1か月前
株式会社デンソー
運転支援装置
1か月前
能美防災株式会社
非常報知システム
11日前
トヨタ自動車株式会社
車両
26日前
株式会社知財事業研究所
運行計画作成システム
1か月前
東亜電子工業株式会社
警報コントローラ
19日前
トヨタ自動車株式会社
方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ